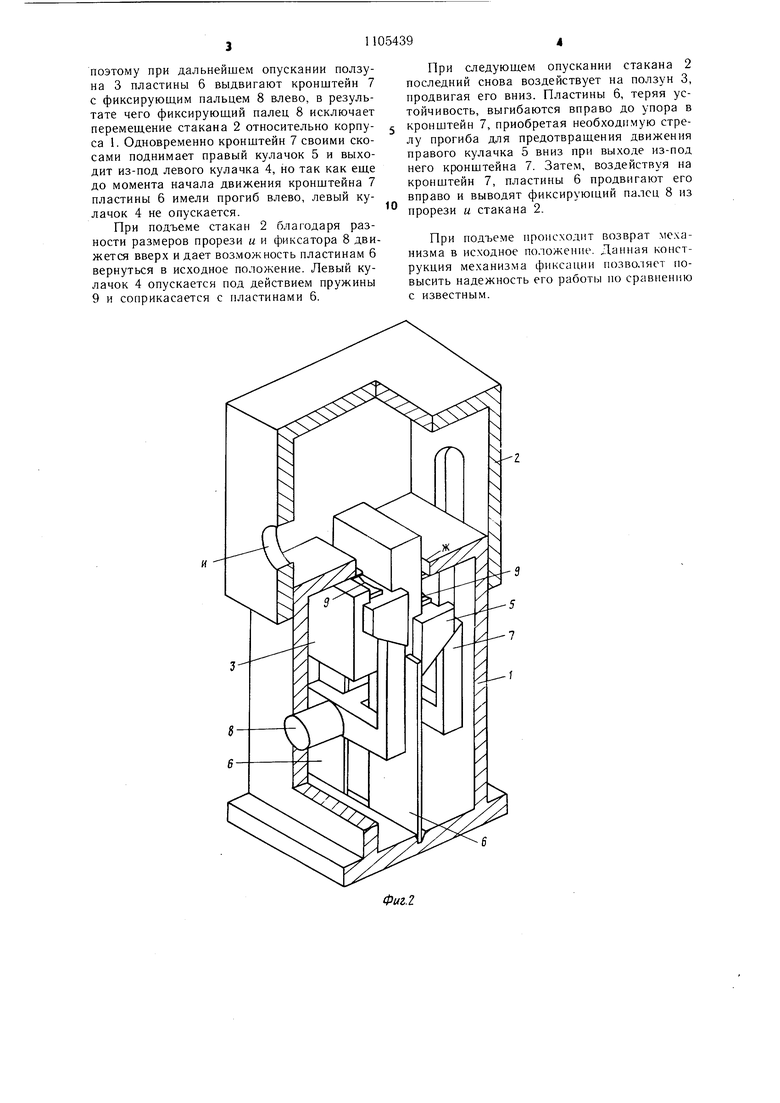
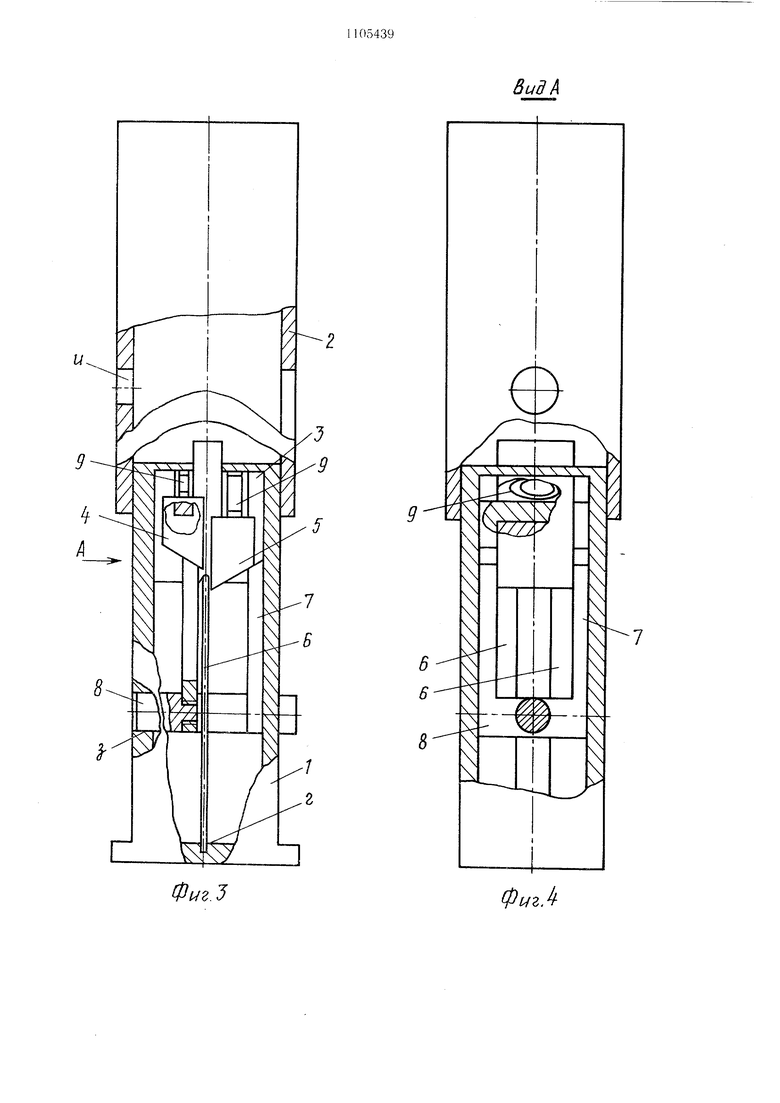
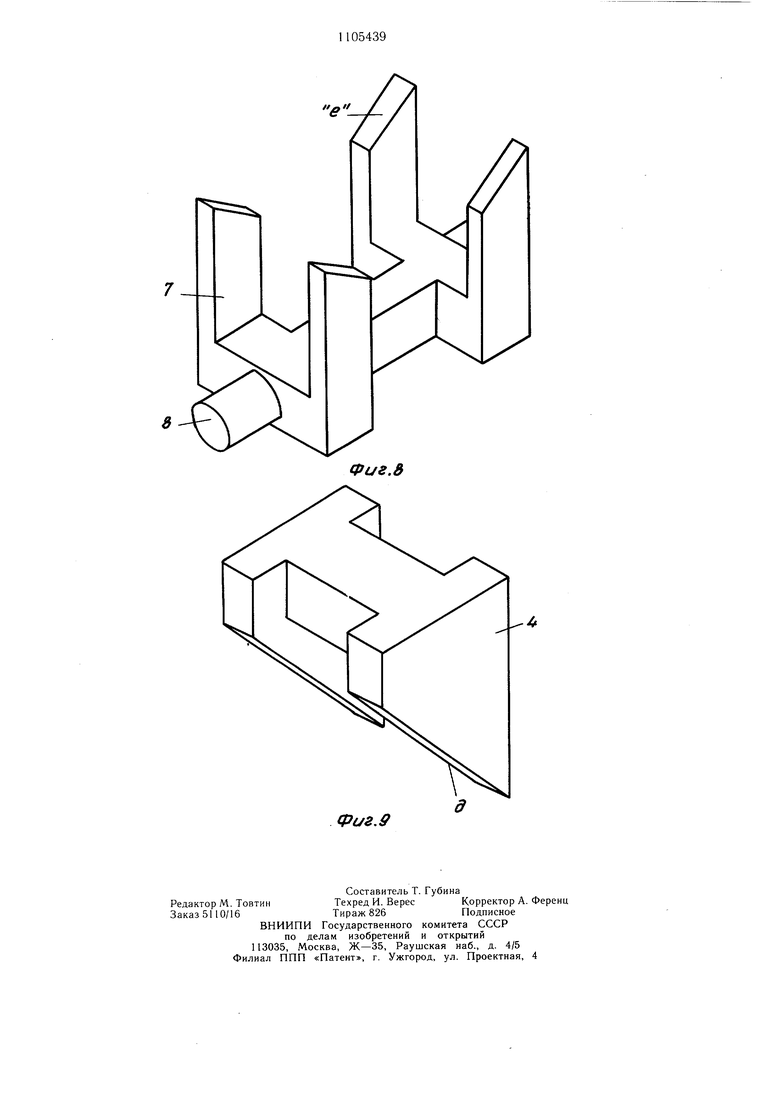
Изобретение относится к подъемно-транспортному оборудованию. Известен механизм фиксации захватного устройства, содержащий закренленный на несущей раме корпус, подвижно установленный относительно него и соединенный с траверсой, навешиваемой на грузоподъемную машину, стакан с прорезью и подвижно установленный в корпусе с возможностью размещения в упомянутой прорези фиксирующий палец, кинематически связанный со стаканом 1. Однако известный механизм фиксации недостаточно надежен в работе из-за возможности проворачивания храпового колеса с фиксирующим пальцем больще, чем на один зуб. Цель изобретения - повышение надежности работы. Цель достигается тем, что механизм фиксации захватного устройства, содержащий закрепленный на несущей раме корпус, подвижно установленный относительно него и соединенный с траверсой, навещиваемой на грузоподъемную машину, стакан с прорезью и подвижно установленный в корпусе с возможностью размещения в упомянутой прорези фиксирующий палец, кинематически связанный со стаканом, снабжен установленным в верхней части корпуса с возможностью ограниченного вертикального перемещения ползуном, выполненным с выступом в верхней его части для взаимодействия со стаканом, и двумя углублениями, установленными в углублениях ползуна с ЕЮЗМОЖНОСтью вертикального перемещения подпружиненными кулачками со скосами в нижней их части, жестко прикрепленными к фиксирующему пальцу крон1итейнами со скосами