Текст описания приведен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2514197C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2553270C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2327186C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2371733C1 |

Изобретения относятся к радиотехнике и могут быть использованы для определения угловой ориентации летальных аппаратов в пространстве и на плоскости. Достигаемым техническим результатом является сокращение временных затрат на измерение углов крена и азимута с учетом угла сноса и дополнительное измерение угла тангажа. Технический результат достигается тем, что наиболее трудоемкие операции по формированию эталонных разностей фаз выполняют на подготовительном этапе, а определение ориентации объекта сводится к простым физическим операциям формирования матрицы измерений и поиску в ней элемента с минимальным значением. Элементы матрицы измерений находят путем вычисления разности между соответствующими эталонными и измеренными разностями фаз сигналов космических аппаратов (КА) с априорно известным местоположением, возведения их в квадрат и суммирования по всем возможным парам антенных элементов и всем КА. Устройство определения угловой ориентации летательных аппаратов, реализующее способ, содержит М идентичных приемных каналов, М>4, блок формирования опорных сигналов, тактовый генератор, S корреляторов, S блоков анализа, S+1 коммутаторов, блок начальной установки корреляторов, S блоков вычитания, блок памяти, вычислитель-формирователь, блок принятия решения, блок управления, блок индикации, три входных установочных шины, радионавигатор и антенный элемент, определенным образом соединенные между собой. 2 н.п. ф-лы, 25 ил.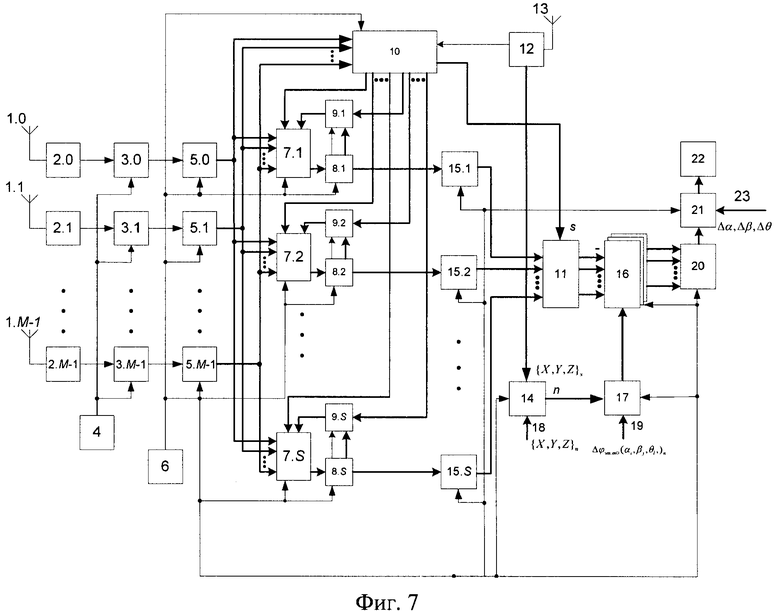
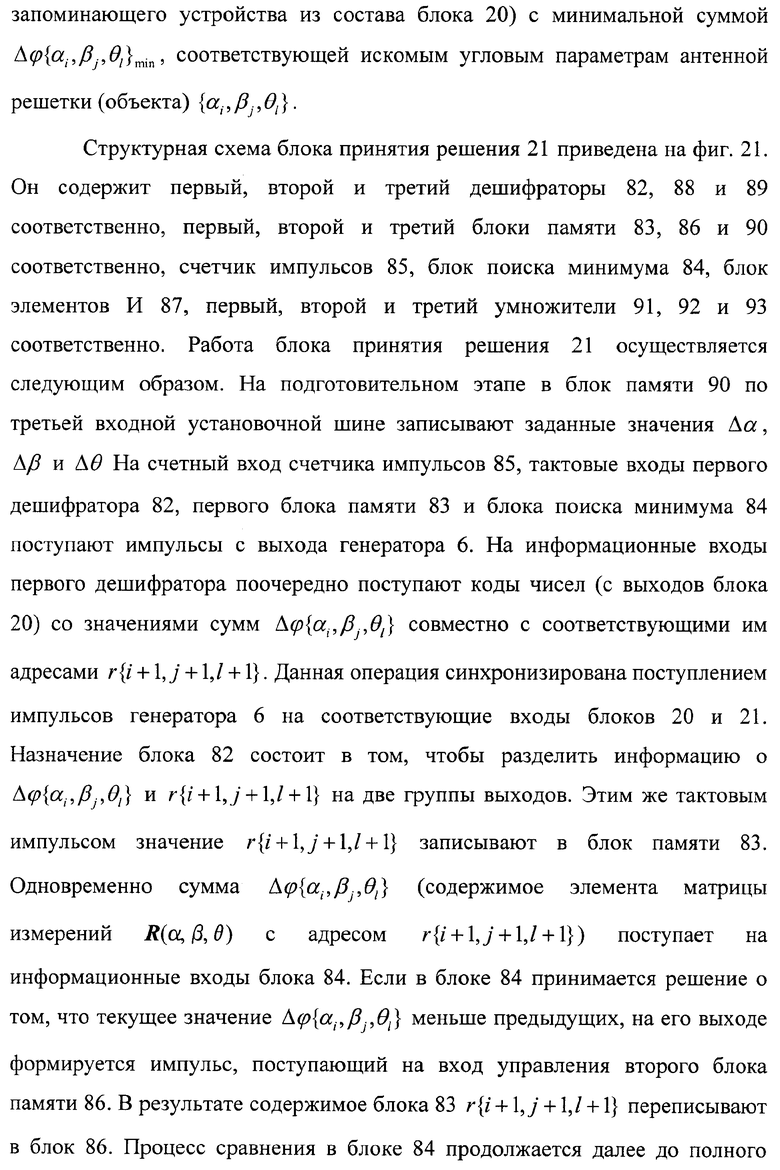
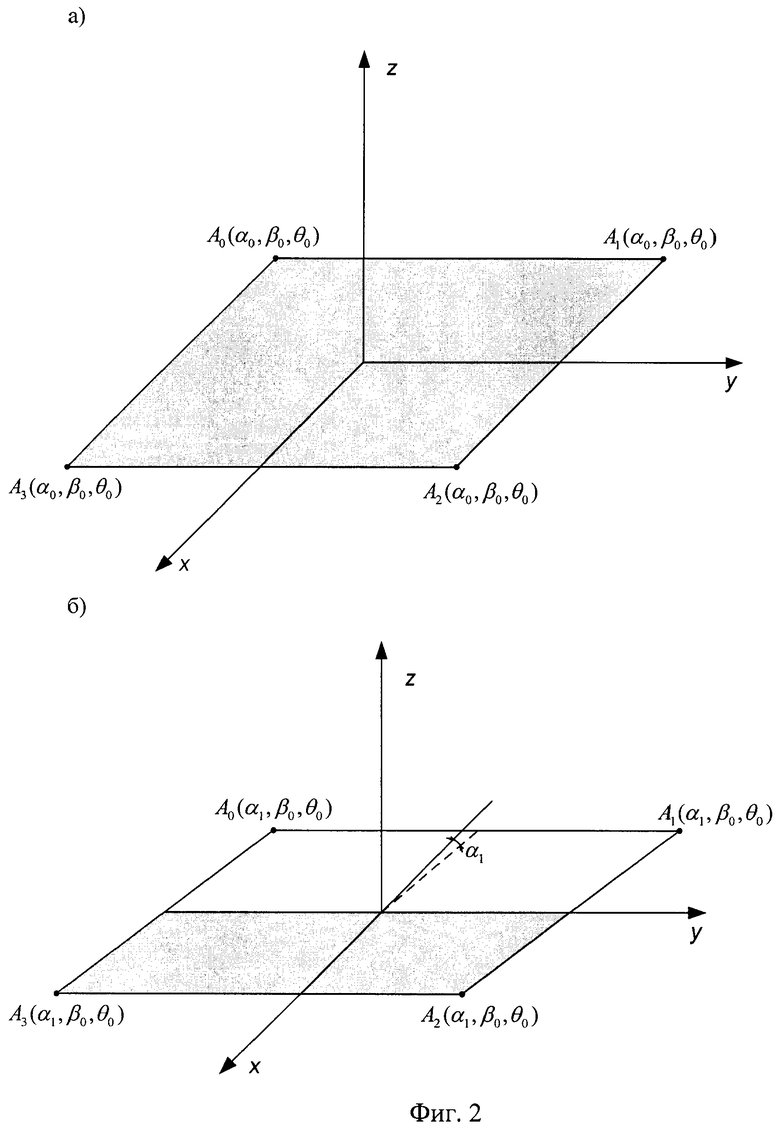
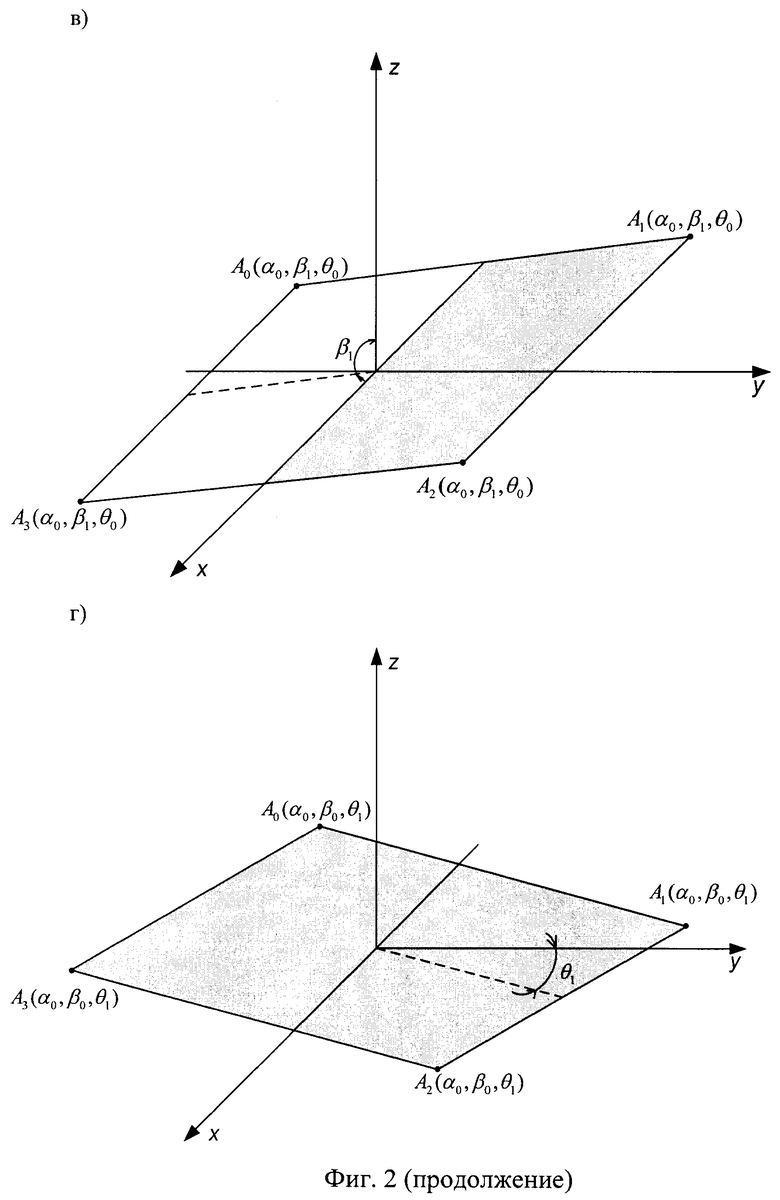
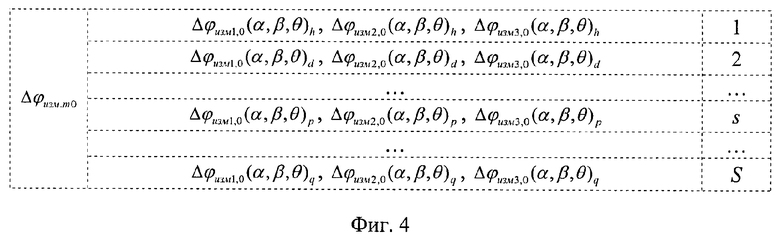
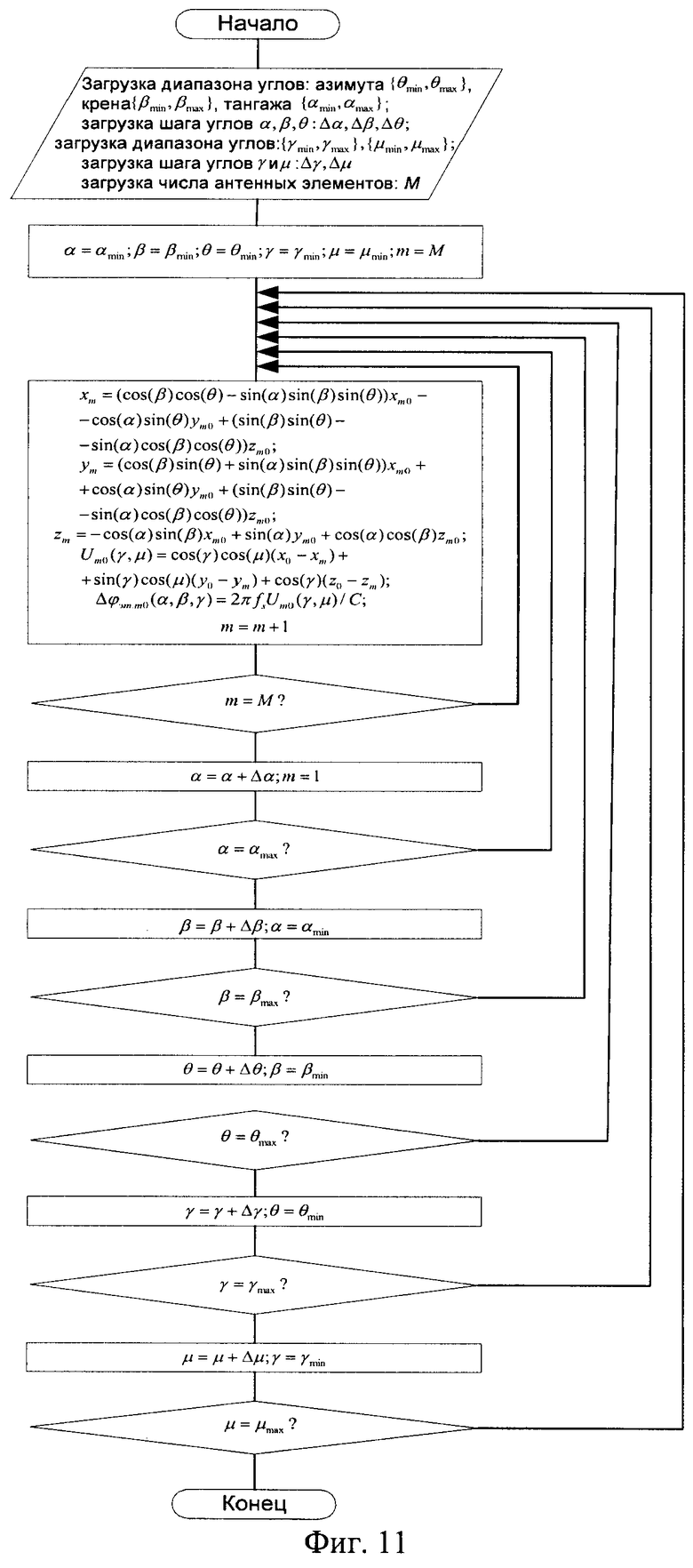
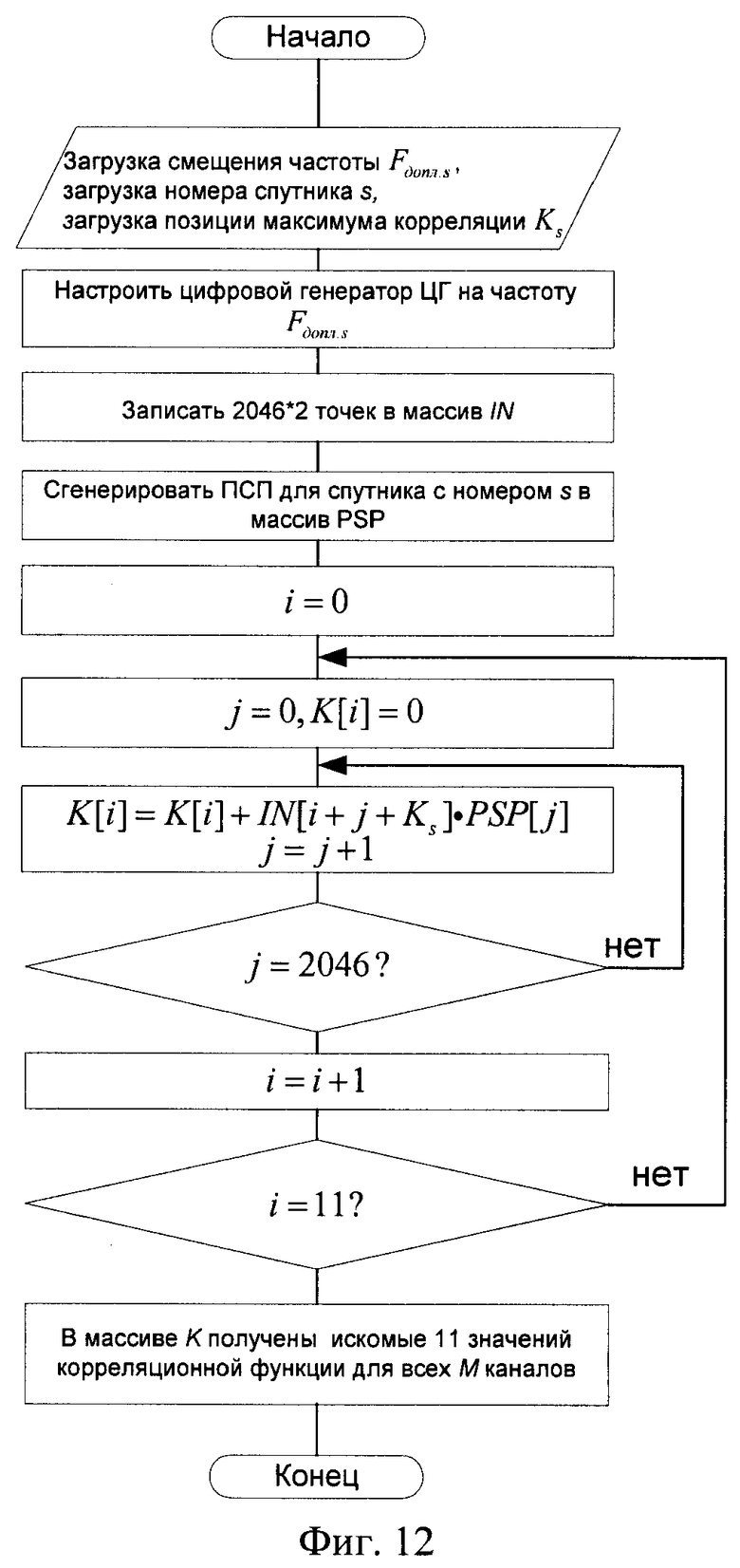
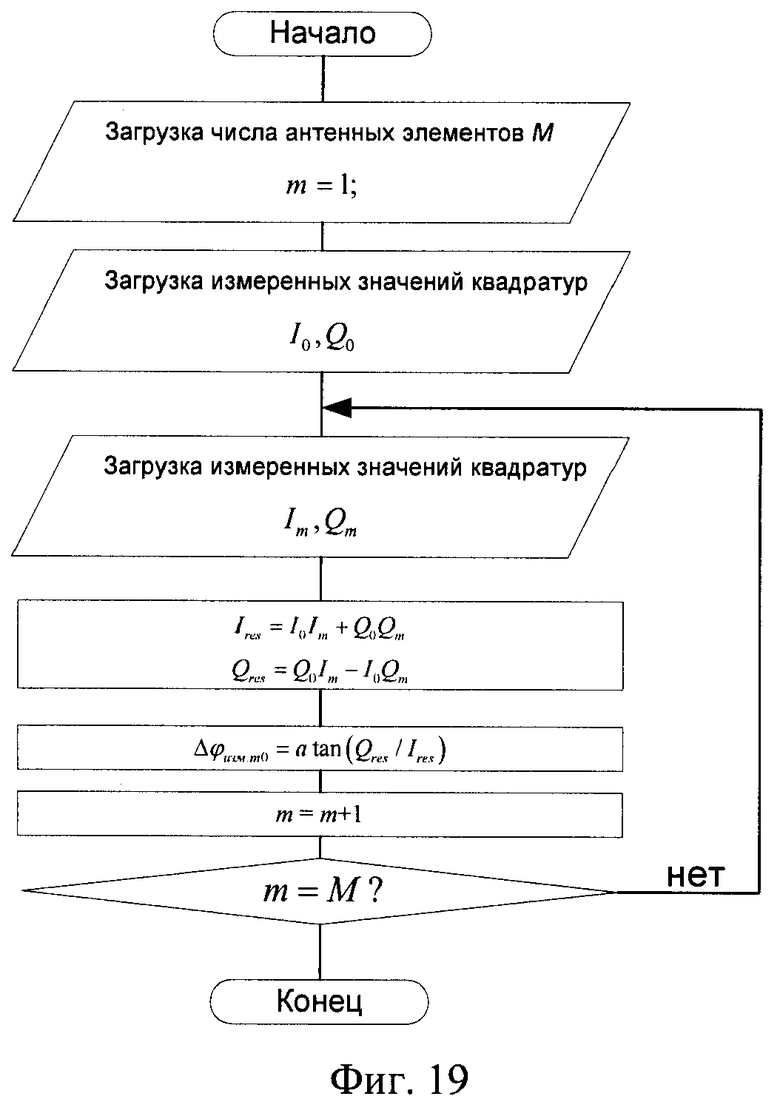
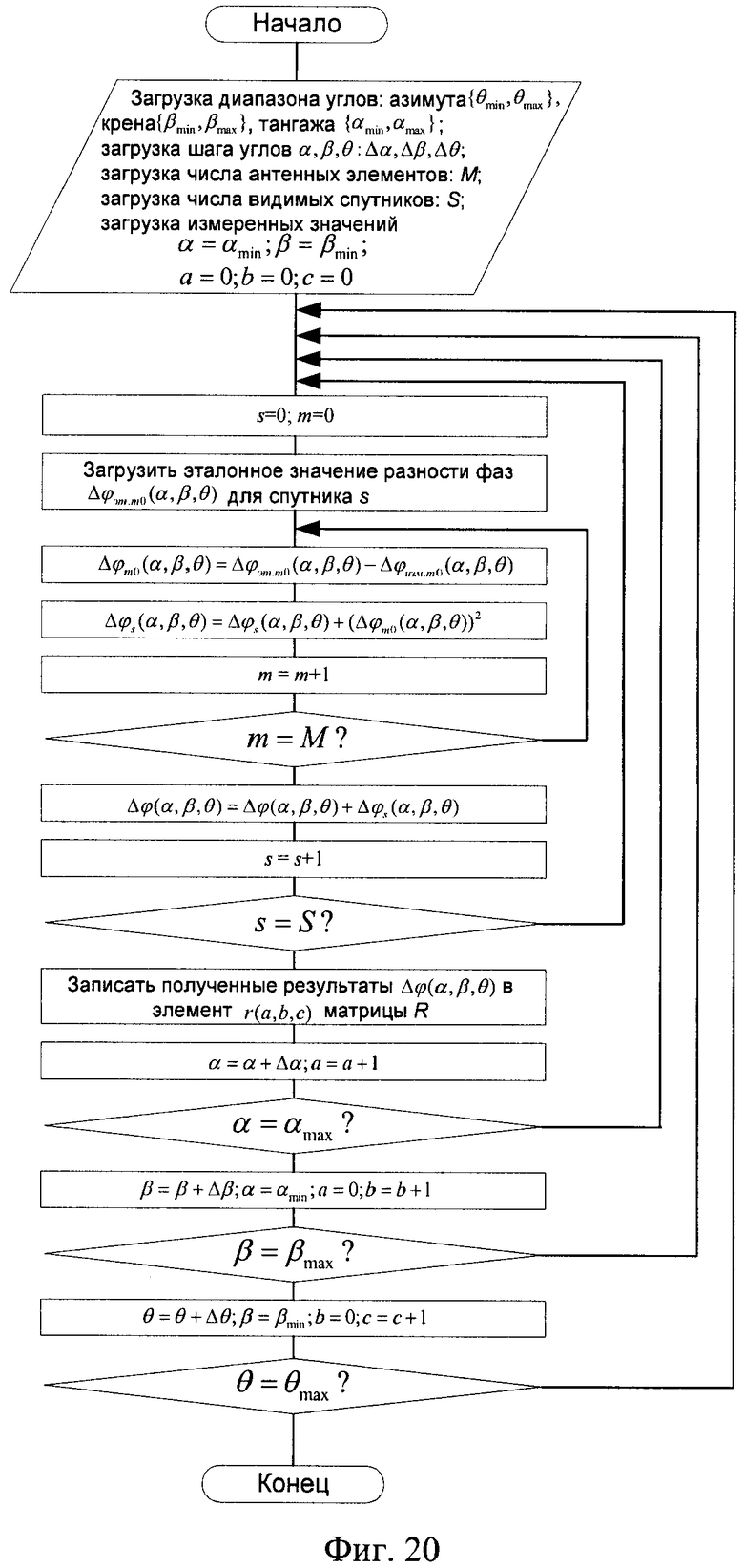
