Изобретение относится к машиностроению, в частности к подъемно-транспортным машинам, и может быть использовано для поворотных устройств стреловых манипуляторов.
Известны механизмы поворота стрелы, преимущественно для тракторных погрузчиков, включающие смонтированный на поворотном основании стрелы кривошипный рычаг и установленный на неповоротной части погрузчика силовой гидравлический цилиндр (а.с. №130653 Механизм поворота стрелы. В.И.Рыжанков. БИ №15 за 1960 г.). С целью увеличения угла поворота механизм выполнен с поворотным относительно основания стрелы поводком, соединенным с головкой штока силового цилиндра установленного на неповоротной части, и несущий дополнительный силовой гидравлический цилиндр, головка штока которого шарнирно связана с кривошипным рычагом основания стрелы.
Причинам, препятствующим достижению требуемого технического результата является то, что представленная конструкция имеет существенные габариты и металлоемкость, а также сложную гидравлическую схему. Кроме того, при высоких скоростях поворота перемещаются значительные инерционные массы (поводок 3, гидроцилиндр 5), что приводит к увеличению динамических нагрузок.
Известен также механизм поворота стрелы выполненный, с целью упрощения конструкции, в виде рычагов, шарнирно соединенных одними концами с кронштейном, прикрепленным к поворотной колонне манипулятора, и несущих на свободном конце перемещающийся по направляющим при управлении силовым цилиндром ролик (а.с. №397389 Механизм поворота стрелового манипулятора. П.Ф.Визнер, Ю.М.Казачков, Г.И.Зудина, Л.И.Бауер, В.И.Банников. Г.А.Спирин и Я.И.Аданков. БИ №37 от 17.09.1973 г.).
Причина, препятствующая достижению требуемого технического результата при использовании такого механизма, состоит в том, что по мере выдвижения штока гидроцилиндра 2 система рычагов 5 и кронштейна 7 теряет жесткость при вращении поворотной колонны 8, в результате чего возникает неустойчивое положение, приводящее к раскачке стрелы, а в предельных углах поворота к переходу через «мертвое» положение механизма.
Известен также механизм поворота стрелы, содержащий смонтированный на платформе машины силовой цилиндр, кинематически связанный с поворотным основанием стрелы посредством рычага и поводка. С целью упрощения конструкции, механизм снабжен тягой, один конец, которой шарнирно закреплен на платформе машины, а продольная ось тяги, соединяющая между собой ее концевые шарниры, смещена относительно шарнира поворотного основания стрелы (а.с. №130653 Механизм поворота стрелы крана. Б.Ф.Негрубский и С.Е.Афанасьев. БИ №38 от 15.10.1986 г.).
Причиной, препятствующей достижению требуемого технического результата, являются сравнительно большие габариты, что допустимо для подъема стрелы в вертикальной плоскости и не приемлемо для механизма поворота стрелы по горизонту ввиду неудачной компоновки на несущем основании.
Более близким устройством к заявляемому является механизм подъемно-транспортного устройства с заданным относительным движением двух подвижных звеньев, кинематическая схема которого представлена на рис.4.6 в книге: Пейсах Э.Е., Нестеров В.А. Система проектирования плоских рычажных механизмов / Под. ред. К.В.Фролова. - М.: Машиностроение, 1988. - 232 с.; ил.
Причина, препятствующая достижению требуемого технического результата при использовании указанного механизма, заключается в его увеличенных габаритах и в представленном виде применение в качестве поворотного устройства стрелы по горизонту нерационально ввиду плохой компоновки на несущем основании манипулятора. Кроме того, при перемещении штока гидроцилиндра 2 (рис.4.6) меняется плечо действующей вдоль него силы относительно точки С, что приводит к переменным угловым скоростям исполнительного звена.
Задачей, на решение которой направлено заявляемое изобретение, является разработка оптимального по геометрическим параметрам механизма поворота стрелы манипулятора по горизонту.
Технический результат - рациональная компоновка механизма поворота стрелы по горизонту на раме и снижение динамических нагрузок за счет получения равных по величине угловых скоростей поворота стрелы в начальный и конечный момент движения штока стрелы.
Согласно изобретению указанный технический результат достигается тем, что гидроцилиндр, двуплечий рычаг и тяга закреплены взаимно-перекрестно, а двуплечий рычаг соединен с гидроцилиндром в зоне тупого угла между плечами, причем проушины крепления осей поворота гидроцилиндра и двуплечего рычага расположены в одной плоскости, а центры осей поворота расположены на одной прямой и равноудалены от оси поворота стрелы.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существующим признакам заявленного объекта.