для взаимодействия со скосами кулачков и упругими пластинами, установленными между ползуном и основанием корпуса с возможностью взаимодействия с боковыми стенками кулачков и кронштейнами, при этом корпус выполнен с возможностью размеидения внутри стакана и на его верхней стенке выполнено отверстие для размещения выступа ползуна, а в боковых стенках - направляющие отверстия для размешения фиксируюшего пальца, установленного с возможностью возвратно-поступательного перемен1ения. На фиг. 1 изображено захватное устройство с механизмом фиксации, обший вид; на фиг. 2 - механизм фиксации, разрез li аксонометрии; на фиг. 3 - то же, в закрытом положении захватного устройства; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - механизм фиксации в момент опускания захвата с грузом; на фиг. 6 - то же, в раскрытом положении захватного устройства; на фиг. 7 - ползун; на фиг. 8 - фиксирующий палец с кронштейнами; на фиг. 9 - кулачок. Механизм фиксации захватного устройства состоит из корпуса 1 и стакана 2, в котором установлен ползун 3, выполненный с выступом а для взаимодействия со стаканом 2, двумя углублениями б для левого 4 и правого 5 кулачков и гнездом в для упругих пластин 6. Другим концом пластины 6 опираются в гнезда г, выполненные в основании корпуса 1. Кулачки 4 и 5 выполнены со скосами (3, взаимодействующими со скосами е кронштейна 7. Цластины 6 установлены с возможностью взаимодействия с кронштейном 7. На кронштейне 7 закреплен фиксирующий палец 8. На левый 4 и правый 5 кулачки воздействуют пружины 9. Корпус 1 жестко