Изобретение относится к машиностроению и может быть использовано в качестве устройства для стопорения подвижных элементов различных машин в произвольном положении.
Известны устройства для стонорения подвижного элемента в произвольном положении, включающие зубчатую рейку с клиновыми зубьями, предназначенную для крепления на подвижном элементе и установленную с возможностью взаимодействия с клиновым концом подпружиненного фиксатора,установленного в корпусе с возможностью осевого перемещения, и привод перемещения фиксаторов t|.
Известные устройства обладают недостаточной надежностью фиксации.
Цель изобретения - попьпнение, 1 адежHocTif фиксации.
Указанная цель достигается тем, что устройство для стопо11ения подвижного элемента в про.извольном положении, включаюHJ.ee зубчатую рейку с клпновы.ми зубьями, предназначенную для )епления на подвижном элементе и устгиювлепную с возможностью взаимодействия с клиновым концом нодпрул инешюго (|)иксатора, установленноio в корпусе с воз.можпостыо осевого перемеидепия, и привод перемещения фиксаторов, снабжено по крайней мере тремя допол нительньвп- фиксятора.ми, идептич11.11ми ос1 овному, установ.кмшыми с возможностью контактирования с иак.понпими повер.чпостями введепны.х в устройство четырех подиружиненных клши.ев, 1а;}мещепных в корпусе с возмо)кност1 к) .ме1иения пегчкМ)дикулярно фиксаторал, траверсой, жестко связанной с ,1 переме цения с пксаторов и Ciia6 Keiiiioi стержнями для отгзода клиньев от фиксаторов, и)ичем niar р.иксаторов определяется из соотиошения
1ф - tp(n - 0,75), гдеt ф - таг (|)иксаторов;
iр-- таг зубчатсл
п --Г целое чис.;1о (и - 1, 2, 3...). а клинья и (|iiiKcaT()|ii)i поднружинс1ы навстречу один другому.
Такое вьиюлмение yc-i-ройства обсспсч вает значитг.:п.ч1ое пов1;1И1ение его падс/кности при стопорепии подвижного э;1ем(;||та в произвольном .чолг)же11ии.
На фи1 1 1 3ображено устройство в момент расфиксации, разрез; на фиг. 2
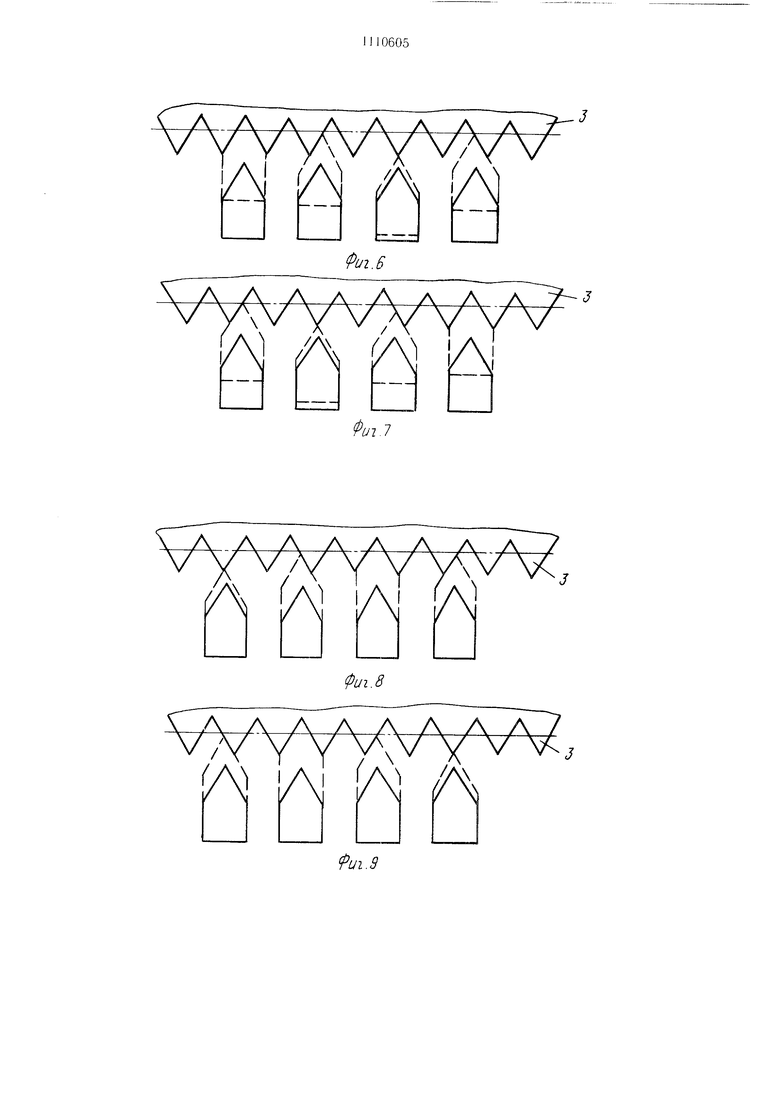
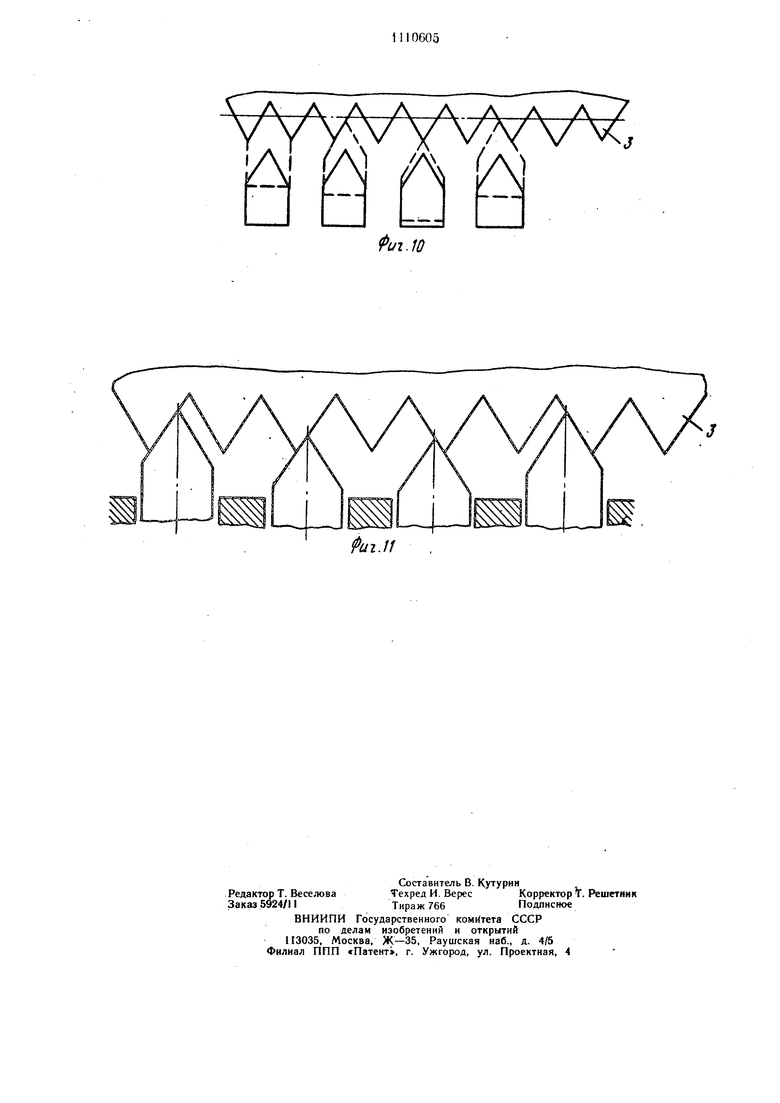
то же, в момент стопорения, разрез; па фиг. 3 - разрез la фиг. 1; на фиг. 4 - разрез Б-ГЗ на (|)иг. 2; lia (|)иг. 5 - вид В на (зиг. I; н,а - схема работы фиксаторов при расположении впадины рейк1 против первого фиксатора; на фиг. 7 - то же, при сдвиге вправо па 0,25 :иага рейки; на фиг. 8 -- то же, при сдсяге рейки вправо на 0,5 тага :1ейки; иа ериi-. 9-г то же, при сдвиге рейки вправо на 0,75 шага рейки; па (Ьиг. 10 - то же, при СДЕ.Ш-С
рейки вправо на 1,0 H.iara рейк-i; на фиг. Ц то же, при сдвиге рейки впраЕЮ на 0,125 шага рейки.
