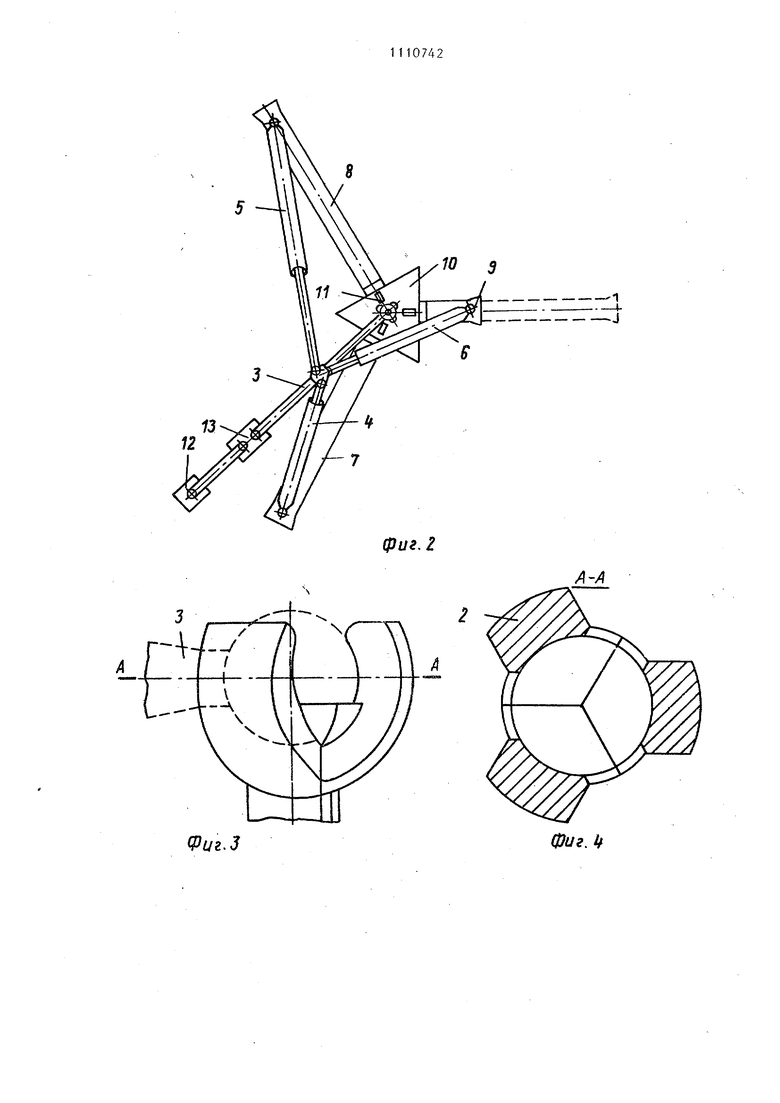
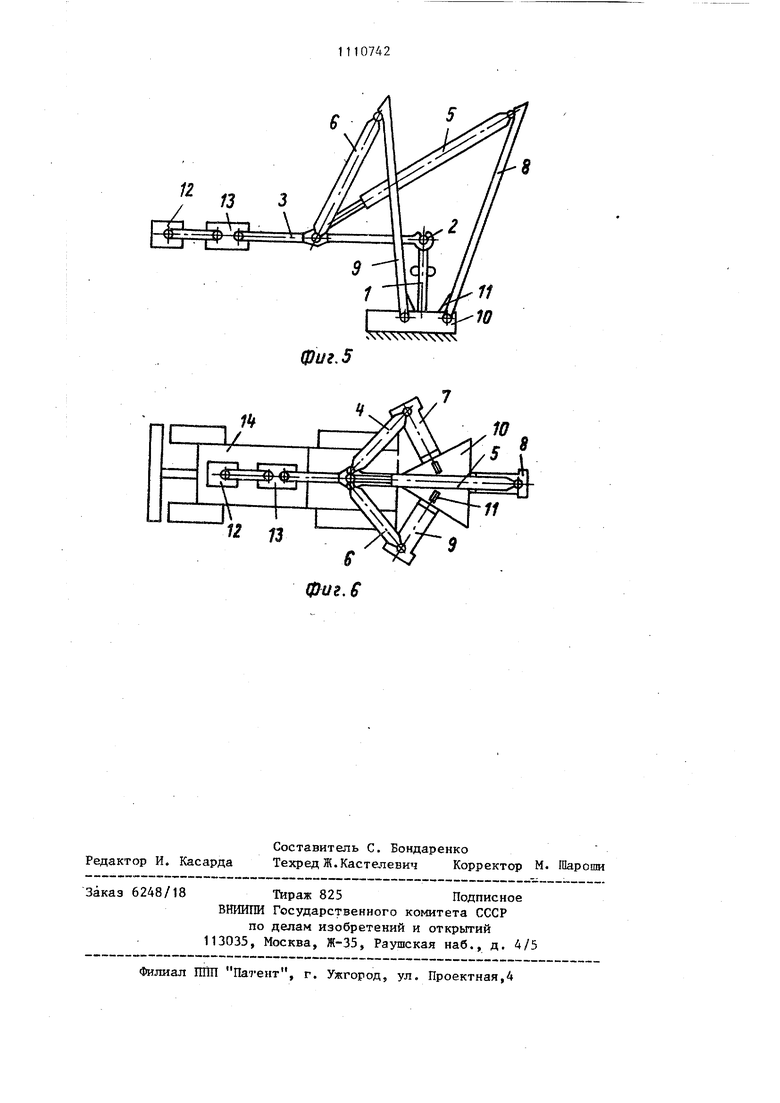
Изобретение относится к грузоподъемному машиностроению, а именно к механизмам управления стрелой и опорным устройством. Известен опорно-направляющий механизм для стреловых грузоподъемных устройств, содержащий раму с жестко закрепленной на ней колонной, с которой шарнирно связана стрела, и силовые цилиндры, штоки которых шарнирно соединены со стрелой pj. Недостатками этого устройства :являются невысокая маневренность и :значительная металлоемкость, так 1как требуется домкратирование рамы ;с использованием дополнительных опор ных механизмов для предотвращения опр окидывания маши ны. Цель изобретения - расширение зоны обслз живания грузоподъемным устройством и снижение металлоемкости. Поставленная цель достигается тем, что опорно-направляющий механизм для стреловых грузоподъемных устройств, содержащий раму с жестко закрепленной на ней колонной, с которой шарнирно связана стрела, и силовые цилиндры, штоки которых шар нирно соединены со стрелой, снабжен По меньшей мере тремя кронштейнами, равномерно расположенными относител но вертикальной оси колонны, один Конец каждого из которых посредство горизонтального шарнира закреплен н раме, а другой шарнирно связан с корпусом одного из цилиндров. При этом шарнирные соединения кронштейнов с корпусами цилиндров И стрелы с колонной выполнены сферическими, а корпус сферического шарнира колонны выполнен из трех частей с образованием между ними прорезей для размещения в них стрелы. На фиг.1 изображен предлагаемый опорно-направляющий механизм, вид сбоку; на фиг.2 - то же, вид сверху; на фиг.З - сферический шарнир колонны на фиг.4 - сечение А-А на фиг.З; на фиг.