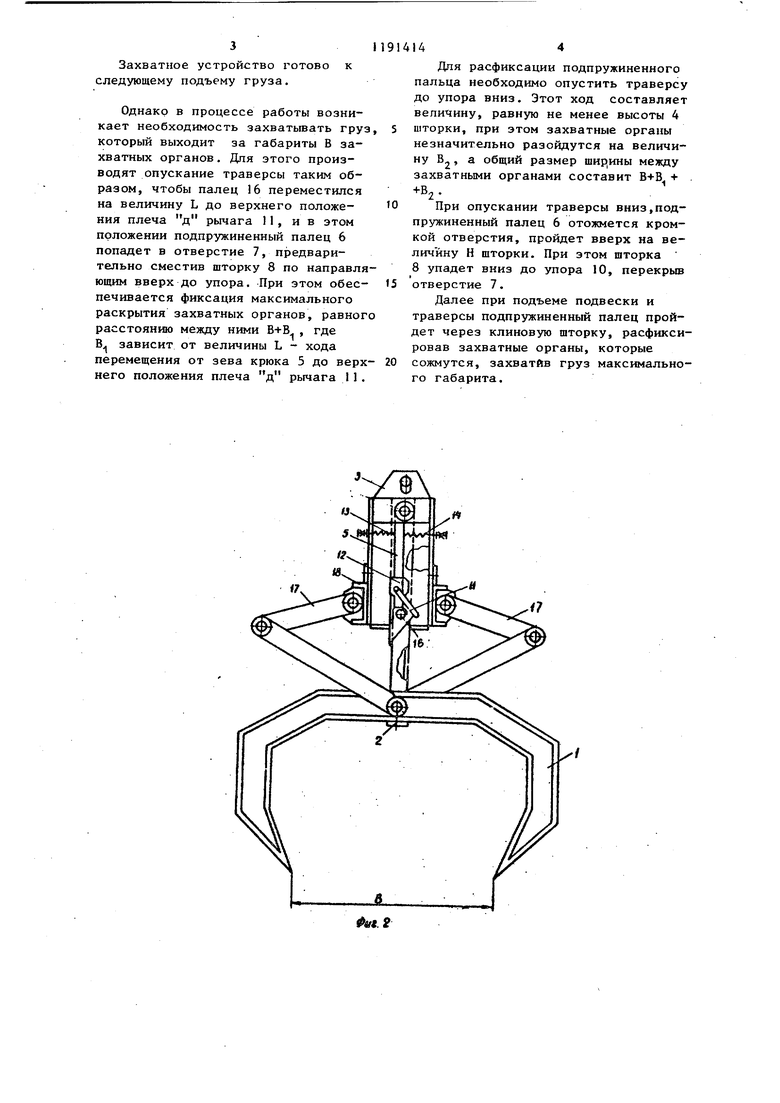
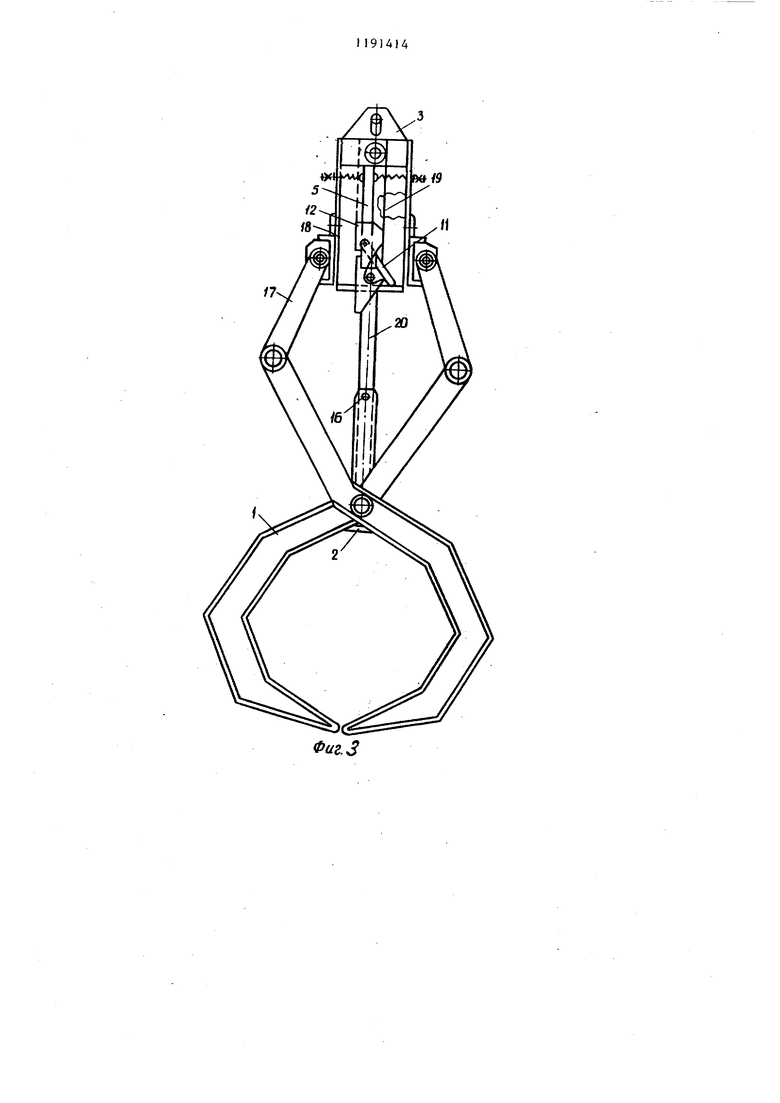
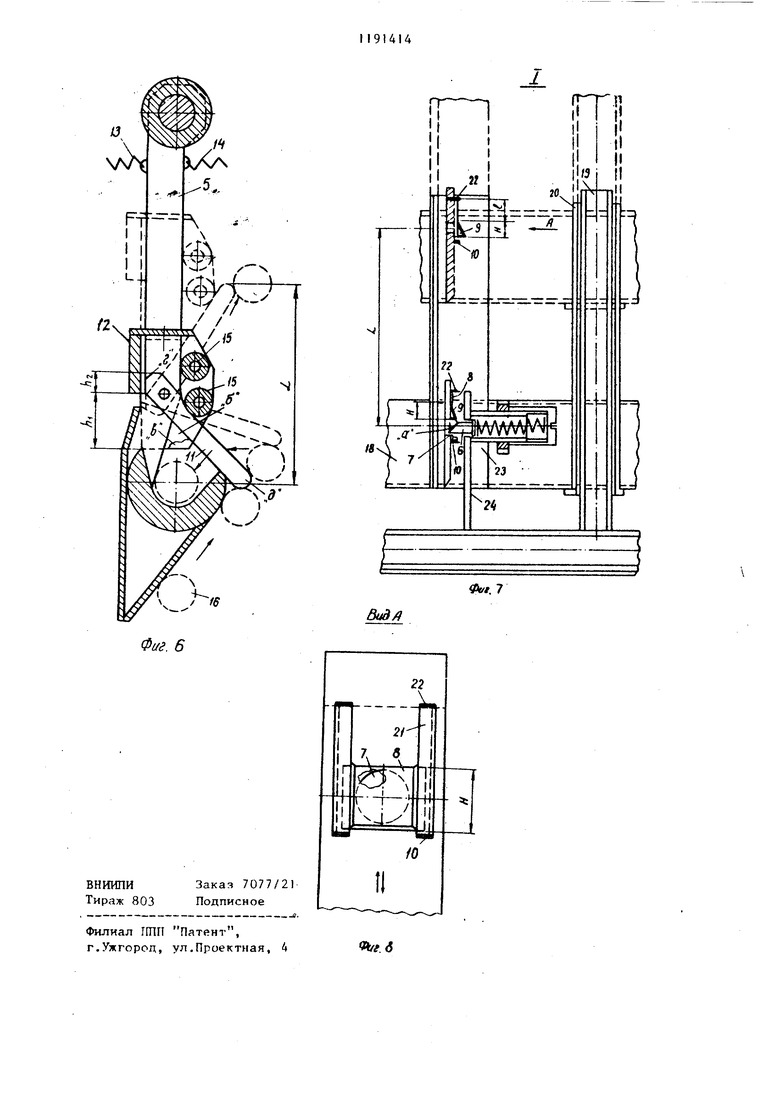
1 Изобретение относится к подъемно-транспортному оборудованию, в частности к механизмам для фиксации рабочих органов захватного устройства. Цель изобретения - повьпиение надежности при работе с грузами различных габаритов. На фиг. 1 изображено захватное устройство с размещенным на нем механизмом для фиксации рабочих органов; на фиг. 2 - то же, в момен фиксации рабочих органов в оптимально раскрытом положении, общий вид; на фиг. 3 - то же, в момент захвата груза; на фиг. 4 - то же, в момент фиксации рабочих органов с помощью подпружиненного пальца; на фиг. 5 - то же, в момент расфиксации рабочих органов от подпружиненного пальца; на фиг. 6 элемент для фиксации несущего элемента относительно подвески; на фиг. 7 - узел I на фиг, 1 (в момент фиксации рабочих органов с помощью подпружиненного пальца); на фиг. 8 вид А на фиг. 7. Механизм для фиксации рабочих ор ганов захватного устройства содержи соединяемый с рабочими органами 1 несущий элемент 2, монтируемый на подвеске 3 грузозахватного устройства, ползун 4, элемент для фиксации несущего элемента относительно подвески, выполненный в виде щарнир но закрепленного на подвеске крюка 5, и размещенный на несущем элемен 2 подпружиненный палец 6. Ползун 4 выполнен с размещенным выше крюка отверстием 7 для пальца 6 и снабже установленной на .