тали. Целью и обретенмя яялястся вьшение наздежности н VT roiui HHC С ;сте- мы упраштения, (то iiocritraeTCH aii счет снабжения подг-,еикой платформы само11е трируюпцюкся опорам ;. Б корпусе платформь эа. опорые у,-- лы, включающие я себя втулки 19, яя- лы 23 с зуй гаток пар1;зкой. На фаак-- це 24 этих залоа установлена сфериf ,
Изобретение относлтся к тракс.::ор гнон технике i может нсгзсл;ьзо Я но в устройствах дли смены крупкс - габаритных модулей, размещенных в
опорном сооружении ЛО одной Г ОрИ ОН
тальной плоскости.
Целью изобретение явгпче ск ,4- шение надежности к упрогаенве си Г. управления.
Поставленная цепь ;юс.тигайгсл там, что под ье:-шая пла1 фо;рмй авгомл-- тической транспортйой тслежкк снабжается сзмоцеитрирясчд имися опорчьгмк узлами.
г
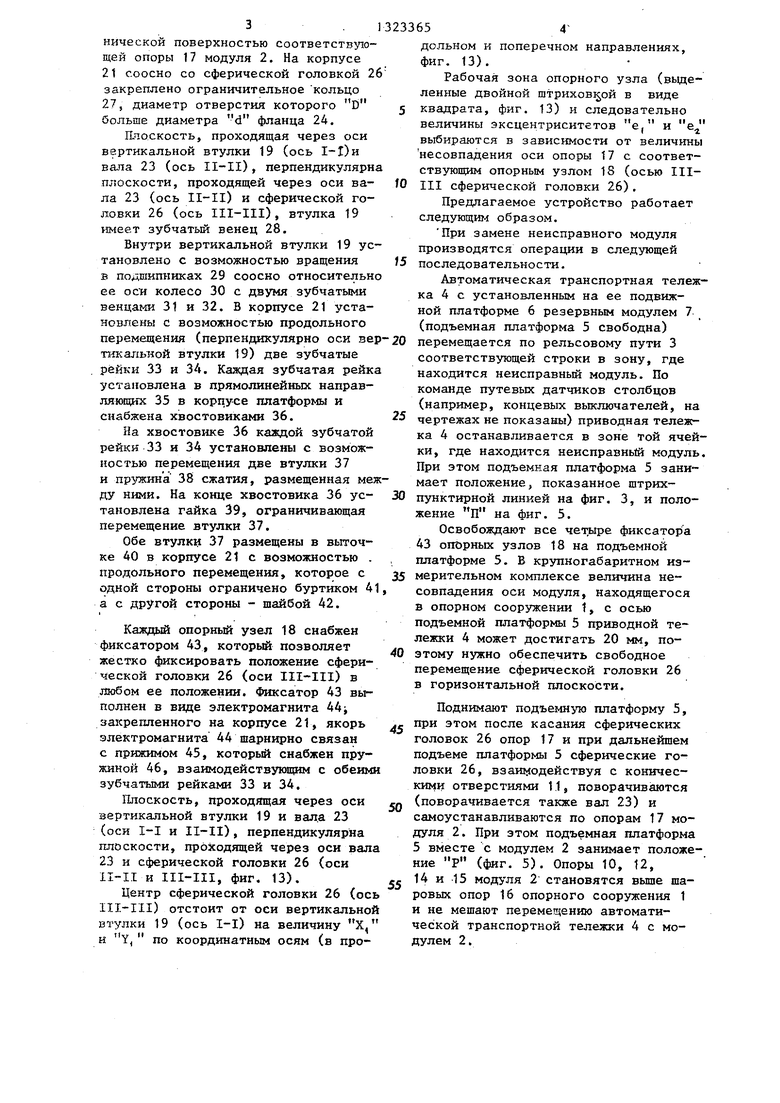
На фиг. 1 изображено уотройстио; общий вид; на фиг. 2 - вид А иа фиг. li на фиг, 3 - узел I па Фиг. на фиг. 4 раггрез ь--В ка фкг., 1.; на фиг. 5 видВнафнг, .;
таковки модуля; на 6 - разрез Г-Г яз. фиг, 3; яа фиг 7 -- глсемг расположения опор кк модуле при ИРГ- . де на него сниззч н Фи;:% 8 - рез Д-Д на фиг. 7; па. фи:г„ 9 разрез Е-Е на фиг. 7; кя фнг 10 - сх.е ма расположения опор sia. подъемкой платформе), на фиг, 11 - paspHS Ж-Ж на фиг. 10; на фк:г.: . на фиг.lit на фиг. Е 3 ложения рабочей зонь фиг, 14 разрез И-И на на фиг, 15 разрез И.зeрительньй к.о.пле состоит из опо15ного сосруженик I , в ячейках которог о размещйкы модуш 2 по строчно-столбцсвой сзсено iTci.u каддой строкой модулей 2 pacnojiCJatH рельсозый путь 3, иа которсж устакав лгна автокатн ччскйя тр;; ксясртяйя то- лежка 4 с подъемньал гглатформа ми 5 н 6 для усл аноБки на кк:х. ксду- лей 2,.
