Предлагаемое изобретение относится к области радиотехники, в частности к радионавигации, и может быть использовано для определения пространственной ориентации и местоположения подвижного объекта.
Известно устройство по заявке DE №3540212, содержащее не менее двух антенн, расположенных на одной прямой и соединенных с первым переключателем, последовательно соединенные усилитель высокой частоты, преобразователь частоты, ограничитель, перемножающее устройство, считывающее устройство, счетчик и второй переключатель, последовательно соединенные управляемый генератор, делитель частоты на два и накопитель, выход которого соединен с вторым входом перемножающего устройства, выход управляемого генератора соединен с вторым входом считывающего устройства, фазоизмеритель, выход которого соединен с решающим блоком, тактовый генератор, выходы которого соединены с входами управления первого и второго переключателей, выходы второго переключателя соединены с входами каналов фазовой регулировки, причем число каналов равно количеству антенн пеленгатора, а каждый канал фазовой регулировки содержит первый и второй перемножители, входы которых соединены между собой и являются входами каждого канала, выходы перемножителей соединены с входами первого и второго сумматоров, выходы которых соединены с входами третьего перемножителя, выход которого подключен к последовательно соединенным фильтру, генератору преобразованной частоты и устройству фазового сдвига, выход которого соединен со вторым входом второго перемножителя, второй вход первого перемножителя соединен с выходом генератора преобразованной частоты, выходы первого и второго сумматоров одного из каналов фазовой регулировки соединены через квадраторы с входами третьего сумматора, выход которого соединен с третьим переключателем, выходы которого через первый и второй фильтры нижних частот соединены с блоком управления генератором, выход которого соединен с входом управляемого генератора, выходы генераторов преобразованной частоты первого и второго каналов фазовой регулировки соединены с входами фазоизмерителя.
Данное устройство обеспечивает ориентирование объекта в пространстве за счет измерения фазовых сдвигов сигналов, принимаемых от спутников радионавигационной системы на разнесенные антенны. При этом сигналы от всех антенн последовательно преобразуются в одном приемном тракте, поступая на него через переключатель, управляемый тактовым генератором.
Таким образом, в данном устройстве узлы приемного тракта вносят одинаковые погрешности в сигнал от каждой антенны, которые могут быть учтены при дальнейшей обработке.
Недостатком данного устройства является уменьшение времени доступа к сигналам антенн на интервале измерения, что означает потерю энергии сигнала, уменьшение отношения сигнал/шум, а следовательно, возрастание случайной составляющей погрешности измерения. Также данное устройство не обладает защитой от любой помехи, попавшей в частотную полосу приема антенн, что делает устройство неработоспособным в условиях воздействия помех.
Известно устройство по патенту RU №2425393 [1], обладающее функцией определения пространственной ориентации объекта, содержащее N разнесенных в пространстве отдельных антенн, N малошумящих усилителей, N модуляторов, сумматор, блок обработки группового сигнала, формирователь модуляционных последовательностей и демодулятор группового сигнала, причем каждые соответствующие из N антенн, малошумящий усилитель и модулятор соединены последовательно, выход каждого из N модуляторов подключен к соответствующему входу сумматора, который последовательно соединен с приемным каналом, блоком обработки группового сигнала, демодулятором группового сигнала и вычислителем направления, вход формирователя модуляционных последовательностей является вторым выходом приемного канала, а каждый из N его выходов соединен с управляющим входом соответствующего модулятора и с соответствующим управляющим входом демодулятора группового сигнала, где N≥3.
Данное устройство обеспечивает ориентирование объекта в пространстве за счет вычисления разности фаз прихода сигнала одного и того же спутника на разнесенные в пространстве антенны. Оно позволяет использовать всю энергию сигнала, поэтому имеет практически максимально возможное отношение сигнал/шум при минимальной случайной погрешности и малую систематическую погрешность за счет обработки сигналов всех спутников путем преобразования их в групповой сигнал в одном блоке обработки.