1. Способ определения угловой ориентации летательных аппаратов, основанный на приеме сигналов от космических аппаратов (КА) глобальных навигационных спутниковых систем на антенную решетку (АР) из М, М≥4 пространственно разнесенных антенных элементов (АЭ), расположенных в одной плоскости параллельно двум осям симметрии объекта, измерении фазового сдвига между принятыми в АЭ сигналами от каждого КА, отличающийся тем, что на подготовительном этапе или в процессе полета летательного аппарата сферу над антенной решеткой равномерно разбивают на N=D/D0 элементарных зон привязки, где D и D0 - соответственно площади сферы на удалении нескольких тысяч километров от центра АР и элементарной зоны привязки, присваивают каждой элементарной зоне привязки порядковый номер bn(x,y,z), n=1, 2, …, N, αi, βj, θl - соответственно значения углов тангажа, крена и азимута объекта и АР, определяют координаты местоположения центров элементарных зон привязки {x,y,z}n, рассчитывают для каждой пары антенных элементов Am0, m=1, 2, …, М-1 эталонные значения разностей фаз прихода сигналов относительно координат местоположения центров каждой элементарной зоны привязки Δφэm.mo(α0, β0, θ0)n, последовательно дискретно изменяют ориентацию АР на заданные значения углов Δα, Δβ, Δθ в предварительно определенных пределах {αmin, αmax}, {βmin, βmax} и {θmin, θmax}, (αmax-αmin)/Δα=I, (βmax-βmin)/Δβ=J, (θmax-θmin)/Δθ=L без изменения координат центра АР относительно центров элементарных зон привязки, для каждого положения АР (αi, βj, θ1) и для каждого центра элементарных зон привязки рассчитывают эталонные значения разностей фаз Δφэm.mo(αi, βj, θl)n и запоминают их, в процессе работы принимают сигналы от первого обнаруженного КА глобальной навигационной спутниковой системы, измеряют разности фаз принимаемых сигналов в антенных элементах АР Δφизм.mo(α, β, θ)n, вычисляют разность между эталонными разностями фаз, соответствующими углам АР α0, β0, θ0 для bn-й элементарной зоны привязки и измеренными разностями фаз сигналов КА с априорно известным местоположением bn {x,y,z}: Δφmo (α0, β0, θ0)=Δφэm.mo(α0, β0, θ0)n-Δφизм.mo(α, β, θ)n, возводят ее в квадрат и суммируют:  ,
,
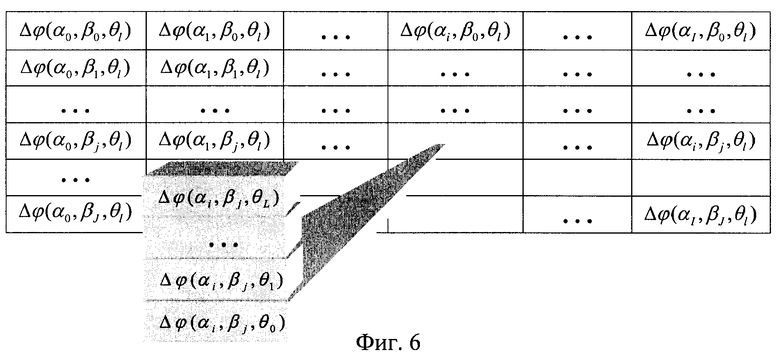
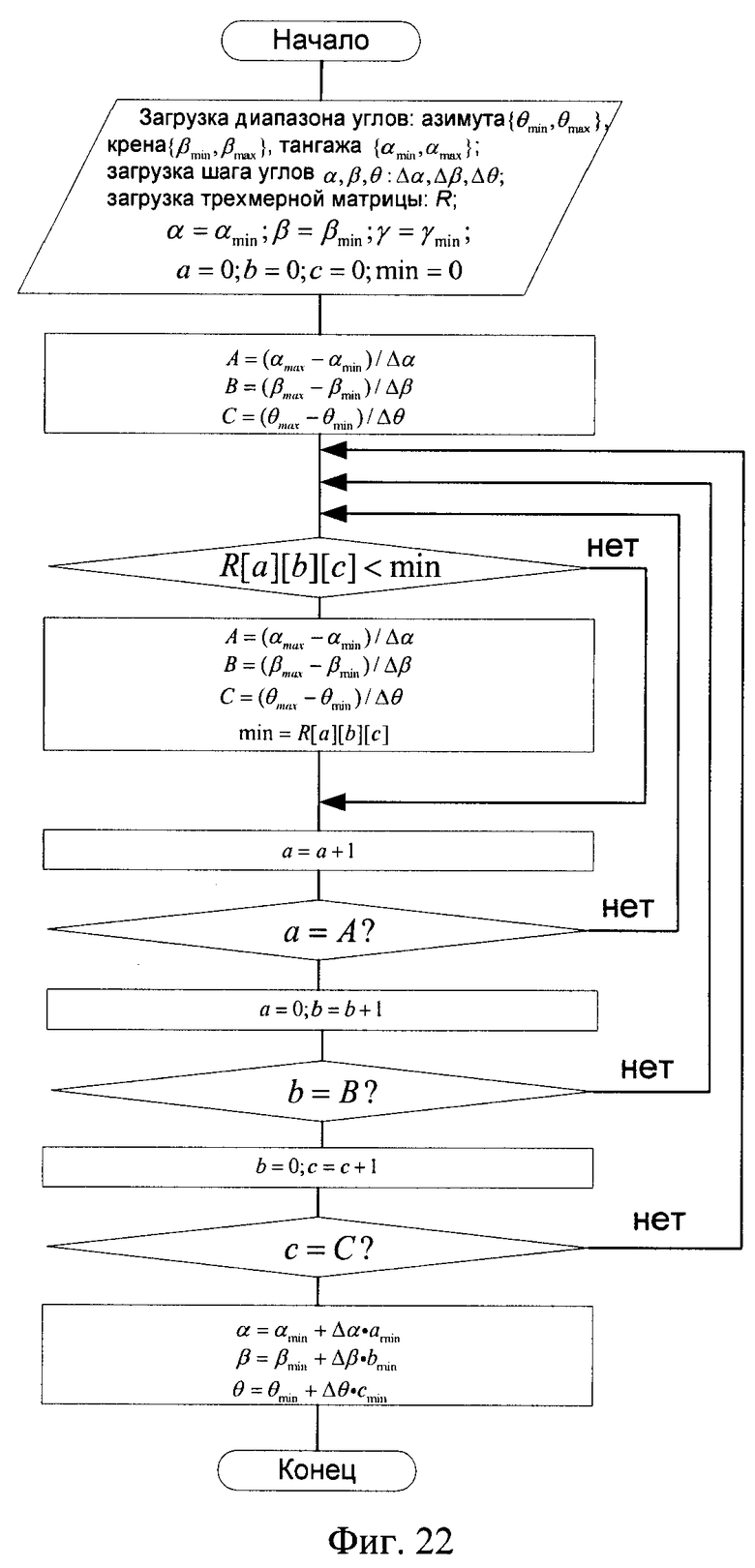
