1 .1
Изобретение Относится к области измерительной техники, в частности , может быть использовано при исследовании поведения живых биологических объектов в проводящей среде (морской воде).
Известно устройство, состоящее из нескольких разнесенных в пространстве приемников и блока совместной обработки результатов измерений направлений на объект.
Однако известное устройство не позволяет определить ориентациюобъекта в пространстве.
Наиболее близким техническим решением к данному изобретению является устройство определения местоположения объекта, содержащее пространственную антенную решетку из N приемных элементов и блок определения максимального сигнала.
Однако известное устройство не позволяет с достаточной точностью определить ориентацию объекта в пространстве.
Цель изобретения - повьшение точности определения ориентации объекта в пространстве.
Для этого в устройство определения местоположения объекта, содержащее пространственную антенную решетку из N приемных элементов и блок определения; максимального сигнала, введен блок нормировки, последовательно соединенные блок определения .минимального сигнала, блок .векторного вычитания, блок вычисления дальности, а также первый и второй блоки памяти и блок векторного суммирования , причем N выходов пространст-. венной антенной решетки соединены с соответствующими входами блока нормировки, N-1 выходов блока нормировки соединены с соответствующими входами блоков определения,максимального и минимального сигналов, первый и второй выходы блока определения максимального сигнала соединены соответственно с первым входом блока векторного суммирования и входом перво блока памяти, а первый и второй выхды первого блока памяти соединены с вторым и третьим входами блоков векторного суммирования и вычитания, вход второго блЬка памяти соединен со вторым выходом блока определения минимального сигнала, а его первый и второй выходы - с четвертым и пя4 .2
тым входами блоков векторного вычитания и суммирования, первые входы, блоков определения максимального и минимального сигнала соединены с шестыми входами соответственно блоков векторного вычитания и суммирования, второй выход блока векторного вычитания и выход блока векторного суммирования соединены соответственно со вторым и третьим входами блока вычисления дальности.
На фиг.1 представлена структурная электрическая схема устройства определения местоположения объекта;
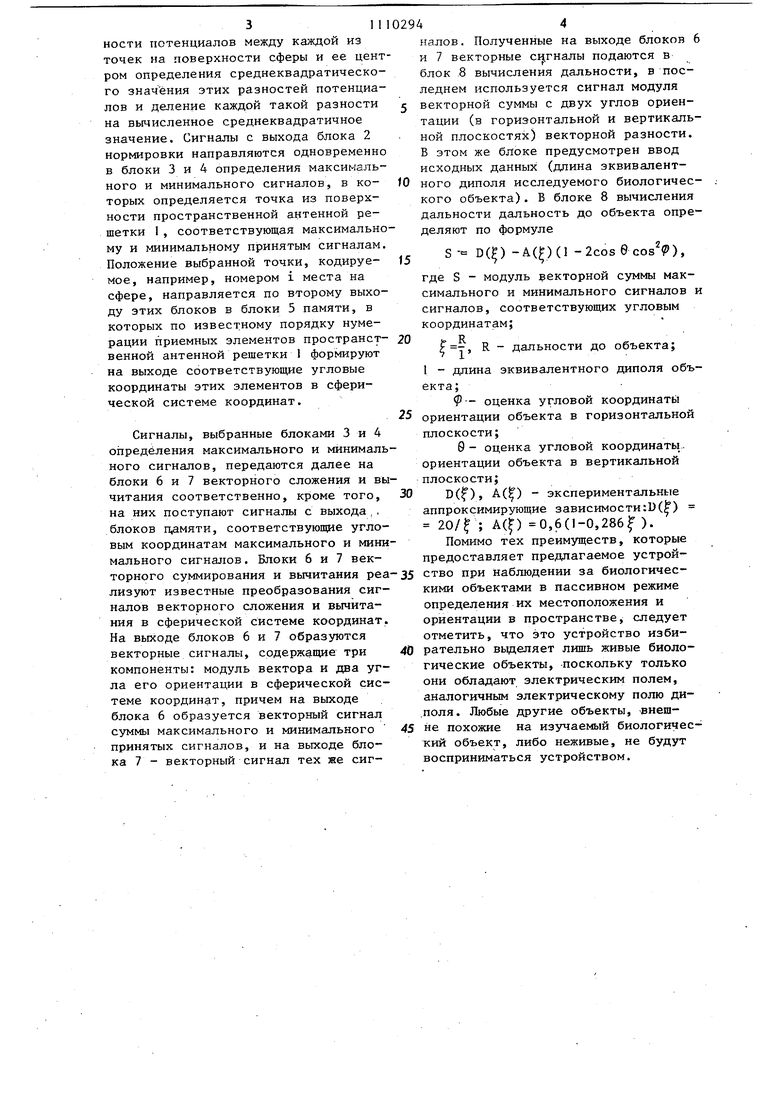
на фиг.2 - пример выполнения блока вычисления дальности. . Предложенное устройство содержит пространственную антенную решетку 1,
блок 2 нормировки, блок 3 определения
максимального сигнала, блок 4 определения минимального сигнала, первьш и второй блоки 5 памяти, блок 6 векторного суммирования, блок 7 векторного вычитания и блок 8 вычисления дальности.
