и
«7 S 9 J7 21 2г 4-гН| J 5В5 25 2 3d SZ 51 50
i /I / Г I i-x т i ,
-j
1 J/ 272 IB га 52 3Q
:
iuc
л о,
W jjOilOO lO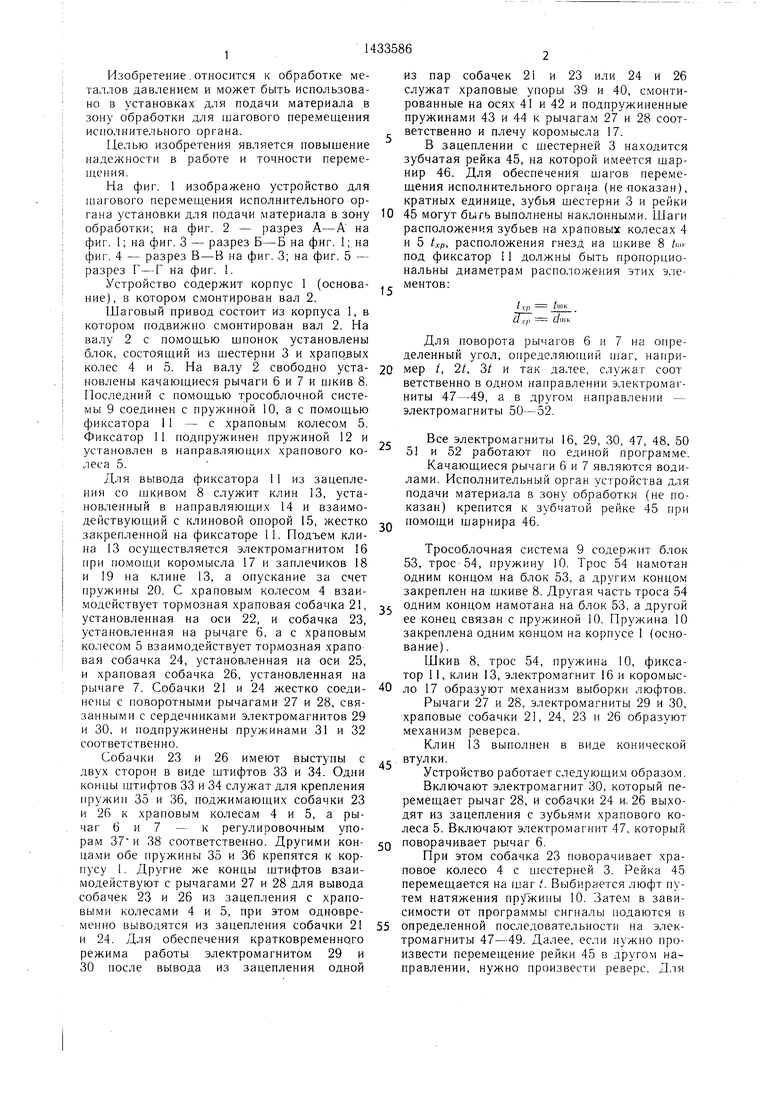
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи штучных заготовок из магазина | 1983 |
|
SU1159697A1 |
| Храповой механизм | 1986 |
|
SU1395884A1 |
| Устройство для вырубки деталей из полосового материала | 1979 |
|
SU854518A1 |
| Устройство Кривовязюка для вырубки заготовок из полосового и ленточного материала | 1980 |
|
SU946734A2 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство Кривовязюка для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU871925A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU899210A1 |
| Станок для шаговой подачи листовой резины на обработку | 1972 |
|
SU438547A1 |
| Устройство для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU871926A1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |

Изобретение относится к обработке ета. 1. 1ов дав.чением, в частности к устройствам д. 1Я не|1емен1.ения исполнительны.х органов. Целью изобретения является новышение надежности в работе и точности перемещения. 11спо.1ните, 1ЬиыГ| орган приводится в движение от зубчатой рейки 4а. Зубчатая рейка подвижно установ.чена в корпусе и входит во взаимодействие с И1естер11ей 3. закрепленной на . На валу закрсн. юиы два храповых колеса (ХК) 4 и 5 и свободис установлены два рычага 27 и 28. каждом из рычагов закрой. ienhi нодпружинснн1)1(. храновые собачки с возможностью взаимодействия каждой из иих с одним из .К. Рычаги связаны с приводом, выполненным в виде электромагнитов 29 и 30. В кор- иусе устаиовлен клии. нриводимый в Д1;и- жеиие вдоль вала от допо.шительиого :1лек- тромагнита 16 через Н1арнирно закрен..ен- ный двуплечий рычаг. На ХК смонтировап с возмол ностью перемеп1ения в . направлении и взаимодействия с ва.юм иод- пр жиненный фиксатор. На креплена клиновая опора, взаимодеипвую- П1ая с клином. На валу закреи.чеп HIKHB, па котором закреплен одпн копен гроса. , 1|пгой конец троса через пружину растяжепня ciui зан с корпусом. 3 з.н.ф-. 5 in. S
Фиг1
Изобретение.относится к обработке металлов давлением и может быть использовано в установках для подачи материала в зону обработки для шагового перемещения исполнительного органа.
