(21)4211516/29-03
(22)16.03.87
(46) 23.04.89. Бюл. № 15
(71)Конотопский электромеханический завод «Красный металлист
(72)Н. П. Матвиенко и А. Н Марищенко
(53)621.876.113(088.8)
(56)Авторское свидетельство СССР № 1216116, кл. В 66 В 3/02, 1982.
(54)УСТРОЙСТВО ЦИФРОВОЙ ИНДИКАЦИЙ ПОЛОЖЕНИЯ СОСУДА ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ
(57)Изобретение предназначено для индикации местоположения подъемного при управлении шахтными подъемными машинами. Цель - повышение достоверности выдачи информации о положении сосуда в процессе его движения Устр-во включает датчик- 1 путевых импульсов, реверсивный двоично- десятичный счетчик 2, дифференцирующие блоки 3 и 6, блок 5 формирования действительной скорости подъемной машины, состоящий из генератора 8 эта тиной частоты и двоичного счетчика 4, млшаратор 9, установки 10 заданной скорости машины.
соединенные с выходами источника 1 питания, D-триггеры 7, подключенные к входам коммутаторов 13, и блок 12 индикации. Блок 5 предназначен для определения скорости движения машины и выдает на своем выходе сигналы в двоичном коде, пропорциональные действительной скорости движения сосуда. Эти сигналы сравниваются в компараторах 9 с двоичными сигналами уставок 10 заданной скорости. Дифференцирующие блоки 3 и 6 формируют короткие прямоугольные импульсы по переднему фронту каждого путевого импульса, поступающего с датчика 1. Эти импульсы соответственно обнуляют двоичный счетчик 4 блока 5 и разрешают D-триггерам запоминать информацию, которая поступает на их информационные входы с выходов компараторов 9 Коммутаторы 13 коммутируют сигналы, поступающие на их информационные и синхронизирующие входы с выходов D-триггеров 7 и счетчика 2. Блок 12 индикации преобразует информацию о пути, пройденном сосудом, с двоично-десятичною кода в семисегментный и отображает эту информацию цифровыми индикаторами. 3 ил.
§
(Л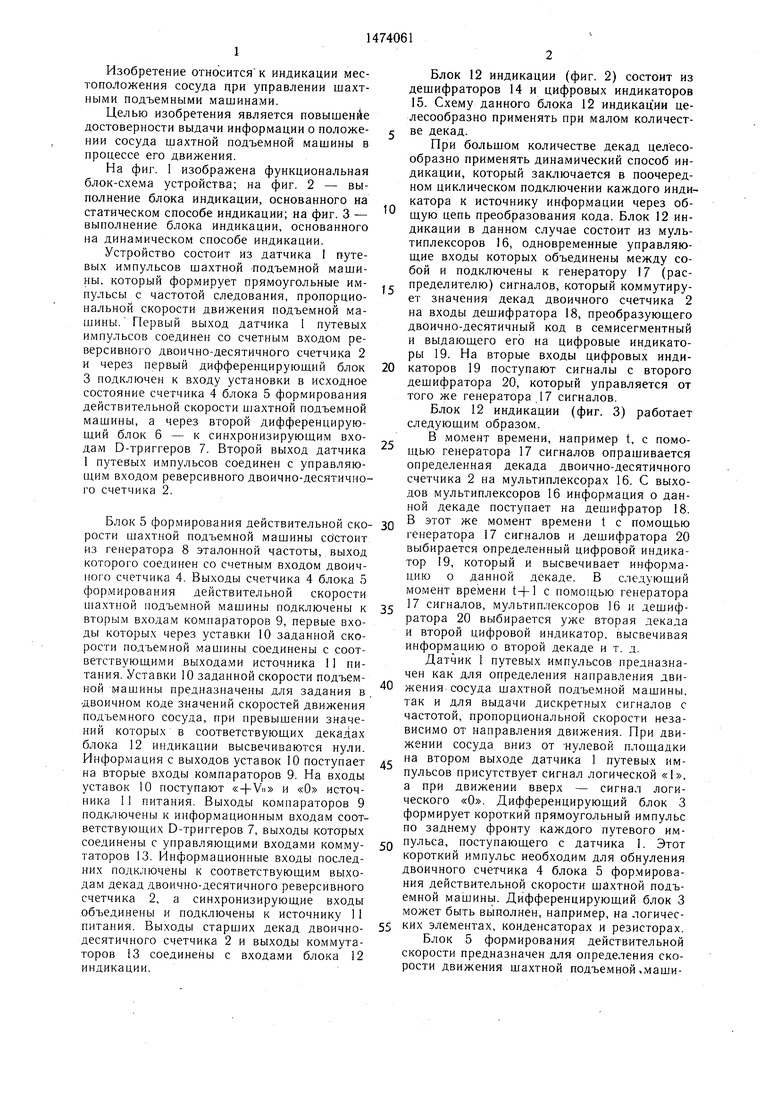
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство индикации местоположения сосуда шахтной подъемной машины | 1986 |
|
SU1411258A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1986 |
|
SU1382797A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1990 |
|
SU1794844A1 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| Устройство для управления шахтной подъемной машиной | 1986 |
|
SU1502451A1 |
| Устройство формирования и регистрации путевых параметров для управления шахтной подъемной установкой | 1989 |
|
SU1835383A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1988 |
|
SU1553501A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПАРАЗИТНЫХ ИМПУЛЬСНЫХ ВОЗМУЩЕНИЙ В СЕТЯХ ЭЛЕКТРОПИТАНИЯ С ПЕРЕМЕННЫМ НАПРЯЖЕНИЕМ | 2002 |
|
RU2239201C2 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1989 |
|