Блок 8 вычисления дальности (фиг,2) содержит нелинейньй преобразователь 9, сумматор 10, инвертор 11 и интегратор 12,
На фиг,1 ., Ц| , б , Ф - угловые координаты местоположения и ориента,ции объекта в сферических координатах.
Устройство работает следующим образом, ,Изобретение основывается на том экспериментальном факте, что любое живое существо «меет между своими
крайними точками тела определенную разность потенциалов и будучи помещенным в проводящую среду (например в морскую воду) индуцирует вокруг себя электрическое поле токов
растекания. Эквипотенциальные линии этого поля на удалении порядка размеров тела животного имеют характер распределения потенциала, аналогичньй распределению потенциала диполя
в вакууме с максимальной разностью . потенциалов до 0,1; В,
Распределение потенциалов в проводящей среде, индуцируемое биологическим объектом, воспринимается
приемными элементами пространственной антенной решетки 1 и передается связанному с каждым приемным элементом блоку 2 нормировки, в котором осуществляются операции взятия раз311
ности потенциалов между каждой из точек на поверхности сферы и ее центром определения среднеквадратического значения этих разностей потенциалов и деление каждой такой разности на вычисленное среднеквадратичное значение. Сигналы с выхода блока 2 нормировки направляются одновременно в блоки 3 и 4 определения максимального и минимального сигналов, в которых определяется точка из поверхности пространственной антенной решетки 1, соответствующая максимальному и минимальному принятым сигналам. Положение выбранной точки, кодируемое, например, номером i места на сфере, направляется по второму выходу этих блоков в блоки 5 памяти, в которых по известному порядку нумерации приемных элементов пространственной антенной решетки 1 формируют на выходе соответствующие угловые координаты этих элементов в сферической системе координат.
Сигналы, выбранные блоками 3 и 4 определения максимального и минимального сигналов, передаются далее на блоки 6 и 7 векторного сложения и вычитания соответственно, кроме того, на них поступают сигналы с выхода , . блоков памяти, соответствующие угловым координатам максимального и минимального сигналов. Блоки 6 и 7 векторного суммирования и вычитания реализуют известные преобразования сигналов векторного сложения и вычитания в сферической системе координат. На выходе блоков 6 и 7 образуются векторные сигналы, содержащие три компоненты: модуль вектора и два угла его ориентации в сферической системе координат, причем на выходе блока 6 образуется векторный сигнал суммы максимального и минимального принятых сигналов, и на выходе блока 7 - векторный сигнал тех же сиг44
налов. Полученные на выходе блоков 6 и 7 векторные С1 гналы подаются в блок 8 вычисления дальности, в последнем используется сигнал модуля
векторной суммы с двух углов ориентации (в горизонтальной и вертикальной плоскостях) векторной разности. В этом же блоке предусмотрен ввод исходных данных (длина эквивалентного диполя исследуемого биологического объекта). В блоке 8 вычисления дальности дальность до объекта определяют по формуле
S- D() -А()(1 -2cos 0cos),
где S - модуль векторной суммы максимального и минимального сигналов и сигналов, соответствующих угловым
координатам;
.. R .
Y, R - дальности до объекта;
I - длина эквивалентного диполя объекта;
р- оценка угловой координаты
ориентации объекта в горизонтальной плоскости;
0 - оценка угловой координаты. ориентации объекта в вертикальной плоскости;
D(f), А() - экспериментальные аппроксимирующие зависимости:D() 20/ ; А(р 0,6(l-0,286f ).
Помимо тех преимуществ, которые предоставляет предлагаемое устройство при наблюдении за биологическими объектами в пассивном режиме определения их местоположения и ориентации в пространстве, следует отметить, что это устройство избирательно вьщеляет лишь живые биолоические объекты, -поскольку только ни обладают электрическим полем, налогичным электрическому полю диоля. Любые другие объекты, нешне похожие на изучаемый биологичесий объект, либо неживые, не будут осприниматься устройством.
