Изобретение относится к геодезическому приборостроению, в частности к устройствам для определения превышений с помощью сооб щакнцихся .сосудов, наполненных однородной жидкостью, и может быть использовано для систематических наблюдений за осадками фундаментов, инженерных сооружений и технологического оборудовани Известен гидростатический нивелир содержащий сообщающиеся сосуды с зле тропроводящей жидкостью, установленные в контролируемых или нивелируемых точках сооружений. Над жидкостью установлены датчики-иголки, снабженные телеуправляемым приводом 1 J. Однако эта система дорогостоящая так как каждый датчик должен быть снабжен приводом, диапазон измеряемых превышений маленький (не более 10 мм), а также трудно осуществить полную автоматизацию системы. Наиболее близка к предлагаемой по технической сущности и достигаемому результату система гидродинамнческого нивелирования, содержащая подъемно-преобразующий узел с устано ленным на нем уравнительным баком, соединенным шлангами с датчиками уровня, и блок управления, состоящий из соединенных с электродами соответствующих датчиков входных устройств, канальных двоично-десятичных счетчиков, соединенны { с селектором с подключенной к нему схемой выбора информации, дешифратора, индикатора схемы управления подъемно-преобразую щим узлом, схемы блокировки Стоп и схем селектора Стоп 2. В известном устройстве определяемое превышение определяется формулой ЛН. Сг(Н ,-Н,)-йЬ1 Т 11 1 где С коэффициент перераспределения жидкости в системе; цена одного импульса, MMJ количество импульсов соотве ствующих 1-му и i-му каналам поправка за время установле ния уровня жидкости во всей системе. Произведение Ct для данной систе мы является величиной постоянной, йЬ- зависит от расстояния датчиков до уравнительного бака, параметров внешней среды (температура, влажность, давление и т.д.), скорости подъема уравнительного бака; измене9НИН химического состава жидкости и т.д. При необходимости определения превышений с большей точностью приходится учитывать одновременно вышеуказанные факторы, вычисление которых практически возможно только с определенной погрешностью, что приводит к увеличению погрешности измерения превьш1ений данной системы. Кроме того, по мере поднимания бака ж щкocть постепенно из бака переливается в систему. Это приводит к изменению количества жидкости в баке, соответственно к изменению и веса бака. Вследствие этого скорость подъема уравнительного бака во время измерения не остается постоянной, что приводит к изменению угла наклона пьезометрической, линии между датчиками . Цель изобретения - повьшхение точности измерений превьш1ений с уменьшением затрат времени на измерение. Для достижения поставленной цели в системе гидродинамического нивелирования, содержащей подъемно-преобразующий узел с установленным на нем уравнительным баком, соединенным шлангами с датчиками уровня, и блок управления, состоящий из соединенных с электродами соответствующих датчиков входных устройств, канальных двоичнодесятичных счетчиков, соединенных с селектором с подключенной к нему схемой выбора информации, дешифратора, вход которого соединен с выходом селектора, индикатора, вход которого соединен с выходом дешифратора, схемы управления подъемно-преобразующим узлом, и схем селектора Стоп, вход которых соединен с выходами канальных двоично-десятичных счетчиков, подъемно-преобразующий узел снабжен стабилизатором скорости, соединенным со схемой управления подъемно-преобразующим узлом, а блок управления снабжен делителями 1:2, включенными между входными устройствами и канальными двоично-десятичными счетчиками, схемой дополнительного подъема, включенной между схемами селектора Стоп и схемой управления подъемно-преобразующим узлом с подключенной к ней введенной схемой запуска подъемнопреобразующего узла. Стабилизатор скорости выполнен из последовательно соединенных генератора стабильной частоты, схемы сравнения и цифроаналогового преобразователя, причем второй вход схемы сравнения соединен с выходом подъемнопреобразуюгиего узла.