закреплен на раме 10 захватного устройства, на этой же раме шарнирно установлены рычаги 11, кинематически связанные со стаканом 2, имеющим скобу для навешивания на крюк грузоподъемного устройства. На верхней стенке корпуса 1 выполнено отверстие ж для размещения выступа а ползуна, а в боковых стенках - направляющие отверстия з для размешения фиксируюп1его пальца 8. В стакане 2 выполнена прорезь и для фиксирующего пальца 8. Устройство работает следующим образом. В исходном положении стакан 2, навешенный на крюк грузоподъемного устройства, находится в верхнем положении. Рычаги 11, шарнирно связанные со стаканом 2, повернуты относительно ра.мы 10 и зажимают груз. Цолзун 3 под действие.м упругих пластин 6 также находится в верхнем положении, фиксирующий палец и кронштейн 7 отведены вправо. Между пластинами 6 и кронштейном 7 имеется зазор. Кронштейн 7 воздействует своим скосом на левый кулачок 4 и, преодолевая усилие пружины 9, поднимает его. Пружина 9, воздействующая на правый кулачок 5, удерживает его ъ нижнем положении и кронштейн 7, взаимодействуюп1ий своим скосом с правым кулачком 5, не препятствует этому. Правый кулачок 5 сопри асается с пластинами 6. При опу.кянии захвата с грузом на поверхность рабочей площадки, стакан 2 онускается, разворачивая р1)1чаги 11 относительно рпмы 10, и освобождают груз. В момент достижения стаканом 2 выступа ползуна 3 против фиксируюшего пальца 8 оказывается npope;ii и в стакане 2. При дальнейшем 1гИ1/1 снии стакан 2 давит на ползун 3 и опускает его. Пластины 6, установленные между