П
s f r f f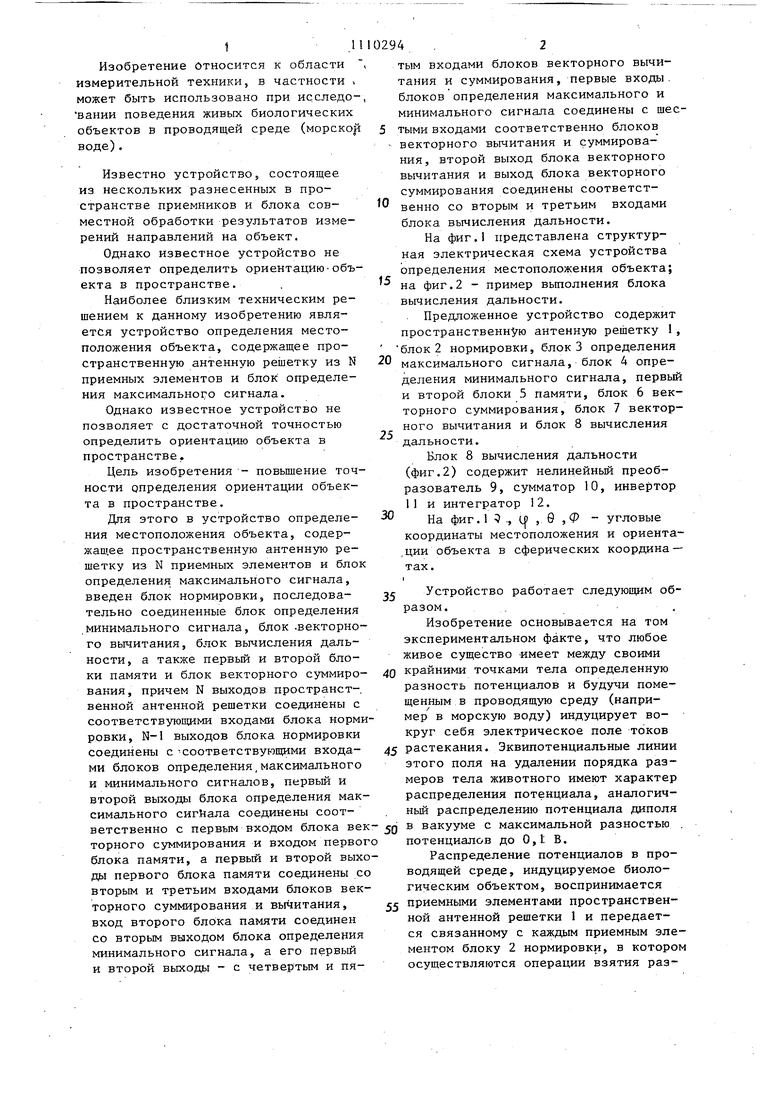
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2553270C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2514197C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2374659C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2014 |
|
RU2547840C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА содержащее пространственную антенную решетку из N приемных элементов и блок определения максимального сигнала, отличающееся тем, 4TOi с целью повышения точности определения ориентации объекта в пространстве, введены блок нормировки, последовательно соединенные блок определения минимально- го сигнала, блок векторного вычитания, блок вычисления дальности, а также первый и второй блоки памяти и блок векторного суммирования, причем N выходов пространственной антенной решетки соединены с соответствующими входами блока нормировки, N-1 выходов блока нормировки соединены с соответствующими входами блоков определения максимального и минимального сигналов, первый и второй выходы блока определения максимального сигнала соединены соответственно с первым входом блока векторного суммирования и входом первого блока памяти, а первый и второй выходы первого блока памяти соединены со вторым и третьим входа- i ми блоков векторного суммирования и вычитания, вход второго блока памяти соединен со вторым выходом блока определения минимального сигнала, а его первый и второй выходы - с четвертым и пятым входами блоков векО) торного вычитания и суммирования, первые выходы блоков определения максимального и минимального сигнала соединены с шес.тыми входами соответственно блоков векторного вычитания и суммирования, второй выход блока векторного вычитания и выход блока векторного суммирования соедине- . ны соответственно со вторым и третьим входами блока вычисления даль--: ности.
J
V
17
. jS.
фг/г/
10
11
в ф
фиг.2
| Принципы навигации | |||
| М., Воениздат, 1968, с | |||
| Способ обработки шкур | 1921 |
|
SU312A1 |
| Патент США № 4131873, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