результаты вычислений Δφ1(α0,β0,θ0) запоминают, принимают сигналы от других КА и определяют значения Δφs(α0,β0,θ0) для всех S наблюдаемых КА, s=1, 2, …, S, результаты вычислений суммируют:  и запоминают в элементе r{1,1,1} трехмерной матрицы измерений R(α, β, θ), вычисляют значения Δφ(αi, βj, θl) для всех возможных углов (αi, βj, θl) ориентации АР, i=0, 1, 2, …, I, j=0, 1, 2, …, J, l=0, 1, 2, …, L, а полученные результаты записывают в соответствующие элементы r{i+1, j+1, l+1} трехмерной матрицы измерений R(α, β, θ), за измеренную ориентацию АР и летательного аппарата принимают значения углов {αi, βj, θl}, соответствующие элементу r{i+1, j+1, l+1} матрицы измерений R(α,β,θ), имеющему минимальное значение.
и запоминают в элементе r{1,1,1} трехмерной матрицы измерений R(α, β, θ), вычисляют значения Δφ(αi, βj, θl) для всех возможных углов (αi, βj, θl) ориентации АР, i=0, 1, 2, …, I, j=0, 1, 2, …, J, l=0, 1, 2, …, L, а полученные результаты записывают в соответствующие элементы r{i+1, j+1, l+1} трехмерной матрицы измерений R(α, β, θ), за измеренную ориентацию АР и летательного аппарата принимают значения углов {αi, βj, θl}, соответствующие элементу r{i+1, j+1, l+1} матрицы измерений R(α,β,θ), имеющему минимальное значение.