Недостатком данного устройства является отсутствие блоков анализа наличия и последующего исключения (компенсации) из принятого сигнала помех, попадающих в полосу приема антенн, а также невозможность формирования избирательных диаграмм направленности для формирования минимумов чувствительности диаграмм направленности антенн в направлении прихода помех. Это делает устройство неработоспособным в условиях воздействия помех, попадающих в полосу приема антенн.
Ближайшим к заявляемому техническому решению является устройство для определения пространственной ориентации объекта по сигналам Глобальной навигационной системы GPS в условиях воздействия помех (патент US №6598009), содержащее блок антенной решетки с аналоговыми трактами приема и обработки сигналов по числу элементов решетки, блок равносигнальных угловых измерений, на вход которого подаются оцифрованные сигналы из трактов приема и обработки сигналов блока антенной решетки, блок определения пространственной ориентации, входом соединенный с выходом блока равносигнальных угловых измерений, а его выход является выходом данных о пространственной ориентации объекта. Также в известное устройство входит блок адаптивной компенсации, последовательно соединенный с GPS-приемником, выход которого является выходом данных о местоположении объекта, его скорости и системном времени, а его входом является навигационный сигнал, очищенный от помех в блоке адаптивной компенсации, входом которого также являются оцифрованные сигналы из трактов приема и обработки сигналов блока антенной решетки.
В данном устройстве определение пространственной ориентации происходит путем вычисления угловых направлений прихода сигнала от GPS-спутников, координаты которых, характер движения и уровни излучаемых сигналов известны. А подавление помехи, за которую принимаются все сигналы, больше определенного уровня, попавшие в полосу приема антенн, производится путем формирования минимальной чувствительности диаграммы направленности в направлении прихода такой помехи с помощью адаптивной обработки сигнала, принятого каждым элементом антенной решеткой и вычислением угла прихода помехи. Подробное описание работы устройства приведено [2].
К недостаткам известного устройства следует отнести наличие нескольких приемных трактов обработки сигналов по числу элементов антенной решетки, которое может составлять до нескольких десятков и более, что существенно усложняет устройство, повышает его габариты и стоимость, а реальная неидентичность разных каналов приводит к дополнительным погрешностям в определении параметров пространственной ориентации объекта. Наличие такого же числа неидентичных аналого-цифровых преобразователей (АЦП), которыми заканчивается каждый тракт приема и обработки сигналов (причины: технологический разброс параметров АЦП, запаздывание прихода тактовой частоты на разные АЦП и др.), также вносит дополнительную фазовую и амплитудную погрешности в сигнал от антенн. Таким образом, даже при эффективном подавлении помех данное устройство не может обеспечить низкую погрешность определения не только пространственной ориентации, но и стандартных параметров навигации - местоположения и скорости объекта. Также известным устройством нет возможности обеспечить прием сигналов от другой Глобальной навигационной системы - ГЛОНАСС.
В основу изобретения положена задача повышения точности определения пространственной ориентации объекта по сигналам навигационных спутников ГЛОНАСС/GPS в условиях воздействия помех путем формирования диаграммы направленности с минимальной чувствительностью в направлении прихода помехи и использования всей энергии сигнала от каждого элемента антенной решетки на всем измерительном интервале за счет формирования единого группового сигнала, обрабатываемого в одном приемном канале, когда количество элементов антенной решетки N.