нем шторкой 8 для перекрытия отверстия, вьшолненной с клиновьм выступом 9, и размещенн под отверстием 7 упором 10 для што ки, при этом палец 6 вьшолнен со скосом а для взаимодействия с упором 1 о и клиновым выступом 9 шторки 8. На крюке 5 шарнирно закреплен р чаг 11, над которым подвижно устан лен хомут 12 с двумя выступами б и в, расположенными диаметрально противоположно на нижнем его торце Одно плечо рычага 11 выполнено в в кулачка г, взаимодействующего пр работе со стенкой хомута 12, а дру гое плечо д выступает за пределы рычага крюка 5, который подпружине пружинами 13 и 14. 42 Для улучшения перемещения хомута 12 по крюку 5 на хомуте установлены ролики 15. Крюк 5 установлен с возможностью взаимодействия с пальцем 16, размещенным на несущем элементе 2, рабочие органы 1 представляют собой клещевины, щарнирно закрепленные на несущем элементе 2 и шарнирно соединенные тягами 17 с траверсой 18, жестко связанной с подвеской. На траверсе 18 и несущем элементе 2 закреплены направляющие 19 и 20, телескопически связанные между собой. Шторка 8 перемещается в направляющих 21. На ползуне закреплен также упор 22 для ограничения перемещения шторки вверх. Корпус 23 подпружиненного пальца 6 закреплен