1Делью изобретения является повышение надежности в работе и точности перемещения.
На фиг. 1 изображено устройство для шагового перемещения исполнительного ориз пар собачек 21 и 23 или 24 и 26 служат храповые упоры 39 и 40, смонтированные на осях 41 и 42 и подпружиненные пружинами 43 и 44 к рычагам 27 и 28 соответственно и плечу коромысла 17.
В зацеплении с шестерней 3 находится зубчатая рейка 45, на которой имеется шарнир 46. Для обеспечения шагов перемещения исполнительного органа (не-показан), кратных единице, зубья шестерни 3 и рейки
гана установки для подачи материала в зону 10 45 могут быть выполнены наклонными. Шаги обработки; на фиг. 2 - разрез А-А на расположения зубьев на храповых колесах 4
и 5 хр
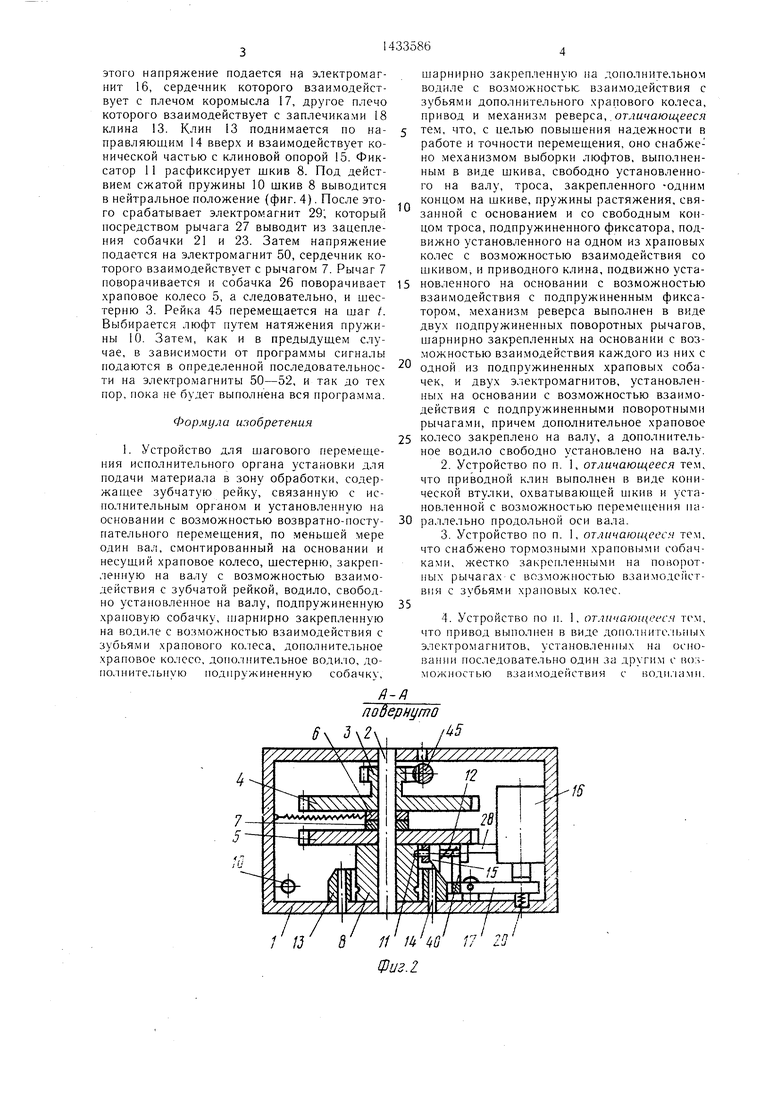
фиг. I; на фиг. 3 - разрез Б-Б на фиг. 1;. на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 1.
Устройство содержит корпус 1 (основа- , ние), в котором смонтирован вал 2.
Шаговый привод состоит из корпуса 1, в котором подвижно смонтирован вал 2. На валу 2 с помощью щпонок установлены блок, состоящий из щестерни 3 и храповых колес 4 и 5. На валу 2 свободно уста- 20 новлены качающиеся рычаги 6 и 7 и щкив 8. Последний с помощью трособлочной системы 9 соединен с пружиной 10, а с помощью фиксатора 11 - с храповым колесом 5. Фиксатор 11 подпружинен пружиной 12 и установлен в направляющих храпового ко- - леса 5.