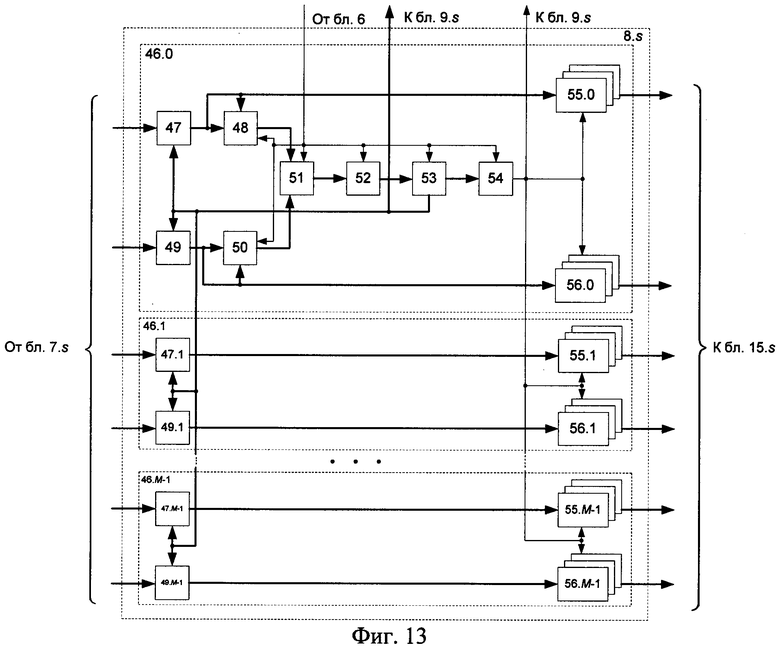
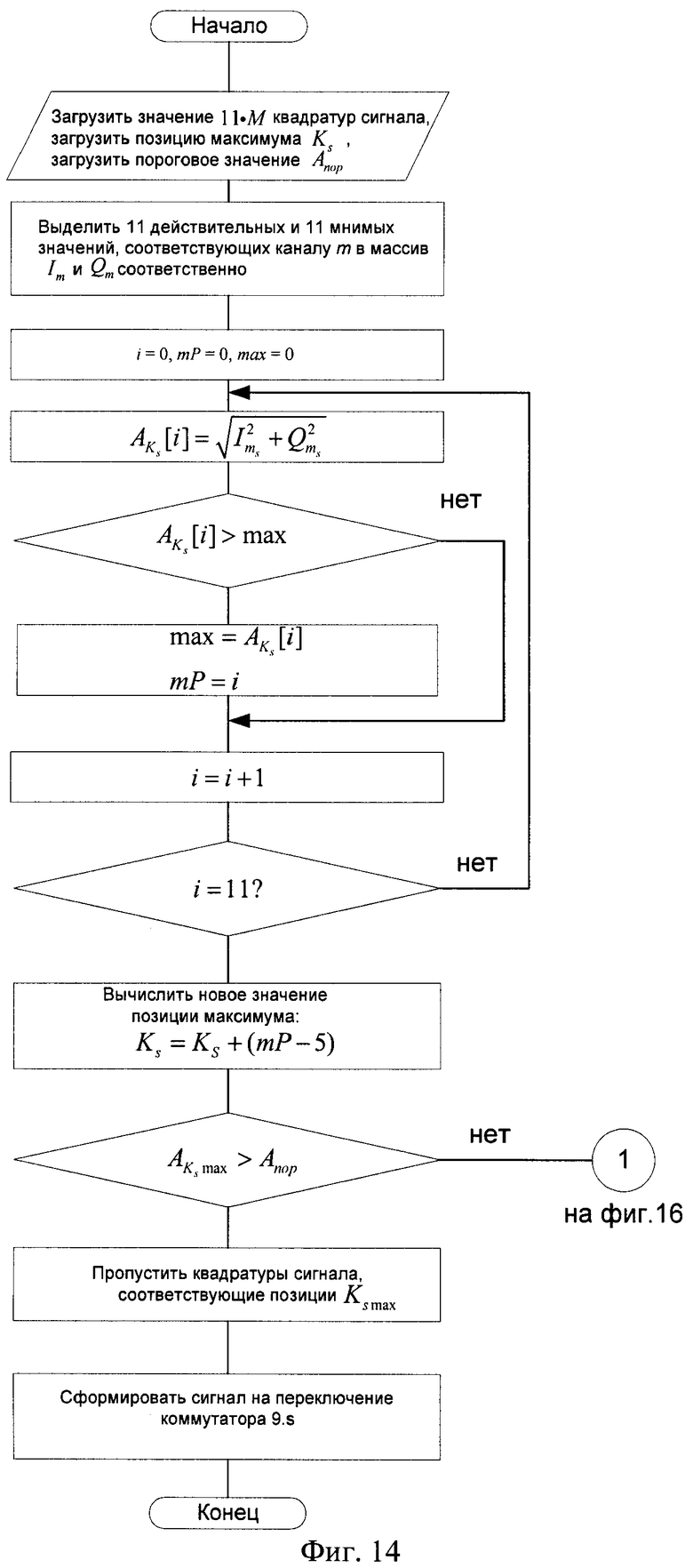
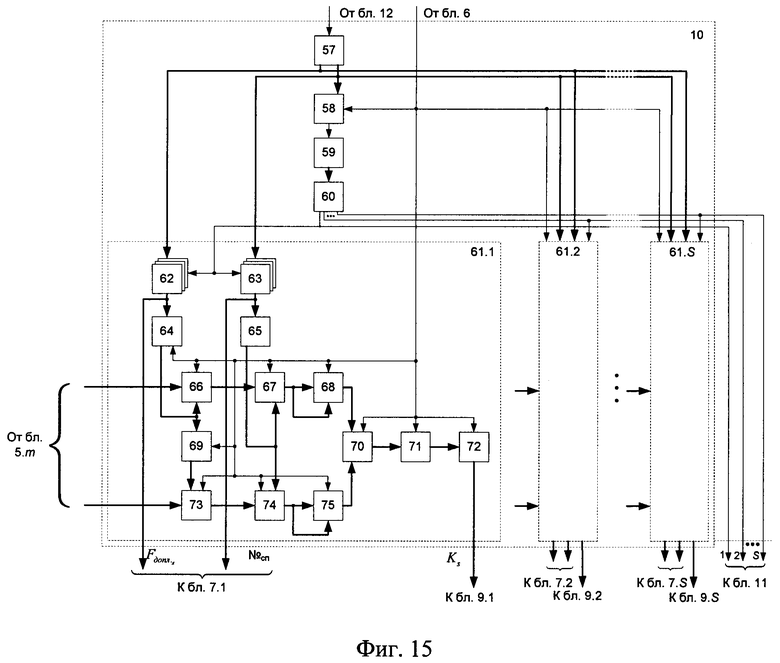
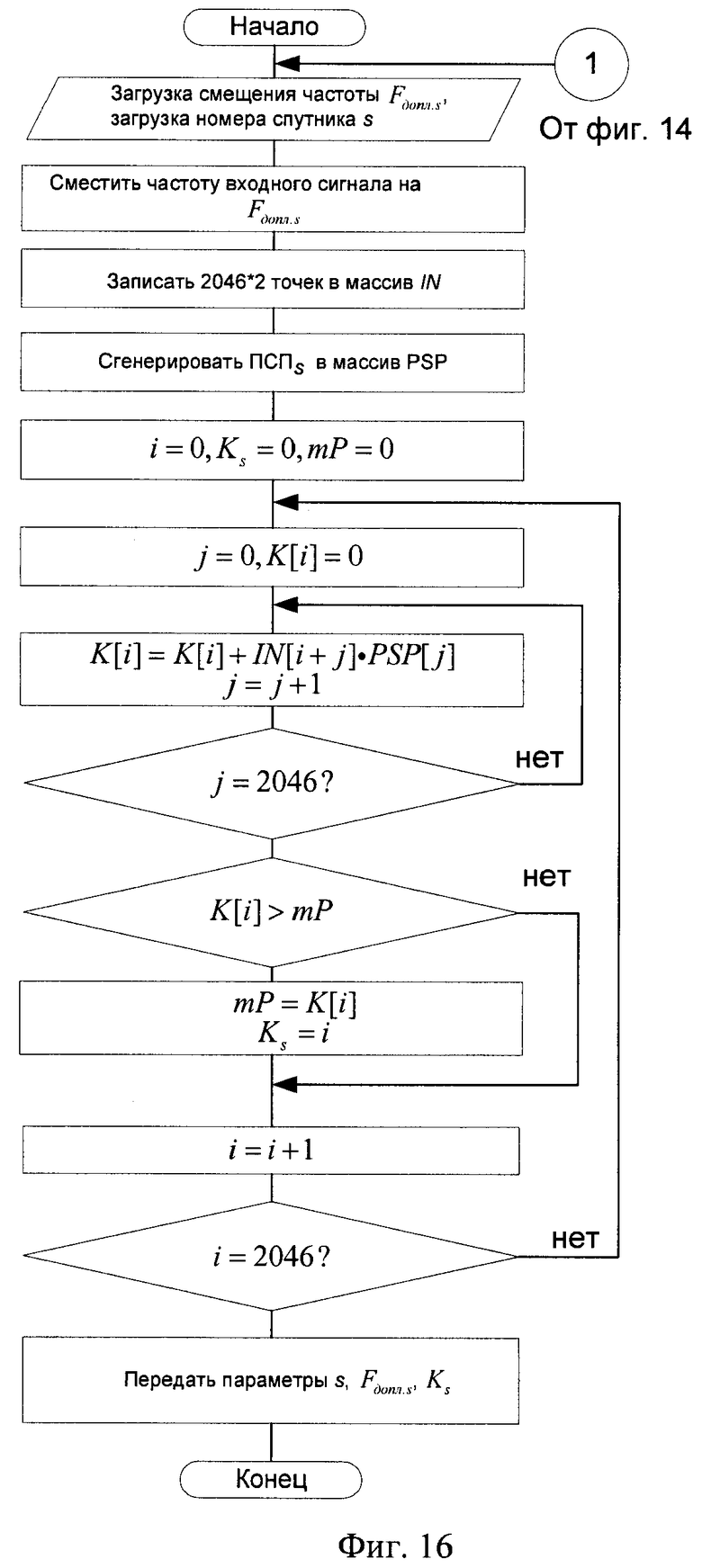
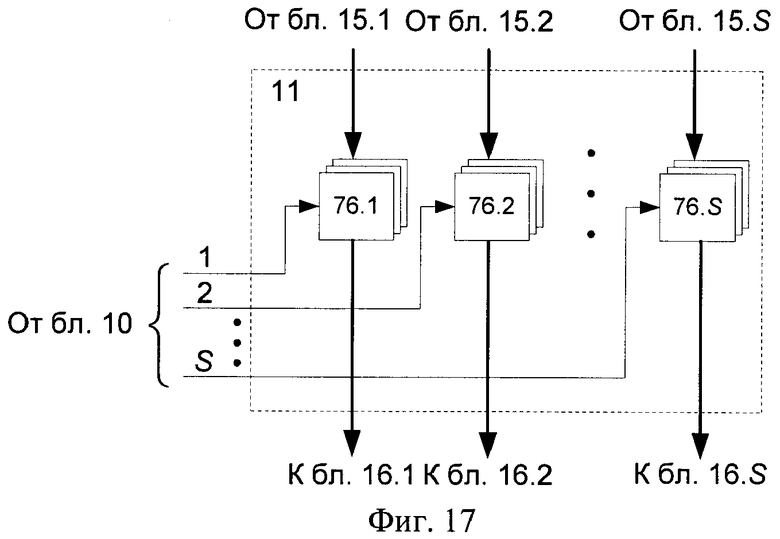
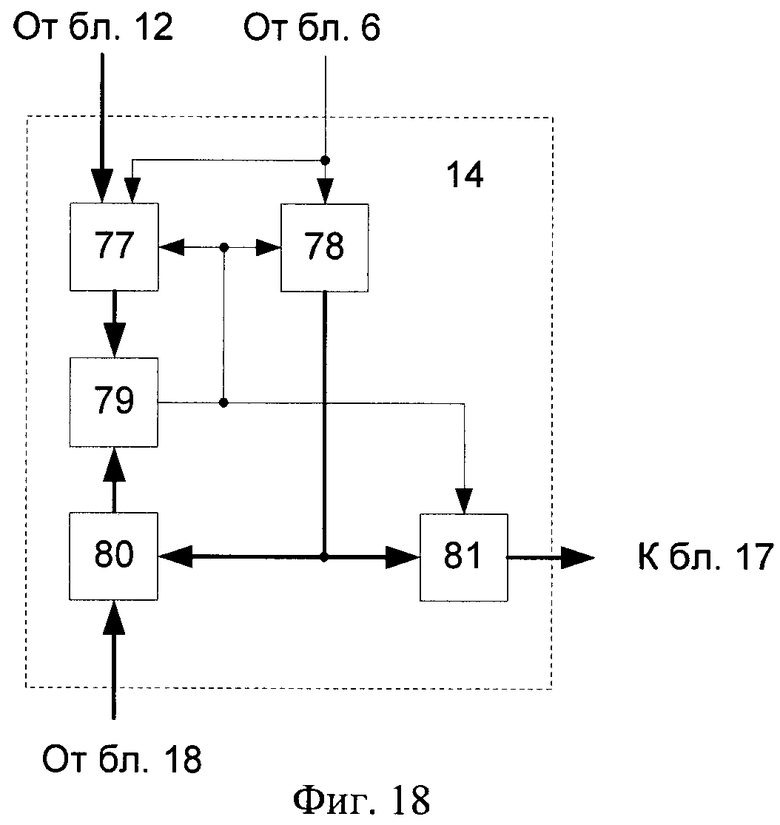
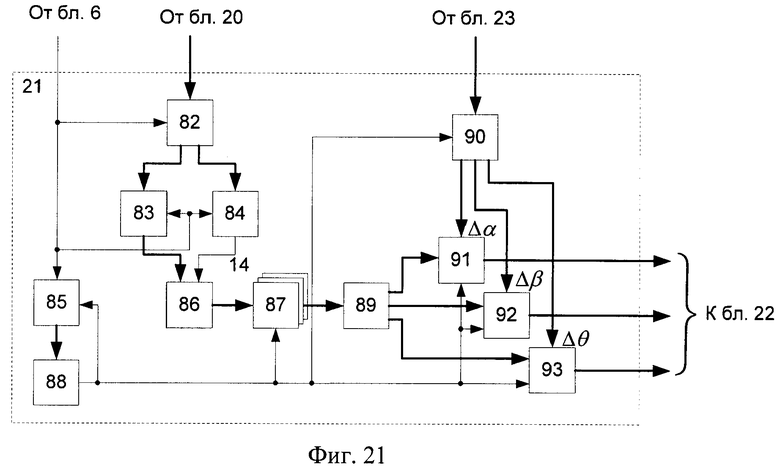
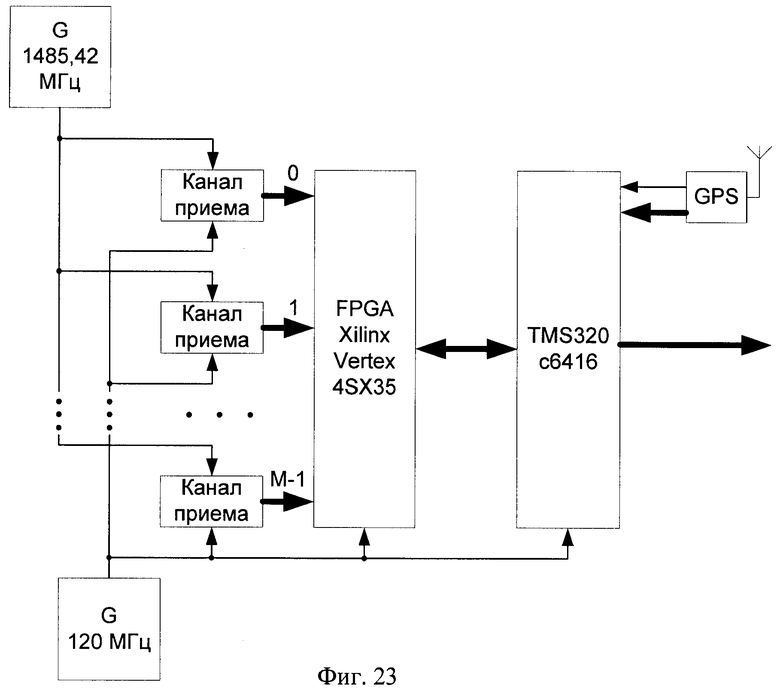
2. Устройство определения угловой ориентации летательных аппаратов, включающее М, М>4 идентичных приемных каналов из последовательно соединенных антенного элемента, малошумящего усилителя, радиотракта и блока цифровой обработки, предназначенного для преобразования аналогового сигнала в цифровую форму и разложения его на квадратуры, две группы выходов которого являются первой и второй группами информационных выходов соответствующего канала приема, блок формирования опорных сигналов, выход которого соединен со вторыми входами радиотрактов приемных каналов, тактовый генератор, отличающееся тем, что дополнительно введены S корреляторов, S блоков анализа, предназначенных для оценки качества принимаемых от космических аппаратов (КА) сигналов, S+1 коммутатор, блок начальной установки корреляторов, S блоков вычисления разности фаз, S блоков вычитания, блок памяти, вычислитель-формирователь, предназначенный для формирования трехмерной матрицы измерений R(α, β, θ), блок принятия решения, предназначенный для нахождения элемента трехмерной матрицы измерений с минимальным значением, блок управления, предназначенный для хранения координат центров элементарных зон привязки и сравнения этих координат с координатами обнаруженного космического аппарата, блок индикации, первая, вторая и третья входные установочные шины, радионавигатор и М+1-й антенный элемент, выход которого подключен ко входу