З - опорно-направляющий механизм транспортное положение, вид сбоку; на фиг.6 - то же, вариант компановюг с транспортным средством, транспортное положение, вид сверху. Опорно-направляющий механизм для грузоподъемных устройств содержит колонну 1, в которой смонтирован сфе рический шарнир 2, связьшающий колон 422 ну со стрелой 3, к которой посредством сферических шарниров с трех сторон крепятся штоки гидроцилиндров 4-6, корпуса которых шарнирно связаны с кронштейнами 7-9, шарнирно закрепленными на неподвижной раме 10 и имеюш тми возможность поворачиваться от упоров 11, установленных на раме до поверхности грунта (угол d ). Корпус сферического шарнира 2 выполнен из трех частей, между которыми в сборе образуются прорези для большего наклона стрелы 3, которая соединяется с рабочим органом 12 посредством изгибающего звена 13, при зтом опорно-направляющий механизм может быть использован с транспортным средством 14, Опорно-направляющий механизм работает следуюшим образом. Для перевода устройства из транспортного положения Б рабочее, выдвигаются штоки двух гидроцилиндров, например гидроцштиндров 4 и 5. При этом кронштейны 7 и 8 опускаются до контакта с грунтом и стрела 3 перемещается в любую точку сектора между лапами 7 и 8 в зависимости от степени выдвижения штоков гидроцилиндров. Подъем (опускание) стрелы 3 осуществляется одновременным выдвижением (втягиванием) штоков гидроцилиндров 4 и 5,При этом кронштейн 9 поднят до контакта с утором 11. Для перевода стрелы 3 в другой сектор, например, меяяу кронштейнами 7и 9, при переходе границы секторов кронштейн 9 опускается, а кронштейн 8поднимается до упора 11, тем самым функции гидроцилиндрдв 5 и 6 взаимозаменяются и управление стрелой осуществляется аналогичным образом. Для перевода устройства в транспортное положение штоки цилиндров 4-6 втягиваются и кронштейны 7-9 поднимаются до упоров 11. Использование предлагаемого опорно-направляющего механизма позволяет увеличить зону обслуживания стреловых грузоподъемных устройств и снизить их металлоемкость, поскольку функции управления стрелой и предотвращения опрокидывания выполняют одни и те же гидроцилиндры., при этом устройство может использоваться как автономно, так и в составе транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-поворотная часть грузоподъемного стрелового устройства | 1987 |