на стойке 24, которая крепится на несущем элементе 2. Устройство работает следующим образом. В момент фиксации рабочих органов захватного устройства в оптимальном режиме работы крюк 5 механизма иксации находится в зацеплении с пальцем 16. Опуская захватное устройство на груз, клещи охватывают груз по ширине В. При дальнейшем опускании подвески вместе с траверсой палец 16 будет контактировать сначала с выступами б и в хомута, поднимая последний по крюку 5. При этом хомут сползает с кулачка г и таким образом обеспечивает зацепление крюком 5 пальца ,16. Последний поднимет рычаг 11, развернет его вверх до отказа, пройдет плечо .д рычага, который упадет вниз, и при подъеме траверсы с подвеской вверх, захватные органы 1 сомкнутся, захватив груз. После транспортировки и установки груза на место траверса, опускаясь вниз, воздействуя через тяги 17 на захватные органы, раскрывает их до определенного положения (сначала палец 16 будет скользить по нижнему скосу крюка, далее упрется в конец плеча д рычага I1, отклонит его вверх до момента, когда кулачок г упрется в стенку хомута 12, заклинив его). Образующееся окно между крюком и плечом д рычага позволит войти в зев крюка 5 пальцу 16, фиксируя оптимальное раскрытие рабочих орга- . нов. Захватное устройство готово следующему подъему груза. Однако в