радионавигатора, первый информационный выход которого соединен со входом управления блока начальной установки корреляторов, группы информационных входов которого объединены с соответствующими группами информационных входов корреляторов и соответствующими группами информационных выходов приемных каналов, тактовые входы которых объединены и соединены с тактовыми входами блоков цифровой обработки приемных каналов, выходом тактового генератора, входами синхронизации корреляторов, тактовыми входами блока управления, блоков вычисления разности фаз, блока памяти, блоков вычитания, вычислителя-формирователя, блока принятия решения, блока начальной установки корреляторов, S+1-го коммутатора, блоков анализа, вторые группы информационных выходов которых соединены с группами информационных входов соответствующих блоков вычисления разности фаз, первые выходы блоков анализа соединены со входами управления соответствующих коммутаторов, третьи группы выходов блоков анализа соединены с первыми группами информационных входов соответствующих коммутаторов, группы информационных входов блоков анализа соединены с группами информационных выходов соответствующих корреляторов, первые группы входов управления которых соединены с соответствующими первыми группами информационных выходов блока начальной установки корреляторов, вторые группы входов управления корреляторов соединены с группами выходов соответствующих коммутаторов, вторые группы информационных входов которых соединены с соответствующими вторыми группами информационных выходов блока начальной установки корреляторов, группы информационных выходов блоков вычисления разности фаз соединены с соответствующими группами входов S+1-го коммутатора, группа адресных входов которого