Поставленная задача решается тем, что в устройство для определения пространственной ориентации объекта, содержащее антенную решетку с N элементами, N малошумящих усилителей, блок равносигнальных угловых измерений, блок определения пространственной ориентации, блок адаптивной компенсации и блок приема и обработки сигналов, включающий опорный генератор, синтезатор частоты, преобразователь частоты, полосовой фильтр, усилитель промежуточной частоты, фильтр низкой частоты, аналого-цифровой преобразователь и систему автоматической регулировки усиления, согласно изобретению введены блок обработки сигналов ГЛОНАСС/GPS, N модуляторов, сумматор, формирователь модуляционных последовательностей и демодулятор группового сигнала, причем каждые соответствующие из N элементов антенной решетки, малошумящих усилителей и модуляторов соединены последовательно, выход каждого из N модуляторов подключен к соответствующему входу сумматора, который последовательно соединен с преобразователем частоты, полосовым фильтром, усилителем промежуточной частоты, фильтром низкой частоты, аналого-цифровым преобразователем и демодулятором группового сигнала, вход формирователя модуляционных последовательностей является выходом блока синтезатора частот блока приема и обработки сигналов, а каждый из N его выходов соединен с управляющим входом соответствующего модулятора и с соответствующим управляющим входом демодулятора группового сигнала, вторые входы преобразователя частоты и аналого-цифрового преобразователя являются соответствующими выходами блока синтезатора частоты, второй выход аналого-цифрового преобразователя является входом системы автоматической регулировки усиления, выходом подключенной к второму входу усилителя промежуточной частоты, каждый из N выходов демодулятора группового сигнала соединен с соответствующими N входами блоков равносигнальных угловых измерений и адаптивной компенсации, выход блока равносигнальных угловых измерений соединен с соответствующим входом блока определения пространственной ориентации, первый выход которого соединен с соответствующим входом блока равносигнальных угловых измерений, а второй выход соединен с соответствующим входом блока адаптивной компенсации, первый выход блока адаптивной компенсации соединен с входом блока равносигнальных угловых измерений, а второй выход соединен с входом блока обработки сигналов ГЛОНАСС/GPS, первый выход которого является выходом устройства с данными о координатах и скорости объекта, второй выход блока обработки сигналов ГЛОНАСС/GPS подключен к соответствующим входам блоков равносигнальных угловых измерений и определения пространственной ориентации, третий выход которого является выходом устройства с данными о пространственной ориентации объекта.
Преимущества предлагаемого технического решения заключаются в использовании канала приема и обработки сигналов с одним трактом обработки сигнала (за счет введения в устройство N модуляторов и сумматора), что приводит к повышению точности измерения информационных параметров за счет исключения погрешности из-за неидентичности нескольких трактов обработки сигнала. Также предлагаемое устройство подавляет любые помехи, отличные по структуре (уровню сигнала, виду модуляции, углу прихода и др.) от сигналов навигационных спутников ГЛОНАСС или GPS, за счет формирования адаптивной диаграммы направленности с минимальной чувствительностью в направлении прихода помехи и с максимальной - в направлении прихода сигналов от навигационных спутников ГЛОНАСС или GPS. При этом за счет обработки сигнала в одном тракте определение параметров сигнала и помехи происходит с большей точностью, что приводит к более точному формированию адаптивных диаграмм направленности и, следовательно, к лучшему подавлению помех, эквивалентному повышению отношения сигнал/шум. Результат действия всех вышеперечисленных факторов приводит к повышению точности главного результата работы предлагаемого устройства - определения пространственной ориентации объекта.
На фиг.1 приведена структурная схема предлагаемого устройства.
