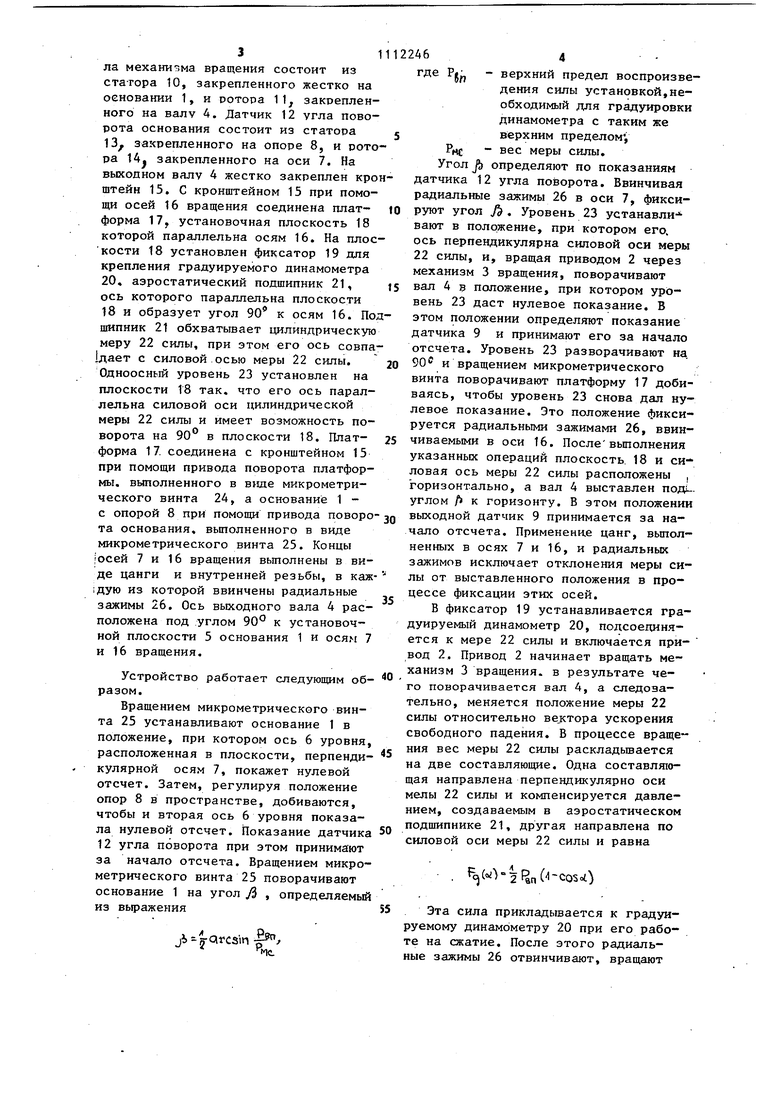
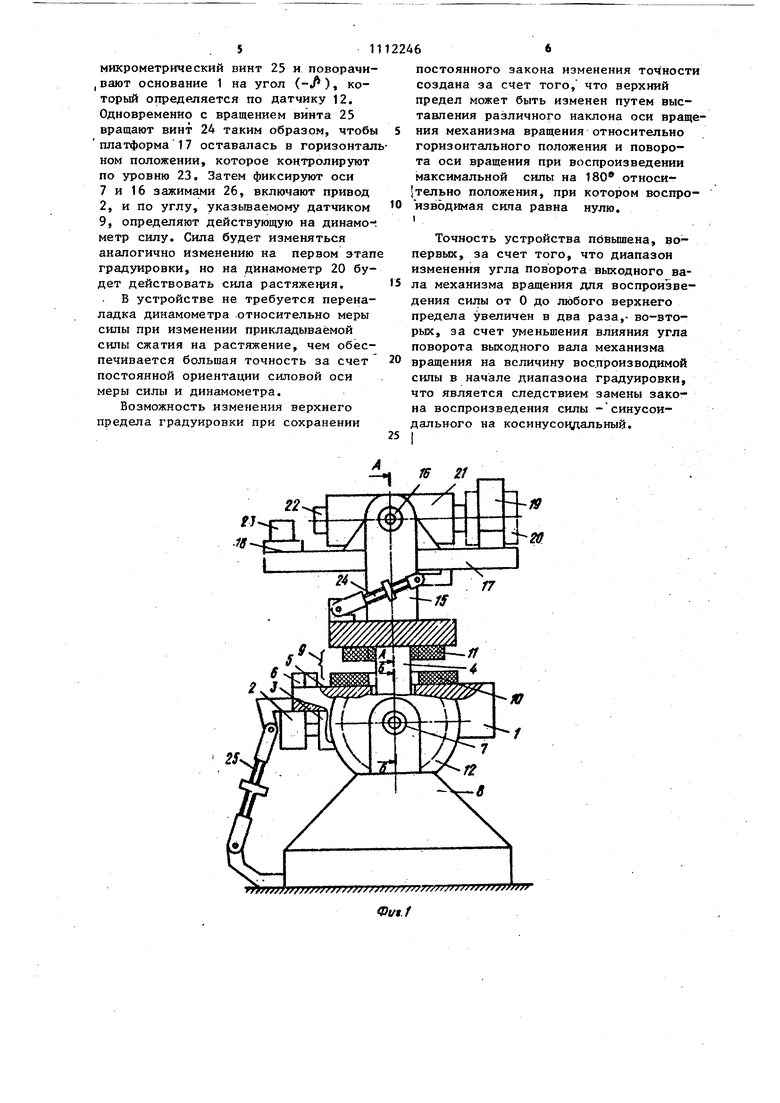
Изобретение относится к измерител ной технике и может быть применено для градуировки универсальных динамр метров на малые силы. Известно устройство, применяемое для град5гировки универсальных динамо 1метров, которое содержит основание, штангу, траверсы с установленными на них мерами.силы, устройство для реверсирования. Воспроизводимая уста новкой сила, прикладываема-я к динамо метру во время его градуировки, создается весом штанги и навешенными на нее мерами силы. Изменение направления действующей на динамометр силы осуществляется путем установки между динамометром и штангой реверсора- flj, Устройст.во не позволяет получить малую дискретность воспроизведения силы, точность его снижена, так как не удается точно совместить ось штан ги и силовую ось динамометра при изменении направления действия силы. Наиболее близким к изобретению по технической сущности является устрой ство, используемое для градуировки универсальных динамометров на малые силы, содержащее основание, на котором расположен механизм вращения, привод, двухосный уровень. Выходной вал механизма вращения расположен параллельно основанию. На выходном валу механизма вращения расположена платформа, на которой установлен подшипник. На подшипнике размещена мера силы, силовая ось которой параллельна установочной плоскости платформы и образует с выходным валом механизма вращения угол 90. На установочной поверхности платформы расположен также фиксатор для крепления градуируемого динамометра и одноосньй уровень с«осью, параллельной силовой оси меры силы. Устройство также снаб- жено датчиком угла поворота выходного вала механизма вращения |2j. Недостатками известного устройства являются невозможность изменения верхнего предела воспроизведения силы устройством в сторону мальк сил при сохранении постоянного закона изменения точности устройства в диапазо не от нуля до любого верхнего предела, а также недостаточная точность. Целью изобретения является обеспечение возможности изменения верхнего предела устройства в сторону мгшых сил и повьшение его точности. Эта цель достигается тем, что устройство для градуировки универсальных динамометров, содержащее основание с установленными на нем механизмом вращеният, приводом и двухосным уровнемf датчиком угла поворота выходного вала механизма вращения, платформой с расположенньвда на ней фиксатором для крепления градуируемого динамометра и аэростатическим подшипником, в котором размещена цилиндрическая мера силы с осью, параллельной установочной плоскости платформь, одноосный уровень, расположенный на установочной поверхности платформы параллельно силовой оси цилиндрической меры силы, снабжено вертикальными опорами, соединенными с