соединена с группой адресных выходов блока начальной установки корреляторов, a S групп информационных выходов соединены с группами входов вычитаемого соответствующих блоков вычитания, группы входов уменьшаемого которых объединены и соединены с группой информационных выходов блока памяти, группа информационных входов которого является второй входной установочной шиной устройства определения угловой ориентации летательных аппаратов, а группа адресных входов соединена с группой информационных выходов блока управления, вторая группа информационных входов которого является первой входной установочной шиной устройства определения угловой ориентации летательных аппаратов, первая группа информационных входов блока управления соединена со второй группой информационных выходов радионавигатора, S групп информационных входов вычислителя-формирователя соединены с группами информационных выходов соответствующих блоков вычитания, а группа информационных выходов соединена с первой группой информационных входов блока принятия решения, вторая группа информационных входов которого соединена с третьей входной установочной шиной устройства определения угловой ориентации летательных аппаратов, а группа информационных выходов соединена с группой информационных входов блока индикации.
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (ВАРИАНТЫ) | 2000 |
|
RU2185637C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2310582C2 |
| СПОСОБ МНОГОМЕРНОГО ТРАЕКТОРНОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306581C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| US 5995043 А, 30.11.1999 | |||
| СПОСОБ СТАБИЛИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 0 |
|
SU283353A1 |
| US 5549477 А, 27.08.1996. | |||