SU1745659A1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |
Изобретение предназначено для индикации листоположения подъемного сосуда при управлении шахтными подъемными машинами. Цель - повышение достоверности выдачи информации о положении сосуда в процессе его движения.Устр-во включает датчик 1 путевых импульсов, реверсивный двоично-десятичный счетчик 2, дифференцирующие блоки 3 и 6, блок 5 формирования действительной скорости подъемной машины, состоящий из генератора 8 эталонной частоты и двоичного счетчика 4, компаратор 9, уставки 10 заданной скорости машины, соединенные с выходами источника 11 питания, Д - триггеры 7, подключенные ко входам коммутаторов 13, и блок 12 индикации. Блок 5 предназначен для определения скорости движения машины и выдает на своем выходе сигналы в двоичном коде, пропорциональные действительной скорости движения сосуда. Эти сигналы сравниваются в компараторах 9 с двоичными сигналами уставок 10 заданной скорости. Дифференцирующие блоки 3 и 6 формируют короткие прямоугольные импульсы по переднему фронту каждого путевого импульса, поступающего с датчика 1. Эти импульсы соответственно обнуляют двоичный счетчик 4 блока 5 и разрешают Д - триггерам запоминать информацию, которая поступает на их информационные входы с выходов компараторов 9. Коммутаторы 13 коммутируют сигналы, поступающие на их информационные и синхронизирующие входы с выходов Д - триггеров 7 и счетчика 2. Блок 12 индикации преобразует информацию о пути, пройденном сосудом с двоично-десятичного кода в семисегментный и отображает эту информацию цифровыми индикаторами. 3 ил.
8
J |
4ь
О
оэ
Фые. 1
Изобретение относится к индикации местоположения сосуда при управлении шахтными подъемными машинами.
Целью изобретения является повышение достоверности выдачи информации о положении сосуда шахтной подъемной машины в процессе его движения.
На фиг. 1 изображена функциональная блок-схема устройства; на фиг. 2 - выполнение блока индикации, основанного на статическом способе индикации; на фиг. 3 - выполнение блока индикации, основанного на динамическом способе индикации.
Устройство состоит из датчика 1 путевых импульсов шахтной -подъемной машины, который формирует прямоугольные импульсы с частотой следования, пропорциональной скорости движения подъемной машины. Первый выход датчика 1 путевых импульсов соединен со счетным входом реверсивного двоично-десятичного счетчика 2 и через первый дифференцирующий блок 3 подключен к входу установки в исходное состояние счетчика 4 блока 5 формирования действительной скорости шахтной подъемной машины, а через второй дифференцирующий блок 6 - к синхронизирующим входам D-триггеров 7. Второй выход датчика 1 путевых импульсов соединен с управляющим входом реверсивного двоично-десятичного счетчика 2.