Устройство для определения пространственной ориентации объекта содержит антенную решетку 1 с N элементами, каждый из которых последовательно соединен с соответствующим малошумящим усилителем (МШУ) 21…2N и модулятором (Мод.) 31…3N. Управляющим входом каждый из N модуляторов 31…3N соединен с соответствующим из N выходов формирователя модуляционных последовательностей 4, а выходом каждый из N модуляторов 31…3N подключен к соответствующему входу сумматора 5. Выходом сумматор 5 соединен с последовательно соединенными преобразователем частоты (ПЧ) 6, полосовым фильтром (ПФ) 7, усилителем промежуточной частоты (УПЧ) 8, фильтром низких частот (ФНЧ) 9, аналого-цифровым преобразователем (АЦП) 10 и демодулятором группового сигнала 11. Второй вход ПЧ 6 соединен с одним из выходов синтезатора частот (СЧ) 12, другой выход которого соединен с управляющим входом формирователя модуляционных последовательностей 4, а третий выход - с управляющим входом (АЦП) 10. Управляющие входы демодулятора группового сигнала 11 соединены с управляющими входами соответствующих модуляторов 31…2N и также подключены к соответствующим N выходам формирователя модуляционных последовательностей 4. N выходов демодулятора группового сигнала 11 являются соответствующими входами блока адаптивной компенсации 13 и блока равносигнальных угловых измерений 14. Выход блока равносигнальных угловых измерений 14 подключен к входу блока определения пространственной ориентации 16, один выход блока адаптивных измерений 13 подключен к входу блока обработки сигналов ГЛОНАСС/GPS 15, а другой - к входу блока равносигнальных угловых измерений 14. Один выход блока обработки сигналов ГЛОНАСС/GPS является выходом устройства с параметрами местоположения и скорости объекта, а второй выход подключен к входам блоков равносигнальных угловых измерений 14 и определения пространственной ориентации 16. Один выход блока определения пространственной ориентации 16 подключен к входу блока адаптивной компенсации 13, а другой выход - к блоку равносигнальных угловых измерений 14. Третий выход блока определения пространственной ориентации 16 является выходом устройства с параметрами пространственной ориентации объекта. Выход опорного генератора (ОГ) 17 является входом СЧ 12. АЦП 10 своим вторым выходом соединен с системой автоматической регулировки усиления (АРУ) 18, выход которой соединен с управляющим входом УПЧ 8.
Работает устройство следующим образом.
Сигналы, излучаемые радионавигационными спутниками систем ГЛОНАСС или GPS, принимаются элементами антенной решетки 11…1N и через МШУ 21…2N подаются на модуляторы 31…3N. На управляющие входы модуляторов 31…3N с формирователя модуляционных последовательностей 4 подаются кодовые последовательности, в качестве которых должны использоваться взаимно ортогональные импульсные последовательности (например, коды Уолша, меандры кратных частот и т.д.). Модулированные (кодированные) сигналы элементов антенной решетки суммируются в сумматоре 5 в единый (групповой) сигнал и далее обрабатываются в блоке приема и обработки сигнала, где групповой сигнал преобразуется на промежуточную частоту в ПЧ 6, пригодную для перехода на цифровую обработку, фильтруется в ПФ 7 с учетом частот и частотных полос сигналов ГЛОНАСС и GPS, усиливается в УПЧ 8 с системой АРУ 18 для поддержания требуемого динамического диапазона, отфильтровывается от высокочастотных составляющих в ФНЧ 9 и преобразуется в цифровую форму в АЦП 10. Имеющийся в блоке приема и обработки сигналов СЧ 12 формирует сигнал требуемой частоты для преобразования группового сигнала элементов антенной решетки на промежуточную частоту в блоке ПЧ 6, а также тактовую частоту, поступающую на формирователь модуляционных последовательностей 4 и на АЦП 10. Для обеспечения разделения сигналов от элементов антенной решетки 11…1N в демодуляторе группового сигнала 11 производится демодуляция группового сигнала набором последовательностей, идентичных модулирующим кодам, использованным перед суммированием сигналов. Демодулированные сигналы, имеющие цифровую форму, подаются в блок адаптивной компенсации 13, где производится ряд операций (весовая обработка, интегральное накопление сигналов от элементов антенной решетки и учета информации об угле прихода сигнала и помехи от блока равносигнальных угловых измерений 14). Затем происходит суммирование полезного сигнала (сигналов ГЛОНАСС и GPS) от элементов антенной решетки и подавление помех (за счет вычитания сигналов, отличных по структуре от сигналов ГЛОНАСС и GPS) от элементов антенной решетки [2], что эквивалентно формированию диаграммы направленности антенной решетки с минимальной чувствительностью в направлении прихода помехи (и с максимальной чувствительностью в направлении прихода сигнала от спутников ГЛОНАСС или GPS), что позволяет подать очищенный сигнал на блок определения навигационных параметров (координат местоположения и скорости объекта) по системам ГЛОНАСС и GPS в блок обработки сигналов ГЛОНАСС/GPS 15. Также демодулированные сигналы из демодулятора группового сигнала 11 подаются на блок равносигнальных угловых измерений 14, где определяются углы прихода всех сигналов и помех относительно плоскости антенной решетки. Далее, с использованием информации о пространственном положении помех (из блока равносигнальных угловых измерений 14) и о пространственном положении навигационных спутников, от которых получены сигналы (из блока обработки сигналов ГЛОНАСС/GPS 15), в блоке определения пространственной ориентации 16 происходит вычисление углового положения плоскости антенной решетки, а следовательно, и объекта, с которым антенная решетка жестко связана, с повышенной точностью и помехоустойчивостью (в предлагаемом устройстве по сравнению с прототипом).