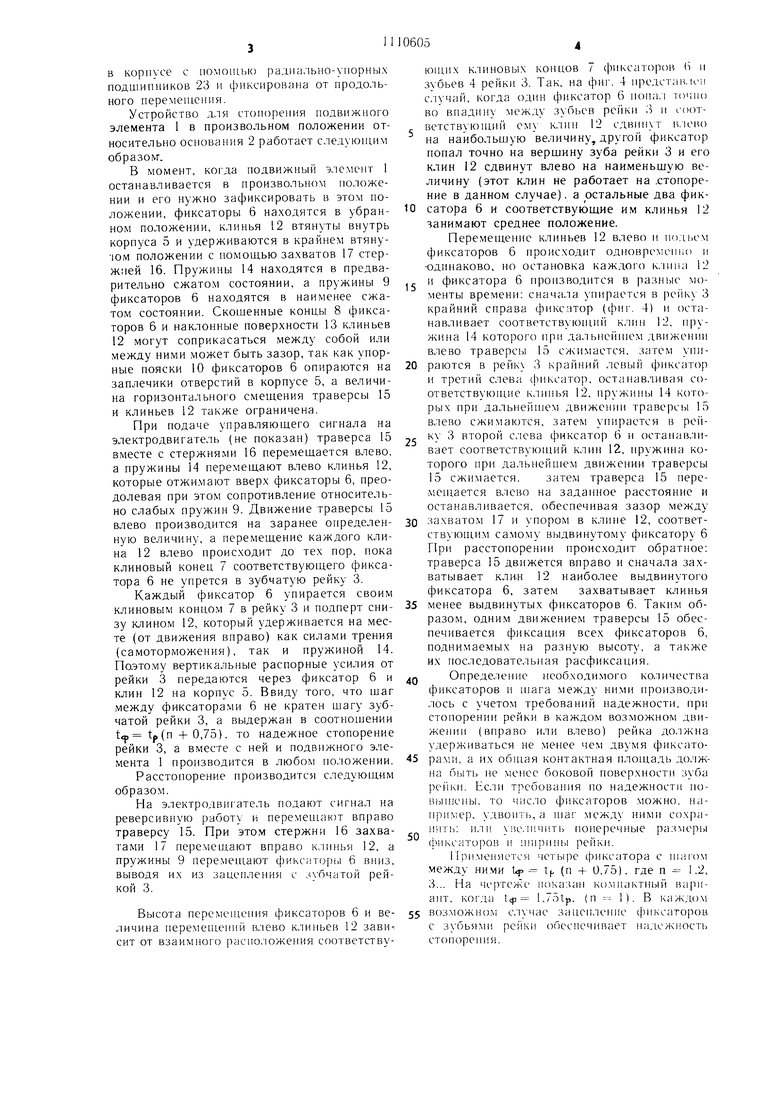
Устройство для стопорения подвижного элемента I в произвольном положении относительно основания 2 содержит зубчатую рейку 3 с клиновыми зубьями 4. Рейка 3 установлена на подвижном элементе I. На основании 2 жестко аакреплйн корпус 5, в котором размещены четыре выдвижных фиксатора 6, передние концы 7 которых выполнены клиновыми, соответствующими по профилю зубьям-рейки 3. Задние концы 8 этих фикеаторов 6 выполнены скоHjeHHbiMH. Каждый фиксатор 6 подпружинен на утапливание в корпус 5 с помощью предварительно напряженной пружины сжатия 9. Каждый фиксатор 6 снабжен упорным поясом 10, а после установки фиксаторов 6 в корпус 5 установлена плита 1 с отверстиями для фиксаторов 6. Плита П жестко соединена с корпусом 5. Таким образом, каждый фиксатор 6 установлен в отверсии корпуса 5 с возмол ностью продольного пе)эемещения и передает поперечные нагрузки от рейки 3 на корпус 5 с помощью пояска 10 и плиты II. Фиксаторы б расположены в плоскости рейки 3 с шагом tcp который отличается от тага tp зубьев 4 рейки 3 и равен t(p tp (п + 0,75), где п - целое (п 1,2, 3...).