ползуном 3 и основанием корпуса 1, теряя стойчивость, прогибаются влево до упора в кронп тейн 7, так как правый кулачок 5 опущен и, находясь в соприкосновении с пластикой 6, препятствует прогибу ее вправо. Диаметр прорези и в стакане 2 больше диаметра фиксируюпюго пальца 8 на величину хода нолииа л.
поэтому при дальнейшем опускании ползуна 3 пластины 6 выдвигают кронштейн 7 с фиксируюш,им пальцем 8 влево, в результате чего фиксируюш,ий палец 8 исключает перемеш,ение стакана 2 относительно корпуса 1. Одновременно кронштейн 7 своими скосами поднимает правый кулачок 5 и выходит из-под левого кулачка 4, но так как еще до момента начала движения кронштейна 7 пластины 6 имели прогиб влево, левый кулачок 4 не опускается.
При подъеме стакан 2 благодаря разности размеров прорези и и фиксатора 8 движется вверх и дает возможность пластинам 6 вернуться в исходное положение. Левый кулачок 4 опускается под действием пружины 9 и соприкасается с пластинами 6.
При следуюш.ем опускании стакана 2 последний снова воздействует на ползун 3, продвигая его вниз. Пластины 6, теряя устойчивость, выгибаются вправо до упора в
кронштейн 7, приобретая необходимую стрелу прогиба для предотврашения движения правого кулачка 5 вниз при выходе из-под него кронштейна 7. Затем, воздействуя на кронштейн 7, пластины 6 продвигают его вправо и выводят фиксирую ций палец 8 из
прорези и стакана 2.
При подъеме происходит возврат механизма в исходное положение. Данная конструкция механизма фиксации позволяет повысить надежность его работы по сравнению с известным.