Блок 5 формирования действительной скорости шахтной подъемной машины соЧггоит из генератора 8 эталонной частоты, выход которого соединен со счетным входом двоичного счетчика 4. Выходы счетчика 4 блока 5 формирования действительной скорости шахтной подъемной машины подключены к вторым входам компараторов 9, первые входы которых через уставки 10 заданной скорости подъемной машины соединены с соответствующими выходами источника 11 питания. Уставки 10 заданной скорости подъемной машины предназначены для задания в двоичном коде значений скоростей движения подъемного сосуда, при превышении значений которых в соответствующих декадах блока 12 индикации высвечиваются нули. Информация с выходов уставок 10 поступает на вторые входы компараторов 9. На входы уставок 10 поступают «+Vn и «О источника 11 питания. Выходы компараторов 9 подключены к информационным входам соответствующих D-триггеров 7, выходы которых соединены с управляющими входами коммутаторов 13. Информационные входы последних подключены к соответствующим выходам декад двоично-десятичного реверсивного счетчика 2, а синхронизирующие входы объединены и подключены к источнику 11 питания. Выходы старших декад двоично- десятичного счетчика 2 и выходы коммутаторов 13 соединены с входами блока 12 индикации.
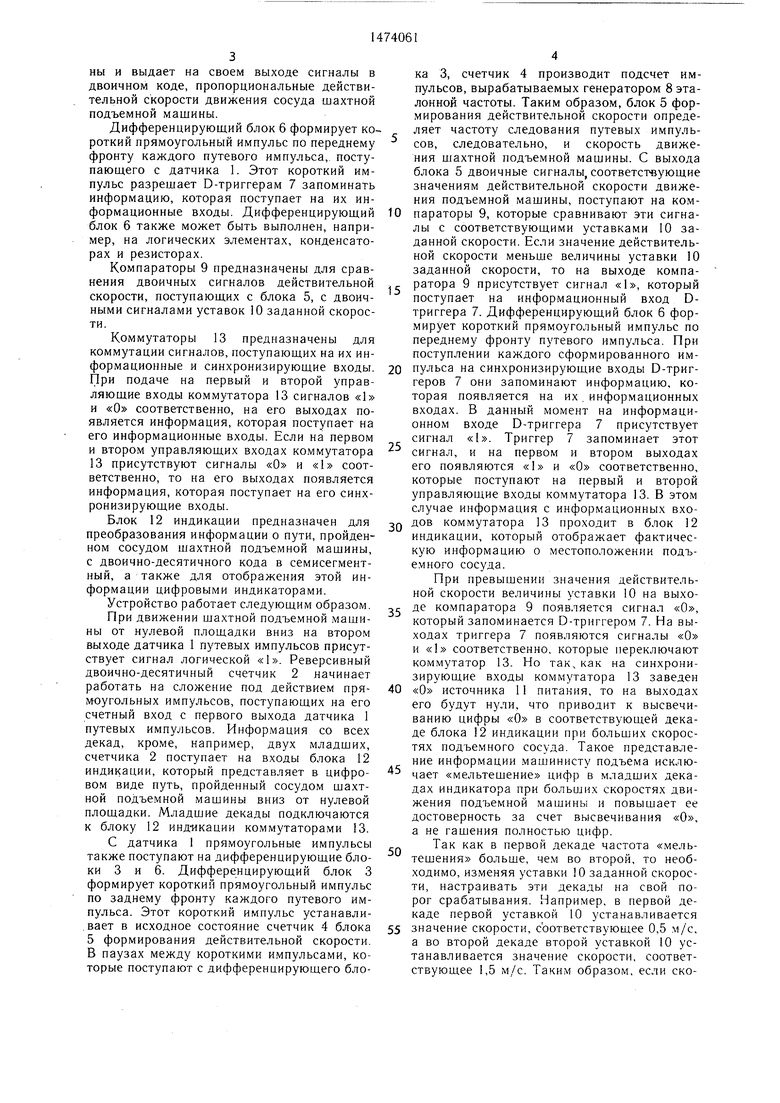
Блок 12 индикации (фиг. 2) состоит из дешифраторов 14 и цифровых индикаторов 15. Схему данного блока 12 индикации целесообразно применять при малом количестве декад.