З-З распо- onopbd :rf6 фкг, 1Н ка ,. i i с , О
ческая головка
Бозможиость:с
;;рй цекия. Лри Бзаимодейстани с ьголу- лен 110 ряботы сферические го- лоБкя попадают в конические отзер- CTKR опор модуля и самоустаяавлива- rvTCfi, Далее фкксатором5 включающим в себя ройкн 33 к 3i, сферическая головкл фиксируется в этом попожанни. 3 i i. ф-,ты I 1 5 ил.
-
0
;,
25
2
платформа 5 свободна, а ка пол: ье.мно.а -гглатформе 6 установлен резервный модуль 7,
Опорное сооружеирге 1 установлено кя стойках В,
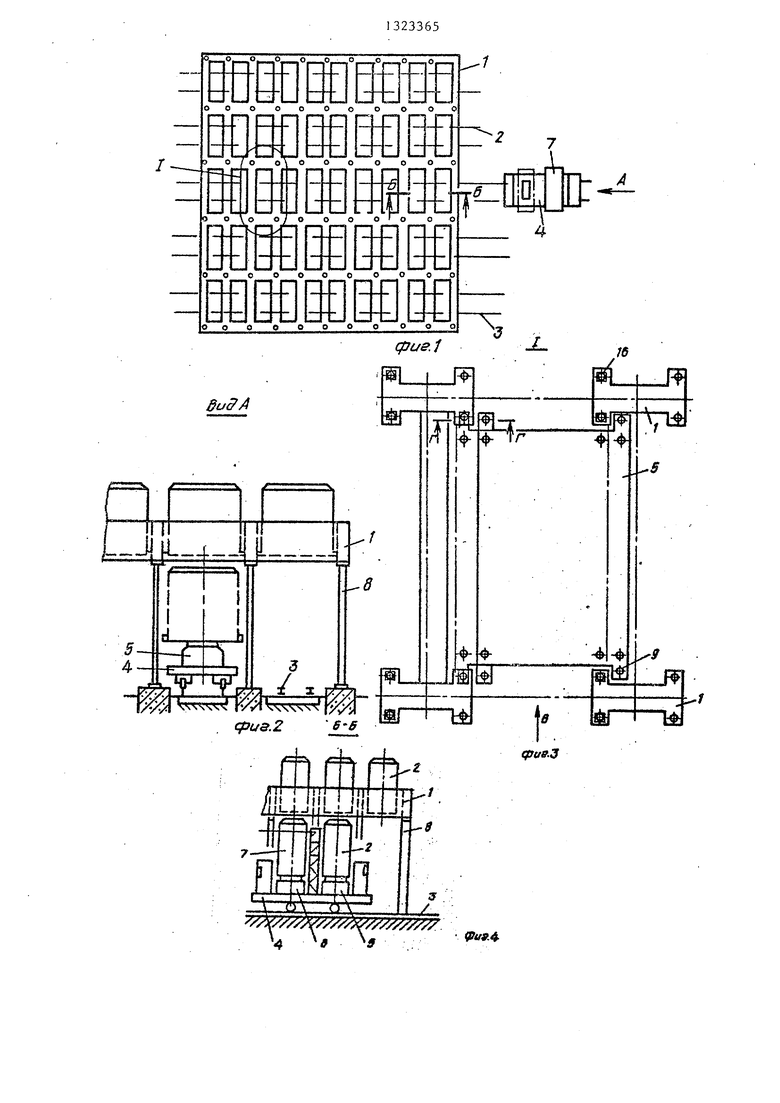
Модули 2 и резервные модули 7 K.,...H сня. гу снабжен четырьмя опорами, ycTaiSOBJtenHbKH на кронютейкак 9 .фкг. 7)j одна из которых (tC) вы- иолненй в взде втулкк с кони -геским отверстием 11, втсфая опора 12 вьшол- яена в ВИДЬ приз:- ;ы с иак.тонкыми позерхмостями 13, третья 14 н четнер- тая 15 ояорь иьйюлкекьг плоскиьги з ввд.е огюркой няты .