|
SU1498699A1 |
| Механизм подъема стрелы манипулятора | 2015 |
|
RU2613203C1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
| МЕХАНИЗМ ДЛЯ ПОВОРОТА СТРЕЛЫ МАНИПУЛЯТОРА | 2011 |
|
RU2456227C1 |
| Механизм подъема стрелы манипулятора | 2018 |
|
RU2682866C1 |
| ПЛАВУЧИЙ ПОДЪЕМНЫЙ КРАН БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2003 |
|
RU2258026C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Транспортное средство для перевозки контейнеров | 1987 |
|
SU1502415A1 |
| Малогабаритный электропогрузчик со стреловым грузоподъемным устройством | 2021 |
|
RU2768058C1 |
| Транспортное средство с погрузочно-разгрузочным устройством | 1990 |
|
SU1787831A1 |
1. ОПОРНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ ДЛЯ СТРЕЛОВЫХ ГРУЗОПОДЪЕМНЫХ УСТРОЙСТВ, содержащий раму с жестко закрепленной на ней колонной, с которой шарнирно связана стрела, и силовые цилиндры, штоки которых шарнирио соединены со стрелой, о тличающийся тем, что, с целью расширения зоны обслуясивания грузоподъемным устройством и снижеИ 13 ,ния металлоемкости,он снабжен по I меньшей мере тремя кронштейнами, равномерно расположенными относительно вертикальной оси колонны один конец каждого из которых посредством горизонтального шарнира закреплен на раме, а другой шарнирно связан с корпусом одного из цилиндров. 2. Механизм по п.1, о т л ичающийся тем, что шарнирные соединения кронштейнов с корпусами цилиндров и стрелы с колонной выполнены сферическими, а корпус сферического шарнира колонны выполнен из трех частей с образованием между ними прорезей для размеще(Л .ния в них стрелы. о 4ik N)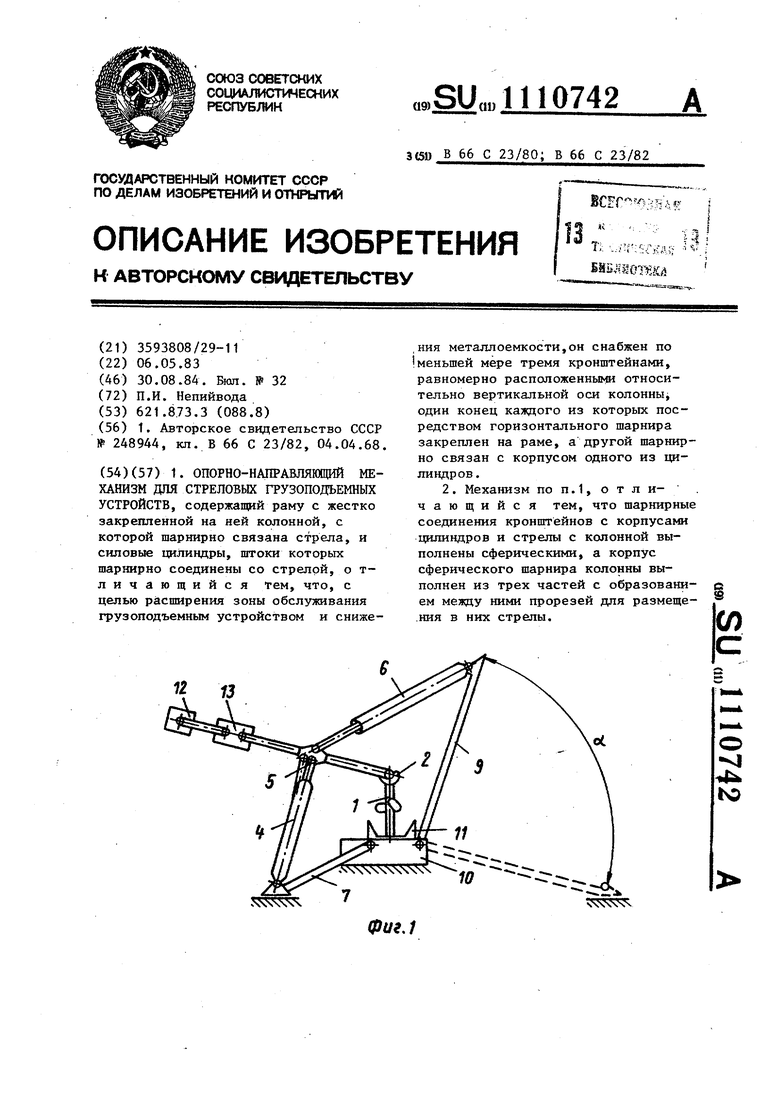
Фиг.З
фиг. if
и
фиг, 5
фиг. S
10
8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА И ИЗМЕНЕНИЯ ВЫЛЕТА СТРЕЛЫ КРАНА | 0 |
|
SU248944A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