Следовательно, заявленное предлагаемое изобретение соответствует требованию «новизна» по действующему законодательству.
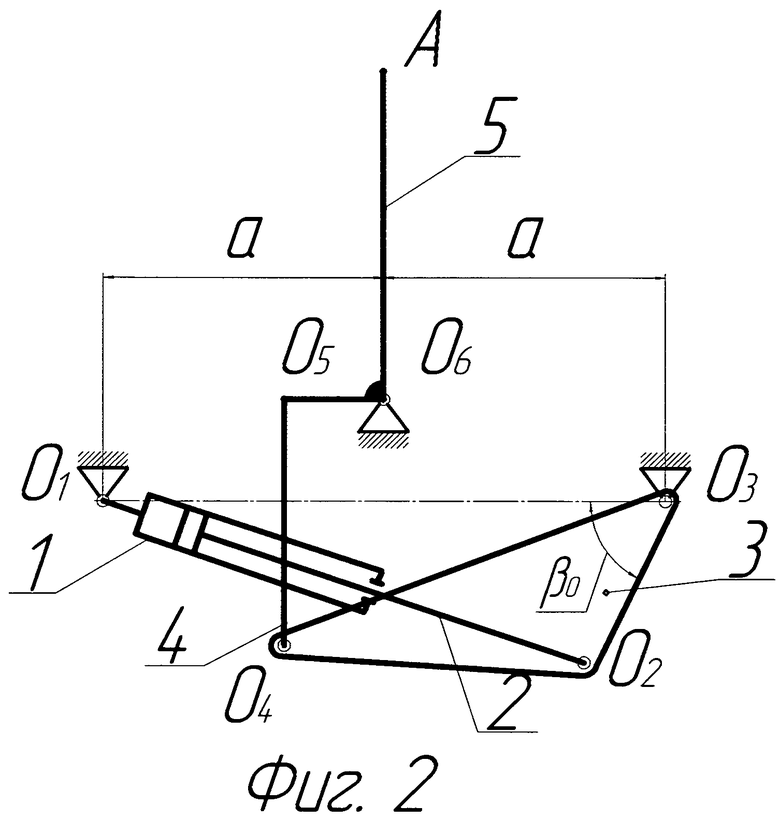
На фиг.1 изображен шестизвенный механизм поворота стрелы манипулятора; на фиг.2 изображена кинематическая схема механизма поворота.
Механизм поворота стрелы манипулятора по горизонту (фиг.1) состоит из силового гидроцилиндра 1, корпус которого шарнирно закреплен на основании манипулятора, а шток 2 гидроцилиндра шарнирно соединен с двуплечим рычагом 3, который также закреплен на основании манипулятора. Оси крепления корпуса гидроцилиндра 1 и двуплечего рычага 3 расположены на прямой О1О3 (фиг.2) и равноудалены от оси O6 поворота стрелы А.
Рычаг 3 в зоне тупого угла О2 (фиг.2) шарнирно соединен с тягой 4, которая соединена с поворотным в горизонтальной плоскости относительно оси O6 основанием 5 стрелы А (фиг.1). Таким образом, гидроцилиндр 1, двуплечий рычаг 3 и тяга 4 закреплены взаимно-перекрестно
Работа механизма поворота осуществляется следующим образом. При перемещении штока гидроцилиндра 2 (фиг.2) происходит поворот рычага 3 относительно оси О3, который приводит в движение рычаг 4, а он в свою очередь, взаимодействуя с рычагом 5, обеспечивает его поворот относительно оси O6, в результате чего происходит перемещение стрелы манипулятора и грузозахватного устройства (т.А).
Обеспечение равенства угловых скоростей грузонесущей стрелы в ее крайних положениях достигается путем соответствующих соотношений его размеров (фиг.2) - O1O2=l1; O2O3=R; ∠O1O2O3=β0.


где 


l0 - первоначальная длина гидроцилиндра;
lm - максимальная длина гидроцилиндра.