Опоры 10, 12, 14 н 15 о6е.спе-4};ваг .. ют самоцйктрирование модуля 2 при устаков.ке его в опорное сооружатше i 5 на КОТ-ОУО.М закреплены шаровые опоры 16. опор 10, 12J 14 н 5 5 каждый модуль 2 снабжен чет 1рьмя опоранн 16 f кажр.ая нэ которьп: по конструкции аналогична опоре 12, Опоры 17 расположйны по углам модуля 2.
iia ка.1сдой подаренной платфорне 5 и 6 установлены соответствующие
опорам 17 четьфе опорных узла 18. i
Каждый onopHbtft узел 18 выполнек
Б виде ВТУ.ПКИ 19, установленной с возможностью поворота на подшипниках 20 в корпусе 21, закрегшеннон на подъемной платформе 5(6), Внутри зартккаль.ной втулки 19 эксл,ентр1тчко (.- эксдентркситетом е ,.,) установлен с нозможностыо Г оворота з подгоипкк- ках 22 ва.л 23 с зубчатой каразкой с фланцем 2 ; на керхнен Конце, На флайде 2ч зкс гйктрично (с эксцентриситетом e.j) относительно оси вала 2.3 установлена с возмолсяостью пово-. рота в подшипниках 25 сфсрич екая го.