Для вывода фиксатора 1 1 из зацепления со шкивом 8 служит клин 13, установленный в направляюших 14 и взаимодействующий с клиновой опорой 15, жестко р, закрепленной на фиксаторе II. Подъем клина 13 осуществляется электромагнитом 16 при помощи коромысла 17 и заплечиков 18 и 19 на клине 13, а опускание за счет пружины 20. С храповым колесом 4 взаимодействует тормозная храповая собачка 21, установленная на оси 22, и собачка 23, установленная на рычаге 6, а с храповым колесом 5 взаимодействует тормозная храповая собачка 24, установленная на оси 25, и храповая собачка 26, установленная на рычаге 7. Собачки 21 и 24 жестко соединены с поворотными рычагами 27 и 28, связанными с сердечниками электромагнитов 29 и 30, и подпружинены пружинами 31 и 32 соответственно.
Собачки 23 и 26 имеют выступы с двух сторон в виде щтифтов 33 и 34. Одни концы 1ПТИФТОВ 33 и 34 служат для крепления пружин 35 и 36, поджимающих собачки 23 и 26 к храповым колесам 4 и 5, а рычаг 6 и 7 - к регулировочным упорам 37 и 38 соответственно. Другими концами обе пружины 35 и 36 крепятся к корпусу 1. Другие же концы штифтов взаимодействуют с рычагами 27 и 28 для вывода собачек 23 и 26 из зацепления с храповыми колесами 4 и 5, при этом одновременно выводятся из зацепления собачки 21 и 24. Для обеспечения кратковременного режима работы электромагнитом 29 и 30 после вывода из зацепления одной
40
45
55
расположения гнезд на шкиве 8 /и под фиксатор 11 должны быть пропорциональны диаметрам расположения этих элементов:
txp tuiK
37 dill к
Для поворота рычагов 6 и 7 на определенный угол, определяющий шаг, например t, 2/, 3/ и так далее, служат соот ветственно в одном направлении электрома - ниты 47-49, а в другом направлении - электромагниты 50-52.
Все электромагниты 16, 29, 30, 47, 48, 50 51 и 52 работают по единой програм.ме
Качающиеся рычаги 6 и 7 являются води- лами. Исполнительный орган устройства для подачи материала в зону обработки (не показан) крепится к зубчатой рейке 45 при помощи щарнира 46.
Трособлочная система 9 содержит блок 53, трос-54, пружину 10. Трос 54 намотан одним концо.м на блок 53, а други.м концом закреплен на шкиве 8. Другая часть троса 54 or одним концом намотана на блок 53, а другой ее конец связан с пружиной И). Пружина 10 закреплена одним концом на корпусе 1 (основание) .
Шкив 8, трос 54, пружина 10, фиксатор 11, клин 13, электромагнит 16 и коромысло 17 образуют механизм выборки люфтов.
Рычаги 27 и 28, электромагниты 29 и 30, храповые собачки 21, 24, 23 н 26 образуют механизм реверса.
Клин 13 выполнен в виде конической втулки.
Устройство работает следующим образом.
Включают электромагнит 30, который перемещает рычаг 28, и собачки 24 и. 26 выходят из зацепления с зубьями храпового колеса 5. Включают электромагнит 47, который 5Q поворачивает рычаг 6.
При этом собачка 23 поворачивает храповое колесо 4 с шестерней 3. Рейка 45 перемещается на шаг i. Выбирается люфт путем натяжения пр/жины 10. Затем в зависимости от программы сигналы подаются в определенной последовательности на электромагниты 47-49. Далее, если нужно произвести перемещение рейки 45 в другом направлении, нужно произвести реверс. Для
из пар собачек 21 и 23 или 24 и 26 служат храповые упоры 39 и 40, смонтированные на осях 41 и 42 и подпружиненные пружинами 43 и 44 к рычагам 27 и 28 соответственно и плечу коромысла 17.
В зацеплении с шестерней 3 находится зубчатая рейка 45, на которой имеется шарнир 46. Для обеспечения шагов перемещения исполнительного органа (не-показан), кратных единице, зубья шестерни 3 и рейки
45 могут быть выполнены наклонными. Шаги расположения зубьев на храповых колесах 4
и 5 хр
расположения гнезд на шкиве 8 /и под фиксатор 11 должны быть пропорциональны диаметрам расположения этих элементов:
txp tuiK
37 dill к
Для поворота рычагов 6 и 7 на определенный угол, определяющий шаг, например t, 2/, 3/ и так далее, служат соот ветственно в одном направлении электрома - ниты 47-49, а в другом направлении - электромагниты 50-52.
Все электромагниты 16, 29, 30, 47, 48, 50 51 и 52 работают по единой програм.ме.