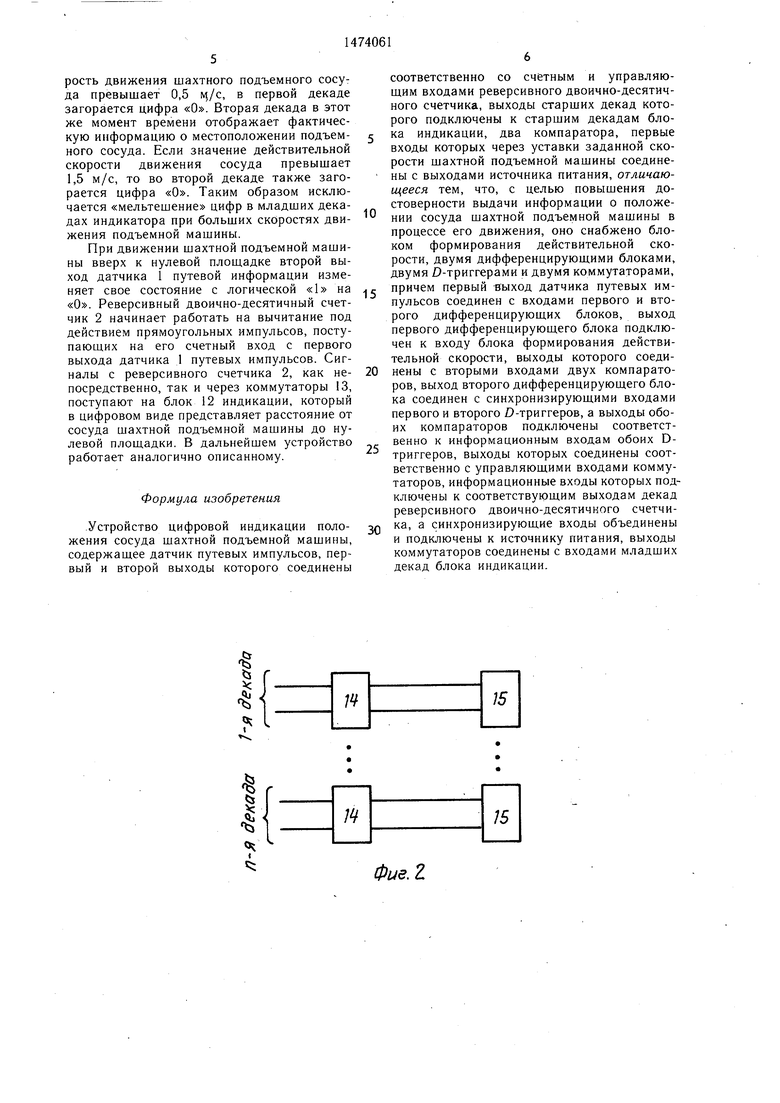
При большом количестве декад целесообразно применять динамический способ индикации, который заключается в поочередном циклическом подключении каждого индикатора к источнику информации через общую цепь преобразования кода. Блок 12 индикации в данном случае состоит из мультиплексоров 16, одновременные управляющие входы которых объединены между собой и подключены к генератору 17 (рас,- пределителю) сигналов, который коммутирует значения декад двоичного счетчика 2 на входы дешифратора 18, преобразующего двоично-десятичный код в семисегментный и выдающего его на цифровые индикаторы 19. На вторые входы цифровых инди0 катеров 19 поступают сигналы с второго дешифратора 20, который управляется от того же генератора 17 сигналов.
Блок 12 индикации (фиг. 3) работает следующим образом.
В момент времени, например t, с помо- щью генератора 17 сигналов опрашивается определенная декада двоично-десятичного счетчика 2 на мультиплексорах 16. С выходов мультиплексоров 16 информация о данной декаде поступает на дешифратор 18.
Q В этот же момент времени t с помощью генератора 17 сигналов и дешифратора 20 выбирается определенный цифровой индикатор 19, который и высвечивает информацию о данной декаде. В следующий момент времени t+1 с помощью генератора
5 17 сигналов, мультиплексоров 16 и дешифратора 20 выбирается уже вторая декада и второй цифровой индикатор, высвечивая информацию о второй декаде и т. д.