повка 26, взанмодейств тощгя с конической поверхностью соответствующей опоры 17 модуля 2. На корпусе 21 соосно со сферической головкой 26 закреплено ограничительное кольцо 27, диаметр отверстия которого D больше диаметра d фланца 24.
Плоскость, проходящая через оси вертикальной втулки 19 (ось 1-1)и вала 23 (ось II-II), перпендикулярна плоскости, проходящей через оси ва- ла 23 (ось II-II) и сферической головки 26 (ось Ill-Ill), втулка 19 имеет зубчатый венец 28.
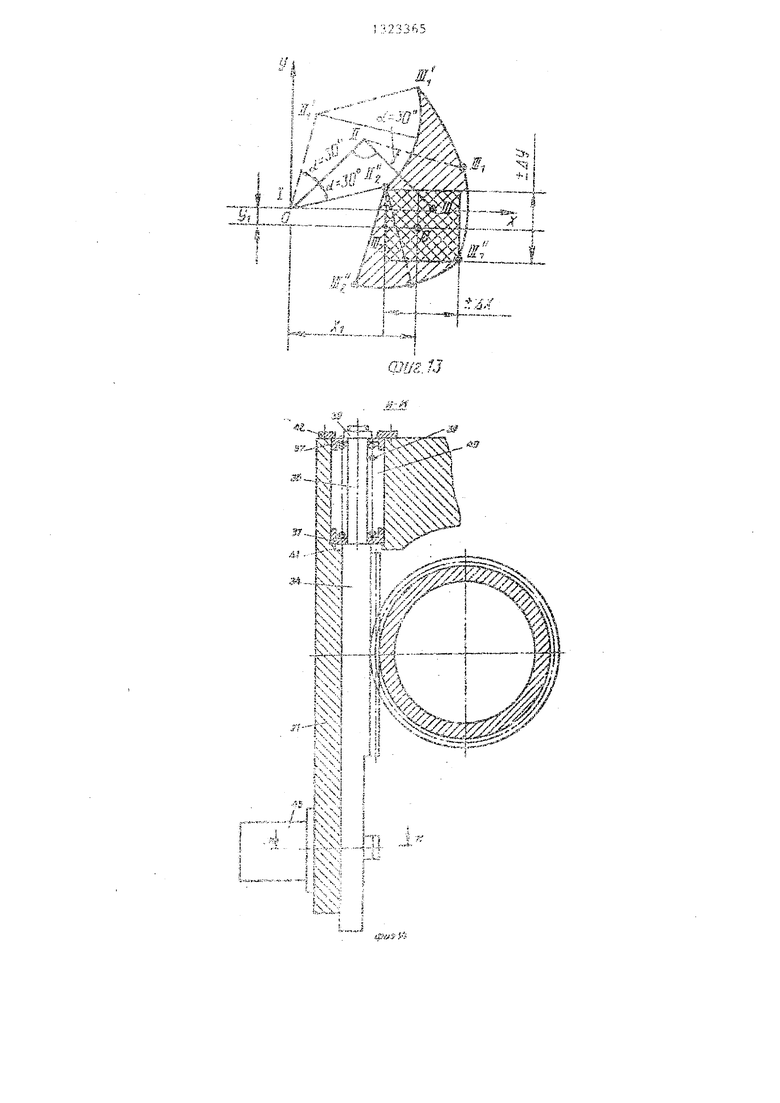
Внутри вертикальной втулки 19 установлено с возможностью вращения в подшипниках 29 соосно относительно ее ости колесо 30 с двумя зубчатыми венцами 31 и 32. В корпусе 21 установлены с возможностью продольного перемещения (перпендикулярно оси вер тикальной втулки 19) две зубчатые рейки 33 и 34. Каждая зубчатая рейка установлена в прямолинейных направляющих 35 в корцусе платформы и снабжена хвостовиками 36.