Выдвижение фиксаторов б осуществляется за счет взаи.моДействия их с четырьмя клиньп. 12, оси которых перпендикулярны (|)иксаторам б. Каждый клин 12 расположен в отверстии корпуса 5 с возмож1юстью продольного перемещения, снабжен накло И1ой поверхностью 13, угол которой равен углу самоторможения пары материалов ф)п сатора 6 и KJiHiia 12. например стал -сталь (12-15°).
K.iiiH 12 поллружинен на выдвижение из 5 с помонаыо предва:)итель,но сжатой пружин, 14 и связан с -.-раверсой 15 f гюмо.цыо стержня 16. который концом жестко закреплен .на траверсе 15, а иа другом конце снабжен захватом 17, например, в виде ншрокой 1оловки-. Пружина 14 опирается концами в клин 12 и т)аверсу 15. Па траверсе 15 жестко закреплены концы четырех возвратньгх стер 1и1ей 16, а травс{ са 15 жестко установлена на конце хоДОВО1Ч) винта 18 приво/;Н перемещения фийсаторов.
Привод перемещения фиксаторов выпол пен в виде ходового винта 18 вместе ё закре1ленной на нем траверсой 15, установленных в корпусе 5 с воз.можцостью осевого перемещения с помощью поворотной гайки 19, соеди1-;е1пюй с червячным колесом 20,и червяка 21, связанного с электрОдвигате;1ем 22. Поворотная гайка 19, соединенная с червячным колесом 20, установлена
в корпусе с 11ОМО1ЦЫО радиально-упорных подшипников 23 и фиксирована от продольного перемепюпия.
Устройство для стонорення подвижного элемента 1 в произвольном положении относительно основания 2 работает следуюп1им o6pa3ONr.
В момент, когда подвижный элемент 1 останавливается в произвольном положении и его нужно зафиксировать в этом положении, фиксаторы 6 находятся в убранном положении, клинья 12 втянуты внутрь корпуса 5 и удерживаются в крайнем втяну1ОМ положении с помощью захватов 17 стержней 16. Пружины 14 находятся в предварительно сжатом состоянии, а пружины 9 фиксаторов 6 находятся в наименее сжатом состоянии. Скошенные концы 8 фиксаторов 6 и наклонные поверхности 13 клиньев 12 могут соприкасаться между собой или между ними может быть зазор, так как упорные пояски 10 фиксаторов 6 опираются на заплечики отверстий в корпусе 5, а величина горизонтального смещения траверсы 15 и клиньев 12 также ограничена.
При нодаче управляющего сигнала на электродвигатель (не показан) траверса 15 вместе с стержнями 16 перемещается влево. а пружины 14 перемещают влево клинья 12, которые отжи.мают вверх фиксаторы 6, преодолевая при этом сопротивление относительно слабых пружин 9. Движение траверсы 15 влево производится на заранее определенную величину, а перемещение каждого клина 12 влево нроисходит до тех нор, пока клиновый конец 7 соответствующего фиксатора 6 не упрется в зубчатую рейку 3.