Фиг.5
ФигЛ
Фиг.5
Фиг.6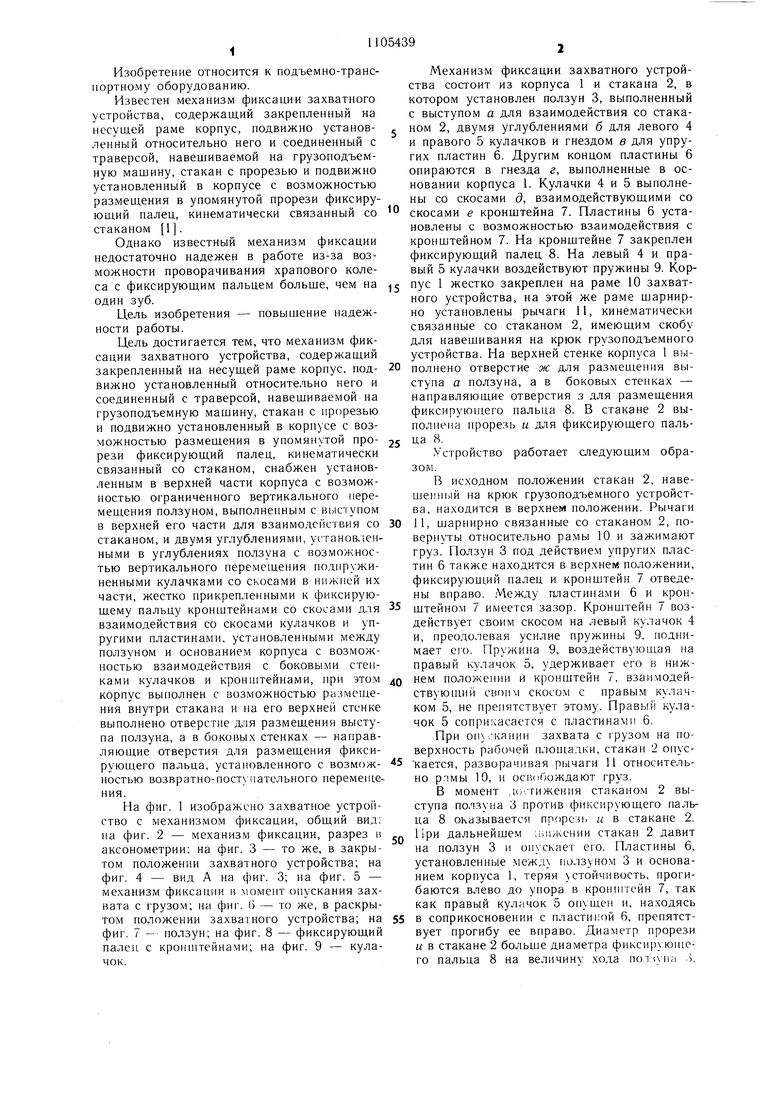
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1079591A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Установка для резки изоляционныхпРОКлАдОК | 1978 |
|
SU845939A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Устройство для обработки протягиванием деталей типа втулки на горизонтально-протяжном станке | 1983 |
|
SU1135568A1 |
| ЛЮК ЗАЩИТНО-ГЕРМЕТИЧЕСКИЙ (ВАРИАНТЫ) | 2008 |
|
RU2374395C1 |
| ПАКЕТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2000 |
|
RU2170976C1 |
| Автоматическое вакуумное захватное устройство | 1988 |
|
SU1588681A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
МЕХАНИЗМ ФИКСАЦИИ ЗАХВАТНОГО УСТРОЙСТВА, содержащий закрепленный на несущей раме корпус, подвижно установленный относительно него и соединенный с траверсой, навешиваемой на грузоподъемную машину, стакан с прорезью и подвижно установленный в корпусе с возможностью размешения в упомянутой прорези фиксирующий палец, кинематически связанный со стаканом, отличающийся тем, что, с целью повышения надежности работы, он снабжен установленным в верхней части корпуса с возможностью ограниченного вертикального перемещения ползуном, выполненным с выступом в верхней его части для взаимодействия со стаканом, и двумя углублениями, установленными в углублениях ползуна с возможностью вертикального перемещения подпружиненными кулачками со скосами в нижней их части, жестко прикрепленными к фиксирующему пальцу кронштейнами со скосами для взаимодействия со скосами кулачков, и упругими пластинами, установленными между ползуном и основанием корпуса с возможностью взаимодействия с боковыми стенками кулачков и кронштейнами, при этом корпус выполнен с возможностью размещения внутри стакана и на его верхней стенке выполнено отверс® тие для размещения выступа ползуна, а в боковых стенках - направляющие отверстия для размещения фиксирующего пальца, установленного с возможностью возвратно-поступательного перемещения. сд оо со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм фиксации захватного устройства | 1973 |
|
SU539821A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