На хвостовике 36 каждой зубчатой рейкк 33 и 34 установлены с возможностью перемещения две втулки 37 и пружина 38 сжатия, размещенная между ними. На конце хвостовика 36 ус- тановлена гайка 39, ограничивающая перемещение втулки 37.
Обе втулки 37 размещены в выточке 40 в корпусе 21 с возможностью . продольного перемещения, которое с одной стороны ограничено буртиком 41 а с другой стороны - шайбой 42.
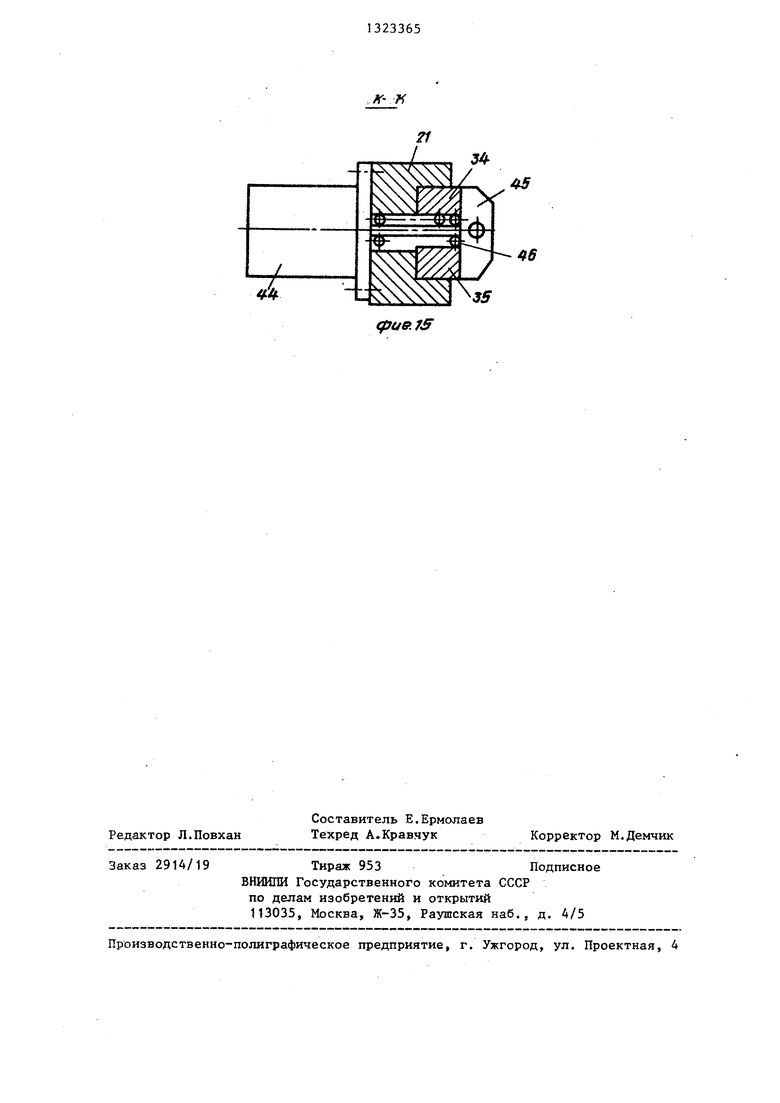
Каждый опорный узел 18 снабжен фиксатором 43, который позволяет жестко фиксировать положение сферической головки 26 (оси Ill-Ill) в любом ее положении. Фиксатор 43 выполнен в виде электромагнита 44j закрепленного на корпусе 21, якорь электромагнита 44 шарнирно связан с прижимом 45, котррьй снабжен пружиной 46, взаимодействукицим с обеими зубчатыми рейками 33 и 34.
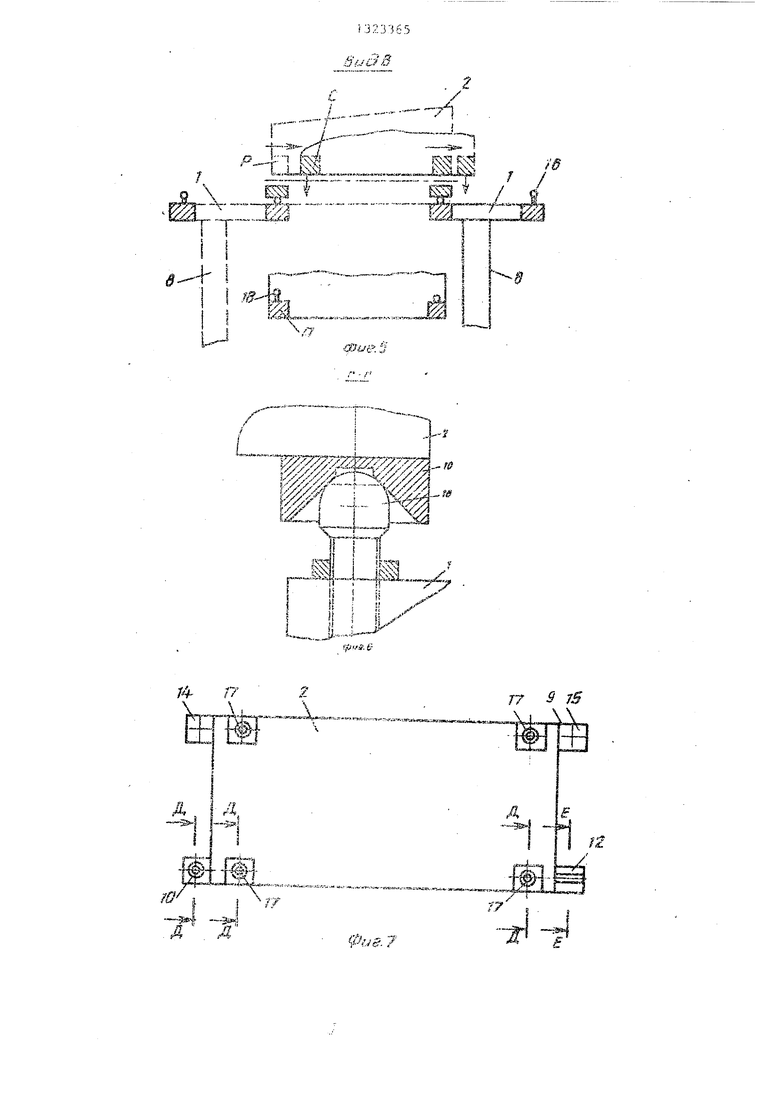
Плоскость, проходящая через оси вертикальной втулки 19 и вал.а 23 (оси I-I и II-II), перпендикулярна плоскости, проходящей через оси вала 23 и сферической головки 26 (оси II-II и Ill-Ill, фиг. 13).