Каждый фиксатор 6 упирается своим клиновым концом 7 в рейку 3 и подперт снизу клином 12, который удерживается на месте (от движения вправо) как силами трения (самоторможения), так и пружиной 14. Поэтому вертикальные распорные усилия от рейки 3 передаются через фиксатор 6 и клин 12 на корпус 5. Ввиду того, что шаг между фиксаторами 6 не кратен шагу зубчатой рейки 3, а выдержан в соотношении t tp (п + 0,75), то надежное стопорение рейки 3, а вместе с ней и подвижного элемента 1 производится в любом положении.
Расстопорение производится следуюп1.им образом.
На электродвигатель подают сигнал на реверсивную работу и перемешак т вправо траверсу 15. При этом стержни 16 захватами 17 перемещают вправо к.лннь5 12, а пружины 9 перемен1,ают фикснтор)1 6 вниз, выводя их из зацепления с .губчатой рейкой 3.
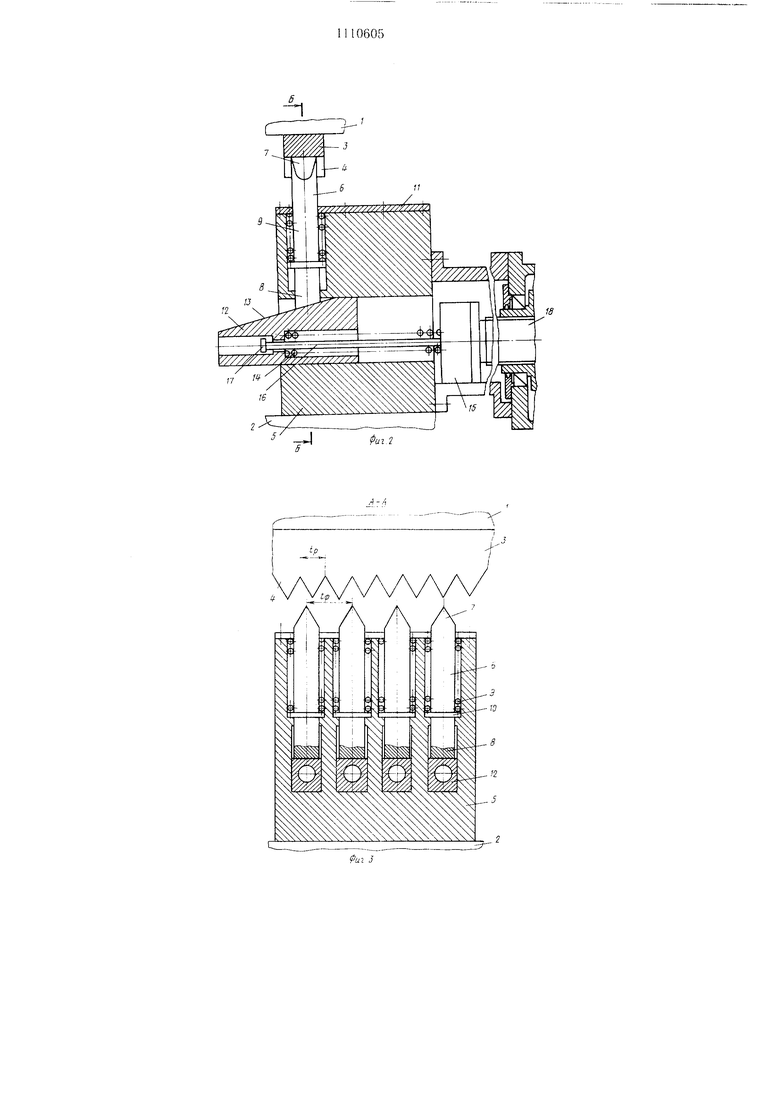
Высота перемепюния фиксаторов 6 и величина перемещений влево клиньев 12 зави сит от взаимного расположения соответствуюп1их клиновых концов 7 фиксаторов (i н зубьев 4 рейки 3. Так, на фн1. 4 предстаи.юн случай, когда один фиксатор 6 нопал точно во впадину между зубьев рейки 3 н соответствующий ему клнн 12 сдвннхт в.имю на наибольшую величину другой фиксатор попал точно на вершину зуба рейки 3 и его клин 12 сдвинут влево на наименьшую величину (этот клин не работает на .стопорение в данном случае), а остальные два фик0 сатора 6 и соответствующие им клинья 12 занимают среднее положение.