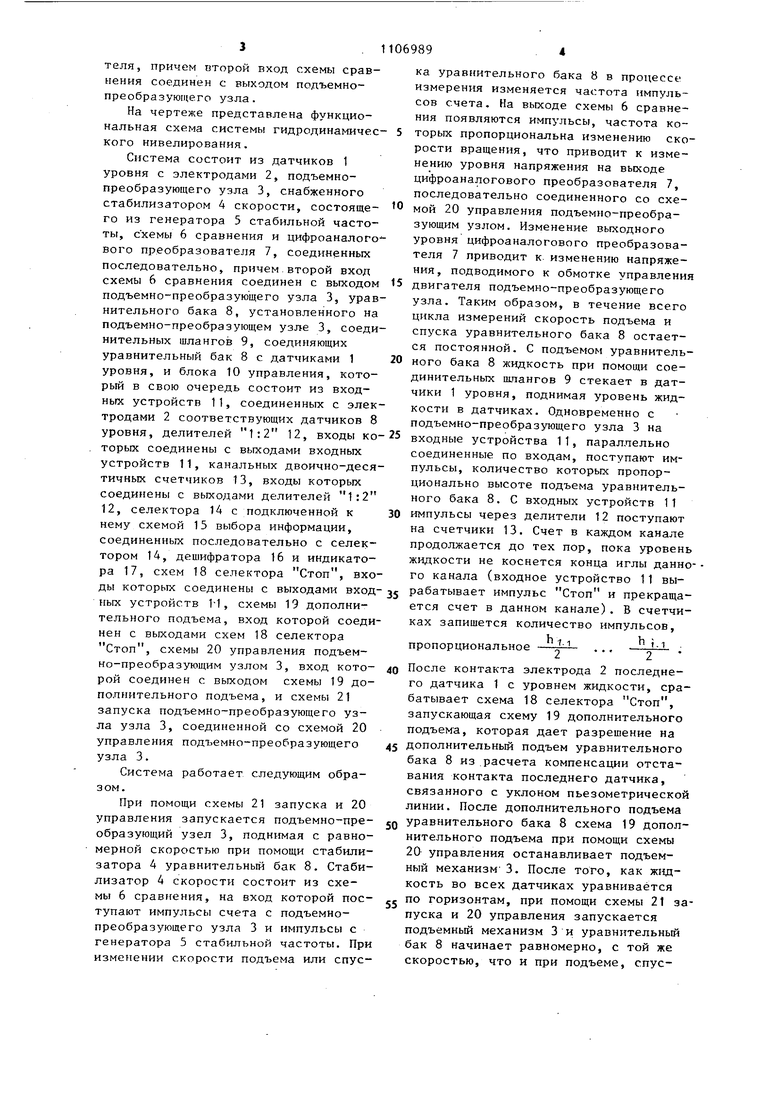
На чертеже представлена функциональная схема системы гидродинамического нивелирования.
Система состоит из датчиков 1 уровня с электродами 2, подъемнопреобразующего узла 3, снабженного стабилизатором 4 скорости, состоящего из генератора 5 стабильной частоты, схемы 6 сравнения и цифроаналого вого преобразователя 7, соединенных
последовательно, причем второй вход схемы 6 сравнения соединен с выходом подъемно-преобразующего узла 3, уравнительного бака 8, установленного на подъемно-преобразующем узле 3, соединительных шлангов 9, соединяющих уравнительный бак 8 с датчиками 1 уровня, и блока 10 управления, который в свою очередь состоит из входных устройств 11, соединенных с электродами 2 соответствующих датчиков 8 уровня, делителей 1:2 12, входы которых соединены с выходами входных устройств 11, канальных двоично-десятичных счетчиков 13, входы которых соединены с выходами делителей 1:2 12, селектора 14 с подключенной к нему схемой 15 выбора информации, соединенных последовательно с селектором 14, дешифратора 16 и индикатора 17, схем 18 селектора Стоп, входы которых соединены с выходами входных устройств М, схемы 19 дополнительного подъема, вход которой соединен с выходами схем 18 селектора Стоп, схемы 20 управления подъемно-преобразующим узлом 3, вход которой соединен с выходом схемы 19 дополнительного подъема, и схемы 21 запуска подъемно-преобразующего узла узла 3, соединенной со схемой 20 управления подъемно-преобразующего узла 3.
Система работает следующим образом.
При помощи схемы 21 запуска и 20 управления запускается подъемно-преобразующий узел 3, поднимая с равномерной скоростью при помощи стабилизатора 4 уравнительный бак 8. Стабилизатор 4 скорости состоит из схемы 6 сравнения, на вход которой поступают импульсы счета с подъемнопреобразующего узла 3 и импульсы с генератора 5 стабильной частоты. При изменении скорости подъема или спуска уравнительного бака 8 в процессе измерения изменяется частота импульсов счета. На вьпходе схемы 6 сравнения появляются импульсы, частота которых пропорциональна изменению скорости вращения, что приводит к изменению уровня напряжения на вькоде цифроаналогового преобразователя 7, последовательно соединенного со схемой 20 управления подъемно-преобразующим узлом. Изменение выходного уровня цифроаналогового преобразователя 7 приводит к изменению напряжения, подводимого к обмотке управления
двигателя подъемно-преобразующего узла. Таким образом, в течение всего цикла измерений скорость подъема и спуска уравнительного бака 8 остается постоянной. С подъемом уравнительного бака 8 жидкость при помощи соединительных шлангов 9 стекает в датчики 1 уровня, поднимая уровень жидкости в датчиках. Одновременно с подъемно-преобразующего узла 3 на
входные устройства 11, параллельно соединенные по входам, поступают импульсы, количество которых пропорционально высоте подъема уравнительного бака 8. С входных устройств 11
импульсы через делители 12 поступают на счетчики 13. Счет в каждом канале продолжается до тех пор, пока уровень жидкости не коснется конца иглы данного канала (входное устройство 11 вырабатывает импульс Стоп и прекращается счет в данном канале). В счетчиках запишется количество импульсов,
пропорциональное . ., - ,
После контакта электрода 2 последнего датчика 1 с уровнем жидкости, срабатывает схема 18 селектора Стоп, запускающая схему 19 дополнительного подъека, которая дает разрешение на
дополнительный подъем уравнительного бака В из расчета компенсации отставания контакта последнего датчика, связанного с уклоном пьезометрической линии, После дополнительного подъема
уравнительного бака 8 схема 19 дополнительного подъема при помощи схемы 20 управления останавливает подъемный механизм 3. После того, как жидкость во всех датчиках уравнивается