Центр сферической головки 26 (ось Ill-Ill) отстоит от оси вертикальной втулки 19 (ось I-I) на величину X,
и
Y, по координатным осям (в про
O
5 0 5
0
5
Q с
0
дольном и поперечном направлениях, фиг. 13).
Рабочая зона опорного узла (выделенные двойной штрихов1 ой в виде квадрата, фиг. 13) и следовательно величины эксцентриситетов е, и е выбираются в зависимости от величины несовпадения оси опоры 17 с соответствующим опорным узлом 18 (осью III- III сферической головки 26).
Предлагаемое устройство работает следующим образом.
При замене неисправного модуля производятся операции в следующей последовательности.
Автоматическая транспортная тележка 4 с установленным на ее подвижной платформе 6 резервным модулем 7 (подъемная платформа 5 свободна) перемещается по рельсовому пути 3 соответствующей строки в зону, где находится неисправный модуль. По команде путевых датчиков столбцов (например, концевых выключателей, на чертежах не показаны) приводная тележка 4 останавливается в зоне той ячейки, где находится неисправньй модуль. При этом подъемная платформа 5 занимает положение, показанное штрих- пунктирной линией на фиг. 3, и положение П на фиг. 5.
Освобождают все четыре фиксатора 43 опорных узлов 18 на подъемной платформе 5. В крупногабаритном измерительном комплексе величина несовпадения оси модуля, находящегося в опорном сооружении 1, с осью подъемной платформы 5 приводной тележки 4 может достигать 20 мм, поэтому нужно обеспечить свободное перемещение сферической головки 26 в горизонтальной плоскости.
Поднимают подъемную платформу 5, при этом после касания сферических головок 26 опор 17 и при дальнейщем подъеме платформы 5 сферические головки 26, взаи1;«одействуя с коничес- кими отверстиями 1.1, поворачиваются (поворачивается также вал 23) и самоустанавливаются по опорам 17 модуля 2. При этом подъемная платформа 5 вместе с модулем 2 занимает положение Р (фиг. 5). Опоры 10, 12, 14 и 15 модуля 2 становятся выше шаровых опор 16 опорного сооружения 1 и не мешают перемещению автоматической транспортной тележки 4 с модулем 2.
Производят фиксирование оп.от.-нь .к узлов 18 на noдъe ;нoй платформе : с помощью фиксаторов V3, фиксирс:..- ние опорных уз.чог. 1 В неоохадт-н-ю ..уо: того, чтобы при перед.вижеяьш npijRojV ной тележки 4 не произоаи О смещо ше мода ля 2.
Перемегдяют приводную те.пежк-у k влево, (фиг 5) ак, чтобы она :.зпк ла положение, показанное силош11ой линией ка фиг. 3 (гюложекке «а фиг. 5). При этом кронштейны 9 модуля 2 находятся в вырезах опорного сооружения 1 .и не мешают опусканию подъемкой платформь 5. Под ьемггую платформу 5 опускаю ; .
Перемещают праводаую гелена :у по рельсовом пути 3 та.к чтобь резервный модуль 7 на подъемной платформе
6занял положение, показанное сплошной линией ка дагг. 3 под ячейкой, откуда был извлечен кеисправкьй модуль 2.
Подъемную платформу 6 подизадалот, при этом опорь 10, 12, 14, 15 МОДУЛ
7находятся вьэне шаровых спор 16 опорного сооружения 1 и не мешают перемещению приводкой тележки : ййдулем 2
Перемещают пркво.цнуЕ тележку 4 с мод Улем 7j чтобы, ее подъемная шгат- форма 6 заняла полож&ии« ка фиг. 5 (положение, показ.аь-ь ое -.штр .к пунктирной линией на фиг. 3).