процессе работы возникает необходимость захватьшать гру который выходит за габариты В захватных органов, Для этого производят опускание траверсы таким образом, чтобы палец 16 переместился на величину L до верхнего положения плеча д рычага 11, ив этом положении подпружиненный палец 6 попадет в отверстие 7, предварительно сместив шторку 8 по направл ющим вверх до упора. При этом обес печивается фиксация максимального раскрытия захватных органов, равно расстоянию между ними В+В , где В зависит от величины L - хода перемещения от зева крюка 5 до вер него положения плеча д рычага 11 144 Для расфиксации подпружиненного пальца необходимо опустить траверсу до упора вниз. Этот ход составляет величину, равную не менее высоты 4 шторки, при этом захватные органы незначительно разойдутся на величину В , а общий размер ширины между захватными органами составит В+В + +В2 . При опускании траверсы вниз,подпружиненный палец 6 отожмется кромкой отверстия, пройдет вверх на величину Н щторки. При этом шторка 8 упадет вниз до упора 10, перекрыв отверстие 7, Далее при подъеме подвески и траверсы подпружиненный палец пройдет через клиновую шторку, расфиксировав захватные органы, которые сожмутся, захватив груз максимального габарита.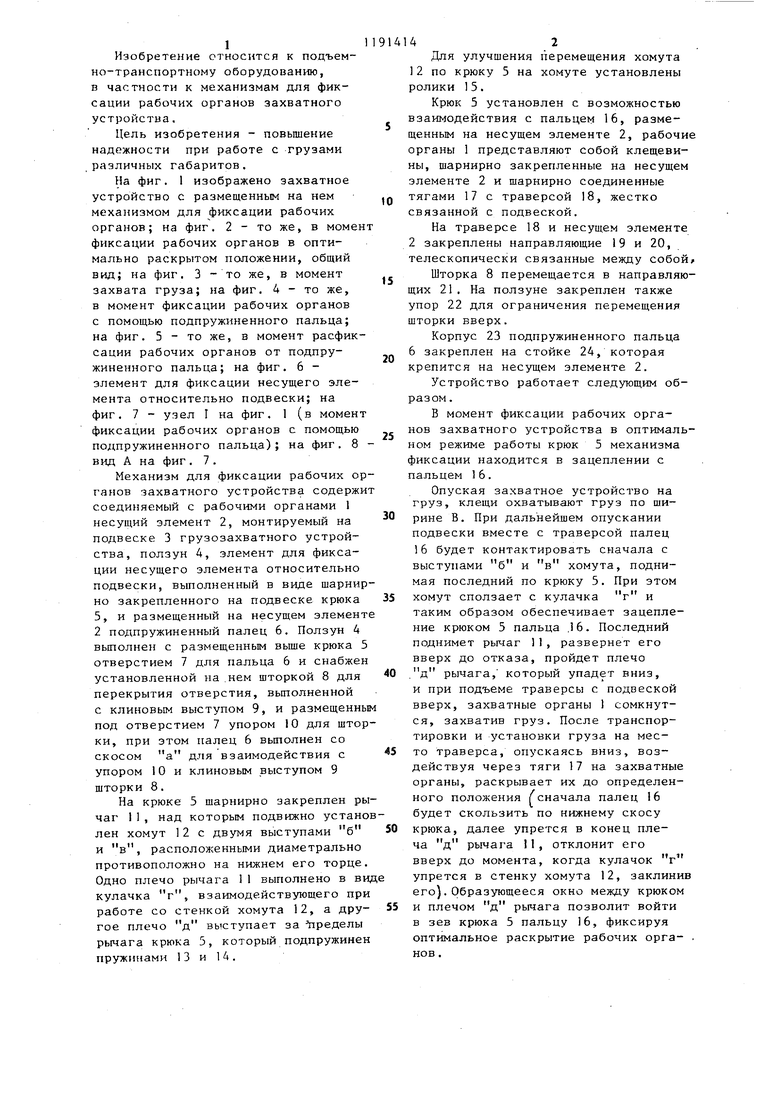