по горизонтам, при помощи схемы 21 запуска и 20 управления запускается подъемный механизм 3 и уравнительный бак 8 начинает равномерно, с той же скоростью, что и при подъеме, спус$: 11 каться вниз. После отрыва уровня жидкости от конца электрода входные устройства 11 открываются и счетные импульсы через делители 12 поступают на вход счетчиков 13, суммируясь с информацией, записанной при подъеме вверх. После того, как уравнительный бак 8 дойдет до первоначального уровня (уровень О), подъемный механизм 3 останавливается. При обратном ходе уравнительного бака к информации, записанной в счетчиках 13, суммируется информация, пропорциональная hi. 7 Информация с выходов счет... 2 чиков 13 поступает на вход селектора 14. Последовательно схемой 15 выбора информация счетчиков 13 через дешифратор 16 высвечивается на индикаторе в виде количества импульсов, h1 1 +bi2 пропорциональных ... Учитывая, что во время одного цикла внешние атмосферные условия, а также скорость переме щения жидкости в системе не меняются то углы наклона сС + пьезометрической линии при подъеме и спуске равнь. При повторном цикле, произведенном через некоторое время, уГлы 9 наклона возможно будут отличаться от первого цикла, но все равно внутри одного цикла будут равны. Поэтому во всех циклах расстояния от нулево го уровня жидкости до конца электродов определяются следующими выражениями: bl. ч .2 2 hi.1 +hi.2 При одинаковом расстоянии между концом электрода и дном во всех датчиках уровня превьшение между 1-ми 1-м датчиками определяется по формуле,.ст(.). (3) В формуле (3) отсутствует поправочный коэффициент, что приводит к увеличению точности измерения превышений (почти в два раза). Вследствие компенсации наклона пьезометрической линии при подъеме вверх и вниз появляется возможность увеличения скорости (5-10 раз) подъема и опускания бака, что приводит к уменьшению времени одного цикла измерений. Применение стабилизатора скорости приводит к увеличению точности измерений превышений.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программной закалки длинномерных изделий | 1980 |
|
SU865942A1 |
| Многоканальное измерительно-регистрирующее устройство (его варианты) | 1982 |
|
SU1038807A1 |
| Способ гидродинамического нивелирования | 1981 |
|
SU1044975A1 |
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В ДАЛЬНОМЕРАХ | 1996 |
|
RU2101747C1 |
| Устройство для контроля времени работы оборудования | 1990 |
|
SU1815664A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ ОТ ЭВМ | 1992 |
|
RU2010292C1 |
| Фазометр мгновенных значений | 1981 |
|
SU980015A1 |
| Устройство для управления погружной насосной установкой | 1982 |
|
SU1281747A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1987 |
|
SU1474061A1 |

1, СИСТЕМА ГИДРОДИНАМИЧЕСКОГО НИБЕЛИРОВАНИЯ, содержащая подъемнопреобразующий узел с установленным на нем уравнительным баком, соединенным щлангами с датчиками уровня, и блок управления, состоящий из соединенньЕХ с электродами соответствующих датчиков входных устройств, канальных двоично-десятичных счетчиков, соединенных с селектором с подключенной к нему схемой выбора информации, дешифратора, вход которого соединен с выходом селектора, индикатора, вход которого соединен с выходом дешифратора, схемы управления подъемно-преобразующим узлом, и схем селектора Стоп, вход которых соединен с выходами канальных двоично-десятичных счетчиков, отличающаяся тем, что, с целью повышения точности и уменьшения времени измерений, подъемно-преобразующий узел снабжен стабилизатором скорости, соединенным со схемой управления подъемно-преобразующим узлом, а блок управления снабжен делителями 1:2, включенными между входными устройствами и канальными двоично-десятичными счетчиками, схемой дополнительного подъi ема, включенной между схемами селектора Стоп и схемой управления подъСЛ емно-преобразующим узлом с подключенной к ней введенной схемой запуска подъемно-преобразующего узла. 2. Система поп.1, отличающаяся тем, что стабилизатор скорости выполнен из последовательно соединенных генератора стабильной частоты, схемы сравнения и цифроаналогового преобразователя, причем О5 второй вход схемы сравнения соединен х с выходом подъемно-преобразующего ас со узла.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| -•-СОЮЗНАЯ st'C'^ ипГ':Й1Й1;чса:лГ.1:ч.зШ | 0 |
|
SU393577A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Синанян P.P | |||
| и др | |||
| Модернизированная система гидродинамического нивелирования с электронно-цифровым счетчиком | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| АРМ | |||
| НИНТИ, Ереван, 1982 | |||