Освобождают все четьфе фкксатоггз 43 опорных-узлов 18 ка яодг-емт-к й платформе.
Опускают лорл.-енную г яатформу :,, jTpH этом после к:йсаник шаровое-: -опор 16 с опорами lOj 12, 4 и 15 модуля 7 и данызейшгм опускания пол. ье. платформы 6 модуль 7 псуэмещается в горизонтальной плоскости м самоусга навлнвается на шаровых онорах 16 опорного сооружении 1.
Формула J l 3 о б
1. Азтоматк 1йская грзнспор Г{ йл тележка, содержащая подъемную г;,р;я. г с устройством ibJiKcaui-m. ггс-ед )6
иа-пачаяиую для установки и снятия кр) пногаиарит1:ьг.ч мoдyJleй, размещен- :-bK в опорком соорьокеиии, о т л л- ч а 10 щ а я с я тем,, что, с целью
I OBiviTiieHUH надежности и упрощения cjicre ib упразления, устройство фик- сацкн модуля ка платформе выполнено Б пнде нескол5 ккх опорных узлов каждьш из которых й-;еет два устаков-,
.кеиньк Б на;аравляю1цих платформы зуб- - гатых рейки5 втулку, колесо с двумя зубчатьгми хтендами, зал с зубчатой нарезкой и С(1)ерическ;уто головку, пред- назначеппу:о д.пя размещения ее в коинческом отверстия, выполненном в опоре модуляJ гфичем втулка установлена па вертикальной оси Б корпусе утпатфорж-и с возможностью ее поворота., а вал размеш,ен во атулке зксиентрично ее оси,, кроме того, на
горце вала вьашлнен фланец, на котором устакозлена с воз южностью поворота эксдентрично оси вала сферическая головкаS при этом корпус платформы снабжен закрепленным на нем ограничите льньм кольь ос-, диаметр отверстия которого прекьшает диаметр флак- цз вала, а атулха снабжена зубчатым векдом5 входящим в зацепление с первой
зубчаа ой рейкой, причем во втулке уста- юзлейо упомянутое колесо с двумя зуб- чатыг«-1 один из которых входит в зацеплгение с зубчатой нарезкой вала, другой - с второй зубгштой
рейкойS при каждая зубчатая рейка, Сггаб;- :еиа хвостовиком, на котором рз.змсщекы с возможностью перемещения две дополнктелько введенные втулки 2 прукиной между 1шм7-1, расположенные
в выточке, выполненной в корпусе плйтфору., кроме того, хагкдьй опорный узел снабжен фнхсаторо .5 сфери.СКОЙ ГОЛОЗ лК.
2, Телея.ка по п, 1, о т л и ч а- -и Д а я г, я ч ем, что фт-гксатор сфе- ри- ;еской голоекн выполнен в внде олсктромагнита; закрепленного в корпусе платфсфмьт. якорь которого aiap- пирно связан с прижимом, предказна- ченнытч ,аля з займе действия с обеими
о о о о о ооо о ор
в о о о о о о о о о о
срие.1
Ви
JL
J6
ш
Я1
ITrt
/t f
ф. ГГ
-Ф
хi
уИ X4NNNV f5v
.2 S S
.2
фи8.3
ж
тт
тг
ML1J L1J-5
т
ч
.....,9.