Таким образом, предлагаемое устройство обеспечивает определение пространственной ориентации объекта с повышенной точностью относительно известного технического решения за счет исключения систематической погрешности при приеме источников навигационного радиосигнала на разные элементы антенной решетки и обработки их в разных приемных трактах, обусловленной неидентичностью приемных трактов обработки сигналов разных элементов антенной решетки, в том числе и неидентичностью аналого-цифровых преобразователей, использующихся при переводе сигналов в цифровую форму. При этом случайная погрешность как минимум не ухудшается по сравнению с известным способом, так как в предлагаемом устройстве не появляются перерывы в наблюдении сигнала от одного источника, т.е. сохраняется максимально возможное отношение сигнал/шум за счет использования всей поступающей энергии сигнала. А за счет дальнейшей адаптивной обработки и формирования диаграммы направленности антенной решетки с минимальной чувствительностью в направлении прихода помех при подавлении этих помех предлагаемое устройство имеет большее отношение сигнал/шум по сравнению с устройствами с отдельными антеннами и без применения адаптивной к помехам обработкой сигналов.
Используемые в устройстве узлы и блоки могут быть реализованы по следующим схемам. Формирователь модуляционных последовательностей может быть выполнен в виде готового цифрового узла, генерирующего сигналы, например, с кодами Уолша с соответствующим числом выходов [3]. Малошумящие усилители, модуляторы, сумматор, преобразователь частоты, полосовой фильтр, усилитель промежуточной частоты с системой АРУ и фильтр низкой частоты могут быть выполнены в соответствии с описанными, например, в [3, 4]. Демодулятор группового сигнала, блоки адаптивной компенсации, равносигнальных угловых измерений, определения пространственной ориентации и обработки сигналов ГЛОНАСС/GPS могут быть реализованы на базе стандартной микро-ЭВМ, например портативного профессионального ноутбука любого известного производителя с аналого-цифровым преобразованием на входе и программно реализованной цифровой обработкой сигнала в соответствии с алгоритмом из [2] и известным алгоритмом обработки сигналов ГЛОНАСС/GPS, где по измеренным псевдодальностям определяются координаты и скорость объекта в данный момент времени, а по измеренным углам прихода сигналов от разных навигационных спутников, координаты которых в данный момент времени известны, вычисляется пространственная ориентация объекта путем решения элементарной тригонометрической задачи [5].
Для определения пространственной ориентации по сигналам навигационных систем ГЛОНАСС и GPS с погрешностью в единицы угловых минут в условиях воздействия помех в известном устройстве должно быть значительное количество элементов в антенной решетке, что приводит к существенному увеличению габаритов и стоимости блоков приема и обработки сигналов, при этом из-за существенной неидентичности отдельных трактов приема значительно снижается точность определения пространственной ориентации (например, фильтры на ПАВ, применяемые в приемном тракте в качестве полосовых фильтров, имеют разброс параметра, характеризующего задержку сигнала, на уровне десятков наносекунд, что приводит к существенным ошибкам привязки временного момента определения угла прихода сигнала спутника и, соответственно, к ошибке определения углового положения объекта). Предлагаемое устройство позволяет с минимальными аппаратными затратами повысить на порядок и более точность измерения углов прихода сигналов от спутников и, соответственно, снизить погрешность определения направления на спутник, а также пространственной ориентации объекта. Причем определение в предлагаемом устройстве производится по сигналам двух систем навигации ГЛОНАСС и GPS. В этом также заключается технико-экономический эффект предлагаемого устройства по сравнению с известными.