основанием посредством осей вращения, датчиком угла поворота основания, кронштейном, соединенным с платформой посредством осей вращения, и жестко соединенным с выходным валом механизмом вращения, приводом поворота, основания и радиальными зажимами, вьшолненными в осях вращения, при этом одноосный уровень выполнен с возможность о поворота на 90 в плоскости платформы, аэростатический подшипник выполнен охватьгоающим цилиндрическую меру силы равномерно по периметру сечения оси : вращения, соединяющие крон- штейн с платформой, параллельны установочной плоскости платформы и расположены под углом к оси цилиндрической меры силы, а ось выходного вала механизма вращения расположена под углом 90 к основанию и осям вращения, соединяющим .основание с вертикальными опорами и кронштейн с платформой. На фиг. 1 представлена схема устройства/ на фиг. 2 - разрез А-А на фиг. U на фиг. 3 - разрез Б-Б на фиг. 1. Устройство содержит основание 1, на котором расположен привод 2 и механизм 3 вращения. Выходной вал 4 механизма 3 вращения расположен под углом к установочной плоскости 5 основания 1, на которой установлен двухосный уровень 6. Основание 1 при помощи осей 7 вращения соединено с вертикальными опорами 8. Одна ось уровня 6 расположена в плоскости,перпендикулярной осям 7, Вторая ось под углом 90 к первой оси уровня. Датчик 9 угла поворота выходного вала механиг.ма вращения состоит из статора 10, закрепленного жестко на основании 1, и ротора 11 закрепленного на валу Д. Датчик 12 угла поворота основания состоит из статора 13, закрепленного на опоре 8, и ротора 14. закрепленного на оси 7. На выходном валу 4 жестко закреплен кронштейн 15. С кронштейном 15 при помощи осей 16 вращения соединена платформа 17j установочная плоскость 18 которой параллельна осям 16. На плоскости 18 установлен фиксатор 19 для крепления градуируемого динамометра 20. аэростатический подшипник 21, ось которого параллельна плоскости 18 и образует угол 90 к осям 16. Подшипник 21 обхватывает цилиндрическую меру 22 силы, при этом его ось совпа1дает с силовой осью меры 22 силы. Одноосный уровень 23 установлен на плоскости 18 так. что его ось параллельна силовой оси цилиндрической меры 22 силы и имеет возможность поворота на в плоскости 18. Платформа 17. соединена с кронштейном 15 при помощи привода поворота платформы, выполненного в В1ще микрометрического винта 24, а основание 1 с опорой 8 при помощи привода поворота основания, выполненного в виде микрометрического винта 25. Концы |осей 7 и 16 вращения вьшолнены в виде цанги и внутренней резьбы, в каж:дую из которой ввинчены радиальные зажимы 26. Ось выходного вала 4 расположена под углом 90° к установочной плоскости 5 основания 1 и осям 7 и 16 вращения.
Устройство работает следующим образом.