9 5
//
/
5
//////////
.4
SfjclB
Г
x
/
t-j«... r,«™,
-V .|-i 1
f I
l
Фие.З
tNSN
/

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая транспортная тележка | 1986 |
|
SU1458203A1 |
| ПОДЪЕМНЫЙ СТОЛ | 1998 |
|
RU2138349C1 |
| Опора для крепления модулей технологического оборудования | 1987 |
|
SU1520294A1 |
| ШВЕЙНАЯ МАШИНА ЗИГЗАГ | 1999 |
|
RU2151225C1 |
| Устройство для автоматической стыковки и расстыковки кабельного разъема | 1985 |
|
SU1327213A1 |
| Установка для снятия усилений сварных швов | 1986 |
|
SU1414525A1 |
| Грузовая тележка крана | 1986 |
|
SU1444286A1 |
| Устройство для перемещения штучных заготовок типа тел вращения | 1988 |
|
SU1516197A1 |
| Устройство для подъема палубы морской платформы | 1980 |
|
SU1037835A3 |
| Подъемный стол | 2015 |
|
RU2612116C2 |

Изобретение относится к транспортной технике и может быть использовано в устройствах для смены крупногабаритных модулей, размещенных в опорном сооружении по одной горизонJ5 JA ; IL ДуЯН fS .vjx,,-r. fo 30 фиг.71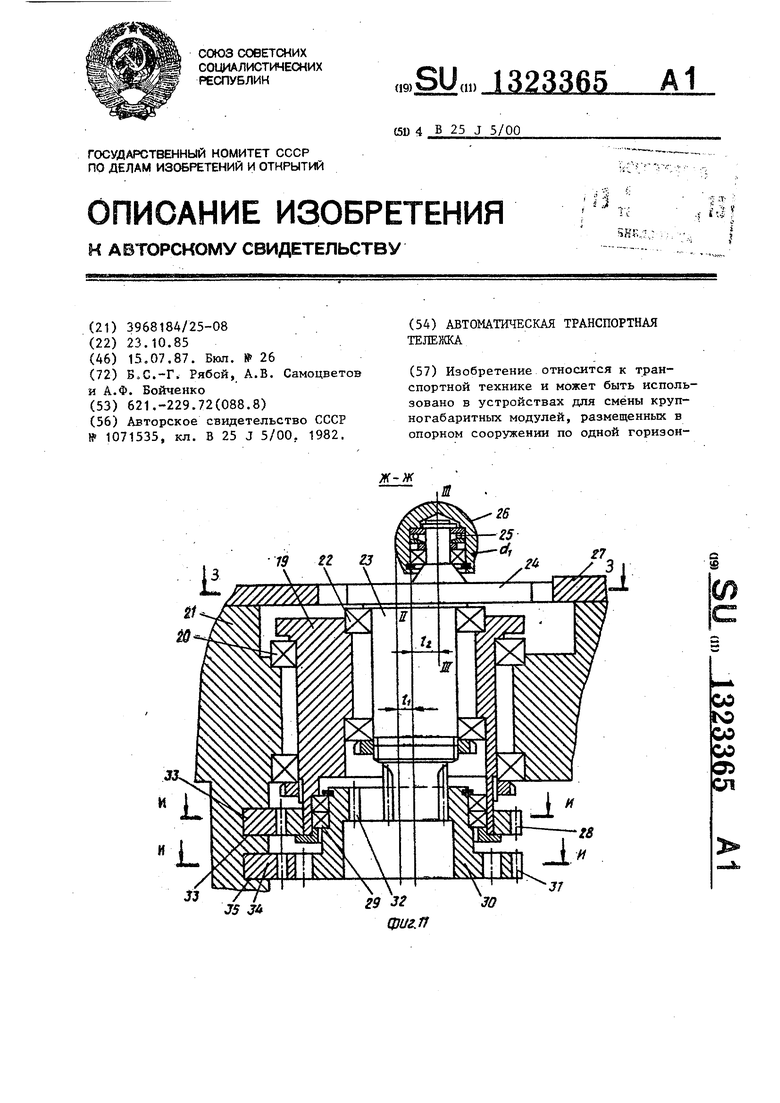
/
-f
;4
//
LLJ U,
Д . Л
n 9 7S
фиё. 7
А-А
Е-Е
gjuff.e
/
16
(ffuff.3
L
18
/
Т
Тлг
18
(puff. Г О
J8
Т
J- 3
€pttf.f2
/ ,.-i
i/..:n/«,, , /1k :i t5«i Ml
/V ,.-
X .X .л j
,x|.,..
.r,
JIi -. .-U
1---if,---|-- .--dEtn.|--.«-....
G//AJ,AJ
iSwJii;
J4
J5
Редактор Л.Повхан
Составитель Е.Ермолаев Техред А Кравнук
Заказ 2914/19
Тираж 953Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ttR7ff
Корректор М.Демчик
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