Источники информации
1. Патент RU №2425393, опубл. 27.07.2011, бюл. №21.
2. Патент US №6598009, опубл. 22.07.2003.
3. Цифровые радиоприемные системы: Справочник / Под ред. М.И. Жодзишского. М.: Радио и связь, 1990.
4. Амплитудно-фазовая конверсия / Под ред. Г.М. Крылова. М.: Связь, 1979.
5. Сетевые спутниковые радионавигационные системы / B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. / Под ред. B.C. Шебшаевича. - М.: Радио и связь, 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК РАДИОСИГНАЛА | 2009 |
|
RU2425393C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| Система для определения скорости распространения и направления прихода ионосферного возмущения | 2016 |
|
RU2655164C2 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| СИСТЕМА СПУТНИКОВОЙ НАВИГАЦИИ КРЫЛАТОЙ РАКЕТЫ (ВАРИАНТЫ) | 2016 |
|
RU2650582C1 |
Изобретение относится к измерительным системам и может быть использовано для определения пространственной ориентации подвижного объекта. Достигаемый технический результат - повышение точности определения пространственной ориентации объекта путем использования всей энергии сигнала от каждого из N элементов антенной решетки на всем измерительном интервале за счет формирования единого группового сигнала. Указанный результат достигается за счет использования дополнительных модуляторов, сумматора и демодулятора, при этом производится дополнительная модуляция сигнала от каждого элемента антенной решетки своей кодовой модуляционной последовательностью и формирование в сумматоре единого, группового сигнала, обрабатываемого в едином приемном тракте, что исключает погрешности из-за неидентичности при использовании нескольких приемных каналов и нескольких аналого-цифровых преобразователей. Разделение группового сигнала на сигнал от каждого из N элементов антенной решетки происходит на низкой частоте в ходе цифровой обработки в демодуляторе, при этом происходит анализ принятых сигналов на наличие помех и их исключение из группового сигнала путем формирования минимальной чувствительности диаграммы направленности антенной решетки в направлении прихода помех. 1 ил.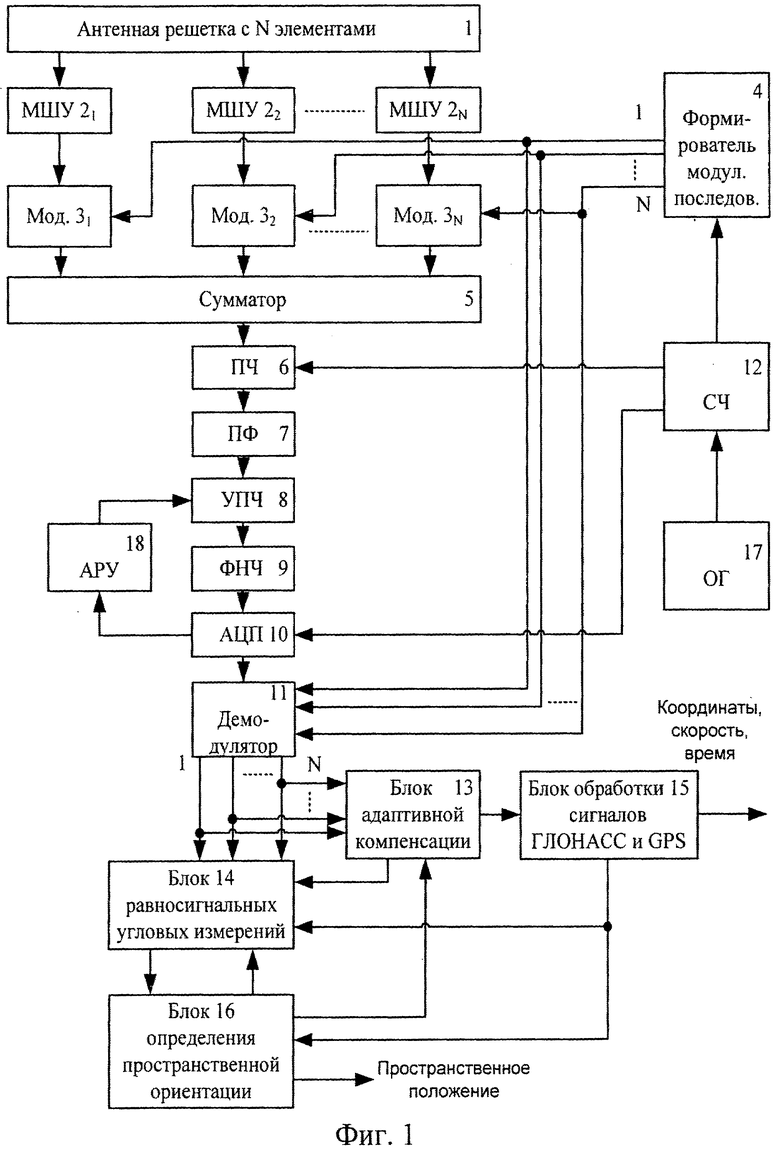
Устройство для определения пространственной ориентации объекта, содержащее антенную решетку с N элементами, N малошумящих усилителей, блок равносигнальных угловых измерений, блок определения пространственной ориентации, блок адаптивной компенсации и блок приема и обработки сигналов, включающий опорный генератор, выходом соединенный с синтезатором частоты, преобразователь частоты, полосовой фильтр, усилитель промежуточной частоты, фильтр низкой частоты, аналого-цифровой