Переменхение клиньев 12 влево и польем фиксаторов 6 нроисходит одповремеиио и -одинаково, но остановка каждого к.чнна 12 и фиксатора 6 производится в разные мо5менты времени: сначала упирается в рейку 3 крайний справа фиксатор (t)Hi 4) и останавливает соответствующий клин 12, пружина 14 которого при дальпейп1ем движении влево траверсы 15 сжимается, затем упи0 раются в рейку 3 крайний левый фиксатор и третий слева (Ьиксатор, останавливая соответствуюпи1е клинья 12, пружины 14 которых при дальпейц ем движении траверсы 15 влево сжимаются, затем упирается в рейку 3 второй с.чева фиксатор 6 и останав.пи5вает соответствующий клин 12, нружина которого при дальнейп ем движении траверсы 15 сжимается. затем траверса 15 перемен1ается влево на заданное расстояние и останавливается, обеспечивая зазор между
0 захватом 17 и упором в клине 12, соответствую1цим самому выдвинутому фиксатору 6 При расстопорении происходит обратное: траверса 15 движется вправо и сначала захватывает кли-н 12 наиболее выдвинутого фиксатора 6, затем захватывает клинья
менее выдвинутых фиксаторов 6. Таким образом, одни.м движением траверсы 15 обеспечивается фиксация всех фиксаторов 6, поднимаемых на разную высоту, а также их последовательная расфиксация.
Q Определение необходимого ко,пичества фиксаторов и шага между ними производилось с учетом требований надежности, при стопорении рейки в каждом возможном движении (вправо и,1и влево) рейка должна удерживаться не менее чем двумя фиксато5 , а их общая контактная площадь до.чжна быт1 не менее боковой поверхности зуба рейки. Если требования по надежности нонып1ены, то число фиксаторов можно. н 1пример, удвоить, а таг между ними сохраiiHTii: или не.11чит1 поперечные pa:mepi i (ри1 ситоров и 1111рн 11 1 рейки.
Применяется четыре фиксатора с шагом между ними tp (n + 0,75). где п - 1.2, 3... На чертеже пока: ан ко.мпактный вариант, когда 1.75tp. (n - ). В каждом
5 возможно.м с.1 чае зацепление фиксаторов с зубьями рейки обеспечивает надежность стопорения.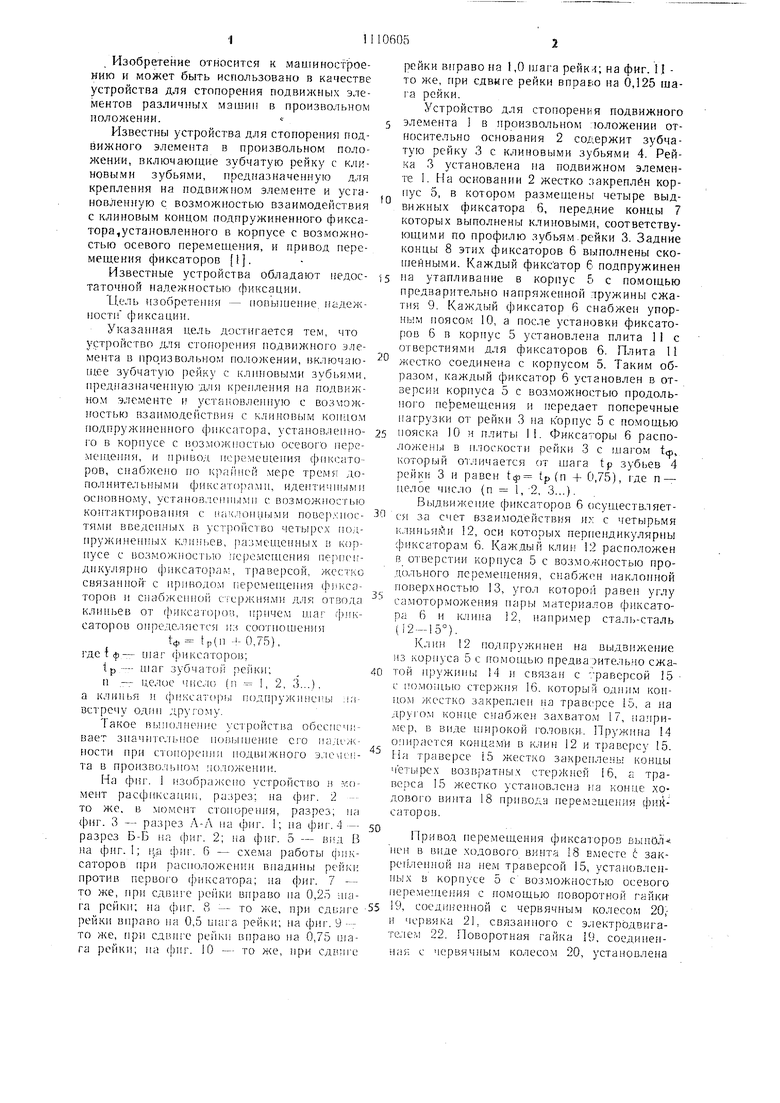
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стопорения поворотной части машины | 1984 |