Качающиеся рычаги 6 и 7 являются води- лами. Исполнительный орган устройства для подачи материала в зону обработки (не показан) крепится к зубчатой рейке 45 при помощи щарнира 46.
р,
0
5
5
Трособлочная система 9 содержит блок 53, трос-54, пружину 10. Трос 54 намотан одним концо.м на блок 53, а други.м концом закреплен на шкиве 8. Другая часть троса 54 r одним концом намотана на блок 53, а другой ее конец связан с пружиной И). Пружина 10 закреплена одним концом на корпусе 1 (основание) .
Шкив 8, трос 54, пружина 10, фиксатор 11, клин 13, электромагнит 16 и коромысло 17 образуют механизм выборки люфтов.
Рычаги 27 и 28, электромагниты 29 и 30, храповые собачки 21, 24, 23 н 26 образуют механизм реверса.
Клин 13 выполнен в виде конической втулки.
Устройство работает следующим образом.
Включают электромагнит 30, который перемещает рычаг 28, и собачки 24 и. 26 выходят из зацепления с зубьями храпового колеса 5. Включают электромагнит 47, который Q поворачивает рычаг 6.
При этом собачка 23 поворачивает храповое колесо 4 с шестерней 3. Рейка 45 перемещается на шаг i. Выбирается люфт путем натяжения пр/жины 10. Затем в зависимости от программы сигналы подаются в определенной последовательности на электромагниты 47-49. Далее, если нужно произвести перемещение рейки 45 в другом направлении, нужно произвести реверс. Для
этого напряжение подается на электромагнит 16, сердечник которого взаимодействует с плечом коромысла 17, другое плечо которого взаимодействует с заплечиками 18 клина 13. Клин 13 поднимается по направляющим 14 вверх и взаимодействует конической частью с клиновой опорой 15. Фиксатор 11 расфиксирует шкив 8. Под действием сжатой пружины 10 шкив 8 выводится в нейтральное положение (фиг. 4). После этого срабатывает электромагнит 29; который посредством рычага 27 выводит из зацепления собачки 21 и 23. Затем напряжение подается на электромагнит 50, сердечник которого взаимодействует с рычагом 7. Рычаг 7 поворачивается и собачка 26 поворачивает .храповое колесо 5, а следовательно, и шестерню 3. Рейка 45 перемещается на шаг /. Выбирается люфт путем натяжения пружины 10. Затем, как и в предыдущем случае, в зависимости от программы сигналы подаются в определенной последовательности на электромагниты 50-52, и так до тех пор, пока не будет выполнена вся програ.мма.
Формула изобретения
подернуто .
/7//////} ///Х/
C
/
шарнирно закрепленную на дополнительном водиле с возможностью взаимодействия с зубьями дополнительного храпового колеса, привод и механизм реверса,, ог,ичаю1г ееся
тем, что, с це„1ью повышения надежности в работе и точности перемещения, оно снабже- но механизмом выборки люфтов, выполненным в виде шкива, свободно установленного на валу, троса, закрепленного -одним
.. концом на щкиве, пружины растяжения, связанной с основанием и со свободным концом троса, подпружиненного фиксатора, подвижно установленного на одном из храповых колес с возможностью взаимодействия со шкивом, и приводного клина, подвижно уста5 новленного на основании с возможностью взаимодействия с подпружиненным фиксатором, механизм реверса выполнен в ви.ае двух подпружиненных поворотных рычагов, шарнирно закрепленных на основании с возможностью взаи.модействия каждого из них с одной из подпружиненных храповых собачек, и двух электромагнитов, установленных на основании с возможностью взаимодействия с подпружиненными поворотными рычагами, причем дополнительное храповое
5 колесо закреплено на валу, а дополнительное водило свободно установлено на валу.
0
5
Х/
1
У/ 1 ///777///////,
12
к
L
i I 28
// 17 Фиг. I
6-Б
6 45 ii7 kS 6 23 JJ27J52 J jff
L 1 I / II, /
.. чО
7q Ж- . .
- J. / 1 iXi- i-f J
у /
. -г
yit iVi ;:
52 51 50
ID
лллл/у лллм/ /
ю
/
| Малов А | |||
| Ы | |||
| и Прейс В | |||
| Ф | |||
| Ме.хани- зация и автоматизация штамповочны.х работ | |||
| М: Мапл-из, 1955, с | |||
| Ребристый каток | 1922 |
|
SU121A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Кожевников С | |||
| Н., Есипенко Я | |||
| И | |||
| и Рас- кин Я | |||
| М | |||
| ..ханиз.мы | |||
| М.: MauiHiiOCTpoe- ние | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Способ пропитывания дерева | 1921 |
|
SU446A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