преобразователь и систему автоматической регулировки усиления, отличающееся тем, что в него введен блок обработки сигналов ГЛОНАСС/GPS, N модуляторов, сумматор, формирователь модуляционных последовательностей и демодулятор группового сигнала, причем каждые соответствующие из N элементов антенной решетки, малошумящих усилителей и модуляторов соединены последовательно, выход каждого из N модуляторов подключен к соответствующему входу сумматора, который последовательно соединен с преобразователем частоты, полосовым фильтром, усилителем промежуточной частоты, фильтром низкой частоты, аналого-цифровым преобразователем и демодулятором группового сигнала, вход формирователя модуляционных последовательностей является выходом блока синтезатора частот блока приема и обработки сигналов, а каждый из N его выходов соединен с управляющим входом соответствующего модулятора и с соответствующим управляющим входом демодулятора группового сигнала, вторые входы преобразователя частоты и аналого-цифрового преобразователя являются соответствующими выходами блока синтезатора частоты, второй выход аналого-цифрового преобразователя является входом системы автоматической регулировки усиления, выходом подключенной к второму входу усилителя промежуточной частоты, каждый из N выходов демодулятора группового сигнала соединен с соответствующими N входами блоков равносигнальных угловых измерений и адаптивной компенсации, выход блока равносигнальных угловых измерений соединен с соответствующим входом блока определения пространственной ориентации, первый выход которого соединен с соответствующим входом блока равносигнальных угловых измерений, а второй выход соединен с соответствующим входом блока адаптивной компенсации, первый выход блока адаптивной компенсации соединен с входом блока равносигнальных угловых измерений, а второй выход соединен с входом блока обработки сигналов ГЛОНАСС/GPS, первый выход которого является выходом устройства с данными о координатах и скорости объекта, второй выход блока обработки сигналов ГЛОНАСС/GPS подключен к соответствующим входам блоков равносигнальных угловых измерений и определения пространственной ориентации, третий выход которого является выходом устройства с данными о пространственной ориентации объекта.
| US 6598009 B2, 22.07.2003 | |||
| ПОЛЯРИЗАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОЙ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2310162C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ ОБЪЕКТА | 2003 |
|
RU2315357C2 |
| US 20030050755 A1, 13.03.2003 | |||
| JP 2001216377 A, 10.08.2001 | |||
| JP 0007244146 A, 19.09.1995 | |||