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Автоматическое устройство к грузозахватному органу | 1980 |
|
SU918243A1 |
| Автоматическое устройство к грузозахватному органу | 1982 |
|
SU1093679A2 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Механизм фиксации захватного устройства | 1983 |
|
SU1105439A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
МЕХАНИЗМ ДЛЯ ФИКСАЦИИ РАБОЧИХ ОРГАНОВ ЗАХВАТНОГО УСТРОЙСТВА, содержащий соединяемый с рабочими органами несущий элемент, монтируемый на подвеске грузозахватного устройства ползун, элемент для фиксации несущего элемента относительно подвески и размещенный на несущем элементе подпружиненный палец, отличающийся тем, что, с целью повышения надежности при работе с грузами различных габаритов, ползун вьшолнен с размещенным выше элемента для фиксации несущего элемента относительно подвески отверстием для пальца и снабжен установленной на нем шторкой для перекрытия отверстия, вьшолненной с i клиновым выступом, и размещенным под отверстием упором для шторки, (Л при этом палец выполнен со скосом для взаимодействия с упором и клиновым выступом шторки. со IS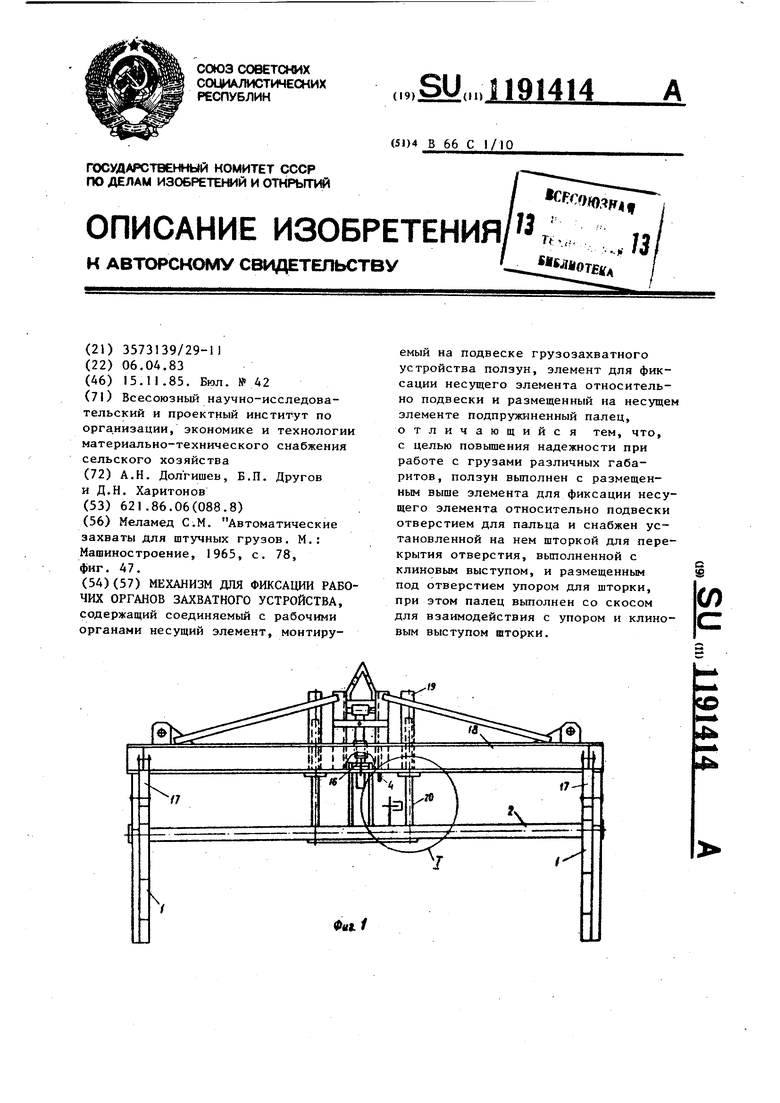
Mr
/7
17
Фиг.З
W
У1.
13
Д(
ф1/1. 7
ВидА
| Меламед С.М | |||
| Автоматические захваты для штучных грузов | |||
| М.: Машиностроение, 1965, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