Таким образом, вышеизложенные сведения свидетельствует о выполнении при использовании заявленного изобретения следующей совокупности условий:
- средство предназначено для механизмов поворота грузонесущей шарнирно-сочлененной стрелы погрузочных манипуляторов;
- средство, воплощающее заявленный объект, способно обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию промышленная применимость по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Механизм подъема стрелы манипулятора | 2018 |
|
RU2682866C1 |
Изобретение относится к машиностроению, в частности к подъемно-транспортным машинам, и может быть использовано для поворотных устройств стреловых манипуляторов. Механизм поворота стрелы содержит гидроцилиндр, двуплечий рычаг и тягу, соединенную со стрелой. Силовой гидроцилиндр и рычаги взаимно пересекаясь образуют замкнутую систему, а двуплечий рычаг взаимодействует с гидроцилиндром в зоне тупого угла, что увеличивает угол поворота исполнительного звена. Оси вращения корпуса гидроцилиндра и двуплечего рычага расположены на одной прямой линии и равноудалены от оси поворота стрелы. Достигается рациональная компоновка механизма поворота стрелы по горизонту на раме и снижение динамических нагрузок за счет получения равных по величине угловых скоростей поворота стрелы в начальный и конечный момент движения штока стрелы. 2 ил.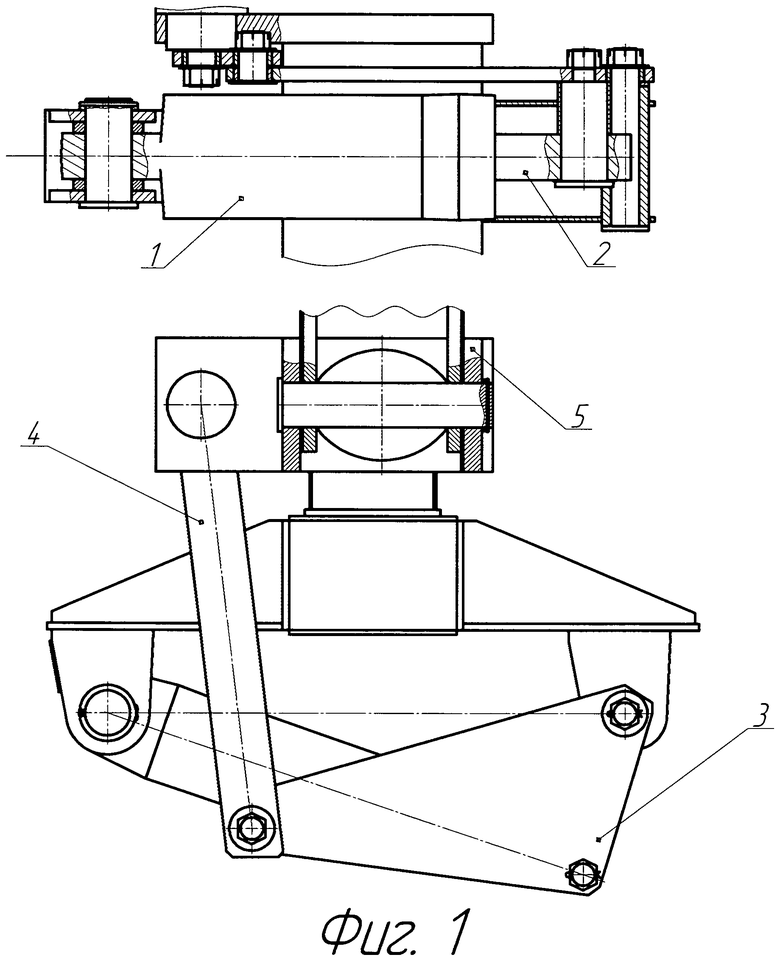
Механизм поворота стрелы манипулятора, содержащий закрепленный на основании с возможностью вращения гидроцилиндр и двуплечий рычаг со сторонами, образующий тупой угол с тягой, соединенной со стрелой, отличающийся тем, что гидроцилиндр, двуплечий рычаг и тяга закреплены взаимно-перекрестно, а двуплечий рычаг соединен с гидроцилиндром в зоне тупого угла между плечами, причем проушины крепления осей поворота гидроцилиндра и двуплечего рычага расположены на одной плоскости, а центры осей поворота расположены на одной прямой и равноудалены от оси поворота стрелы.
| ПЕЙСАХ Э.Е | |||
| и др | |||
| Система проектирования плоских рычажных механизмов | |||
| - М.: Машиностроение, 1998, с.186, рис.4.6 | |||
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| US 2008121603 A1, 29.05.2008 | |||
| FR 2871455 A1, 16.12.2005. | |||