|
SU1210164A1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1998 |
|
RU2129091C1 |
| Механизм установки нижнего валка прокатной клети | 1980 |
|
SU908439A1 |
| Станок для прецизионной прорезки заготовок | 1978 |
|
SU747730A1 |
| Устройство для подачи материалаВ РАбОчую зОНу шТАМпА | 1978 |
|
SU816629A1 |
| Автоматическая транспортная тележка | 1985 |
|
SU1323365A1 |
| Загрузочное устройство | 1979 |
|
SU861005A1 |
| Наклонная подвесная канатная дорога | 1959 |
|
SU132558A1 |
| Устройство для выборочного печатания | 1985 |
|
SU1433839A1 |
| Устройство для шагового перемещения исполнительного органа установки для подачи материала в зону обработки | 1987 |
|
SU1433586A1 |
УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА В ПРОИЗВОЛЬНОМ ПОЛОЖЕНИИ, включающее зубчатую рейку с клиновыми зубьями, предназначенную для крепления на подвижном элементе и установленную с возможностью взаимодействия с клиновым концом подпружиненного фиксатора, установленного в корпусе с возможностью осевого перемещения, и привод перемещения фиксаторов, отличающееся тем. что, с целью повышения надежности стопорения, устройство снабжено по крайней мере тремя дополнительными фиксаторами, идентичными основному, установленными с возможностью контактирования с наклонными поверхностями введенных в устройство четырех подпружиненных клиньев, размещенных в корпусе с возможностью перемещения перпендикуля.рно фиксаторам, траверсой, жестко связанной с приводом пере.мещения фиксаторов и снабженной стержнями для отвода клиньев от фиксаторов, причем щаг фиксаторов определяется из соотноп1ения t - tp (п -V 0,75), где1ф- Hjai- фиксаторов; tР- шаг зубчатой рейкн; с: п - целое число (п I, 2, 3...), а к.шнья и фиксаторы подпружинены наСЛ встречу один дру1ому. О о: о ел
Вид б поВернцто
Фиг.16
VVVv
Л
л / л /
хА л л л А А /
V у vVvWY
/ А / л
/ л Л А А Л Л
VyvVYY wV
/А ГЛ) Л (Л
Л Л Л
А
А Л Л Л Л А А .
VTV у
л А) А
J
J
J
А А АЛА л л л /
Л А
УууА/ у V/yVV Д 1 А |А
ЛА /
Iui.W
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Делительное устройство | 1976 |
|
SU601136A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