Датчик 1 путевых импульсов предназначен как для определения направления дви0 жения сосуда шахтной подъемной машины, так и для выдачи дискретных сигналов с частотой, пропорциональной скорости независимо от направления движения. При движении сосуда вниз от -нулевой площадки с на втором выходе датчика 1 путевых импульсов присутствует сигнал логической «1, а при движении вверх - сигнал логического «О. Дифференцирующий блок 3 формирует короткий прямоугольный импульс по заднему фронту каждого путевого имп пульса, поступающего с датчика 1. Этот короткий импульс необходим для обнуления двоичного счетчика 4 блока 5 формирования действительной скорости шахтной подъемной машины. Дифференцирующий блок 3 может быть выполнен, например, на логичес5 ких элементах, конденсаторах и резисторах. Блок 5 формирования действительной скорости предназначен для определения скорости движения шахтной подъемной .маши
ны и выдает на своем выходе сигналы в двоичном коде, пропорциональные действительной скорости движения сосуда шахтной подъемной машины.
Дифференцирующий блок 6 формирует короткий прямоугольный импульс по переднему фронту каждого путевого импульса, поступающего с датчика 1. Этот короткий импульс разрешает D-триггерам 7 запоминать информацию, которая поступает на их информационные входы. Дифференцирующий блок 6 также может быть выполнен, например, на логических элементах, конденсаторах и резисторах.
Компараторы 9 предназначены для сравнения двоичных сигналов действительной скорости, поступающих с блока 5, с двоичными сигналами уставок 10 заданной скорости.
Коммутаторы 13 предназначены для коммутации сигналов, поступающих на их информационные и синхронизирующие входы. При подаче на первый и второй управляющие входы коммутатора 13 сигналов «1 и «О соответственно, на его выходах появляется информация, которая поступает на его информационные входы. Если на первом и втором управляющих входах коммутатора 13 присутствуют сигналы «О и «1 соответственно, то на его выходах появляется информация, которая поступает на его синхронизирующие входы.
Блок 12 индикации предназначен для преобразования информации о пути, пройденном сосудом шахтной подъемной машины, с двоично-десятичного кода в семисегмент- ный, а также для отображения этой информации цифровыми индикаторами.
Устройство работает следующим образом.
При движении шахтной подъемной машины от нулевой площадки вниз на втором выходе датчика 1 путевых импульсов присутствует сигнал логической «1. Реверсивный двоично-десятичный счетчик 2 начинает работать на сложение под действием пря- моугольных импульсов, поступающих на его счетный вход с первого выхода датчика 1 путевых импульсов. Информация со всех декад, кроме, например, двух младших, счетчика 2 поступает на входы блока 12 индикации, который представляет в цифровом виде путь, пройденный сосудом шахтной подъемной машины вниз от нулевой площадки. Младшие декады подключаются к блоку 12 индикации коммутаторами 13.
С датчика 1 прямоугольные импульсы также поступают на дифференцирующие блоки 3 и 6. Дифференцирующий блок 3 формирует короткий прямоугольный импульс по заднему фронту каждого путевого импульса. Этот короткий импульс устанавливает в исходное состояние счетчик 4 блока 5 формирования действительной скорости. В паузах между короткими импульсами, которые поступают с дифференцирующего бло
5
5
0
0
5
0
5
5
0
ка 3, счетчик 4 производит подсчет импульсов, вырабатываемых генератором бэта- лонной частоты. Таким образом, блок 5 формирования действительной скорости определяет частоту следования путевых импульсов, следовательно, и скорость движения шахтной подъемной машины. С выхода блока 5 двоичные сигналы, соответствующие значениям действительной скорости движения подъемной машины, поступают на компараторы 9, которые сравнивают эти сигналы с соответствующими уставками 10 заданной скорости. Если значение действительной скорости меньше величины уставки 10 заданной скорости, то на выходе компаратора 9 присутствует сигнал «1, который поступает на информационный вход D- триггера 7. Дифференцирующий блок 6 формирует короткий прямоугольный импульс по переднему фронту путевого импульса. При поступлении каждого сформированного импульса на синхронизирующие входы D-триг- геров 7 они запоминают информацию, которая появляется на их информационных входах. В данный момент на информационном входе D-триггера 7 присутствует сигнал «I. Триггер 7 запоминает этот сигнал, и на первом и втором выходах его появляются «1 и «О соответственно, которые поступают на первый и второй управляющие входы коммутатора 13. В этом случае информация с информационных входов коммутатора 13 проходит в блок 12 индикации, который отображает фактическую информацию о местоположении подъемного сосуда.
При превышении значения действительной скорости величины уставки 10 на выходе компаратора 9 появляется сигнал «О, который запоминается D-триггером 7. На выходах триггера 7 появляются сигналы «О и «1 соответственно, которые переключают коммутатор 13. Но такч как на синхронизирующие входы коммутатора 13 заведен «О источника 11 питания, то на выходах его будут нули, что приводит к высвечиванию цифры «О в соответствующей декаде блока 12 индикации при больших скоростях подъемного сосуда. Такое представление информации машинисту подъема исключает «мельтешение цифр в младших декадах индикатора при больших скоростях движения подъемной машины и повышает ее достоверность за счет высвечивания «О, а не гашения полностью цифр.
Так как в первой декаде частота «мельтешения больше, чем во второй, то необходимо, изменяя уставки 10 заданной скорости, настраивать эти декады на свой порог срабатывания. Например, в первой декаде первой уставкой 10 устанавливается значение скорости, соответствующее 0,5 м/с, а во второй декаде второй уставкой 10 устанавливается значение скорости, соответствующее 1,5 м/с. Таким образом, если ско
рость движения шахтного подъемного сосуда превышает 0,5 ц/с, в первой декаде загорается цифра «О. Вторая декада в этот же момент времени отображает фактическую информацию о местоположении подъемного сосуда. Если значение действительной скорости движения сосуда превышает 1,5 м/с, то во второй декаде также загорается цифра «О. Таким образом исключается «мельтешение цифр в младших декадах индикатора при больших скоростях движения подъемной машины.
При движении шахтной подъемной машины вверх к нулевой площадке второй выход датчика 1 путевой информации изменяет свое состояние с логической «1 на «О. Реверсивный двоично-десятичный счетчик 2 начинает работать на вычитание под действием прямоугольных импульсов, поступающих на его счетный вход с первого выхода датчика 1 путевых импульсов. Сигналы с реверсивного счетчика 2, как непосредственно, так и через коммутаторы 13, поступают на блок 12 индикации, который в цифровом виде представляет расстояние от сосуда шахтной подъемной машины до нулевой площадки. В дальнейшем устройство работает аналогично описанному
Формула изобретения
Устройство цифровой индикации положения сосуда шахтной подъемной машины, содержащее датчик путевых импульсов, первый и второй выходы которого соединены
п
0
5
0
0
соответственно со счетным и управляющим входами реверсивного двоично-десятичного счетчика, выходы старших декад которого подключены к старшим декадам блока индикации, два компаратора, первые входы которых через уставки заданной скорости шахтной подъемной машины соединены с выходами источника питания, отличающееся тем, что, с целью повышения достоверности выдачи информации о положении сосуда шахтной подъемной машины в процессе его движения, оно снабжено блоком формирования действительной скорости, двумя дифференцирующими блоками, двумя D-триггерами и двумя коммутаторами, причем первый выход датчика путевых импульсов соединен с входами первого и второго дифференцирующих блоков, выход первого дифференцирующего блока подключен к входу блока формирования действительной скорости, выходы которого соединены с вторыми входами двух компараторов, выход второго дифференцирующего блока соединен с синхронизирующими входами первого и второго D-триггеров, а выходы обоих компараторов подключены соответственно к информационным входам обоих D- триггеров, выходы которых соединены соответственно с управляющими входами коммутаторов, информационные входы которых подключены к соответствующим выходам декад реверсивного двоично-десятичного счетчика, а синхронизирующие входы объединены и подключены к источнику питания, выходы коммутаторов соединены с входами младших декад блока индикации.
15
Фие.2
л
1 & Ъ
/
ч
i |
17
18
19
20
Фие.З