Вращением микрометрического винта 25 устанавливают основание 1 в положение, при котором ось 6 уровня, расположенная в плоскости, перпендикулярной осям 7, покажет нулевой отсчет. Затем, регулируя положение опор 8 в пространстве, добиваются, чтобы и вторая ось 6 уровня показала нулевой отсчет. Показание датчика 12 угла поворота при этом принимают за начало отсчета. Вращением микрометрического винта 25 поворачивают основание 1 на угол уЗ , определяемый из выражения
,
ji j-qrcainVKL
где Pj - верхний предел воспроизведения силы установкой,необходимый для градуировки динамометра с таким же верхним пределом, PMJ - вес меры силы. Угол р определяют по показаниям датчика 12 угла поворота. Ввинчивая радиальные зажимы 26 в оси 7, фиксируют угол . Уровень 23 устанавли- вают в положение, при котором его ось перпендикулярна силовой оси меры 22 силы, и, вращая приводом 2 через механизм 3 вращения, поворачивают вал 4 в положение, при котором уровень 23 даст нулевое показание. В этом положении определяют показание датчика 9 и принимают его за начало отсчета. Уровень 23 разворачивают на. 90 и вращением микрометрического винта поворачиэают платформу 17 добиваясь, чтобы уровень 23 снова дал нулевое показание. Это положение фиксируется радиальными зажимами 26, ввинчиваемыми в оси 16. Послевыполнения указанных операций плоскость. 18 и силовая ось меры 22 силы расположены , горизонтально, а вал 4 выставлен поди углом Л к горизонту. В этом положении выходной датчик 9 принимается за начало отсчета. Применение цанг, выполненных в осях 7 и 16, и радиальных зажимов исключает отклонения меры силы от выставленного положения в процессе фиксации этих осей.
В фиксатор 19 устанавливается градуируемый динамометр 20, подсоединяется к мере 22 силы и включается привод 2, Привод 2 начинает вращать механизм 3 вращения, в результате чего поворачивается вал 4, а следовательно, меняется положение меры 22 силы относительно ве.ктора ускорения свободного падения. В процессе вращения вес меры 22 силы раскладьшается на две составляющие. Одна составляющая направлена перпендикулярно оси мелы 22 силы и компенсируется давлением, создаваемым в аэростатическом подщипнике 21, другая направлена по силовой оси меры 22 силы и равна
4 °|fin -COSoi)
Эта сила прикладывается к градуируемому динамометру 20 при его работе на сжатие. После этого радиальные зажимы 26 отвинчивают, вращают 5 микрометрический винт 25 и поворачи ,вают основание 1 на угол (-/), который определяется по датчику 12. Одновременно с вращением винта 25 вращают винт 24 таким образом, чтобы платформа 17 оставалась в горизонтал ном положении, которое контролируют по уровню 23. Затем фиксируют оси 7 и 16 зажимами 26, включают привод 2, и по углу, указьшаемому датчиком 9, определяют действующую на динамометр силу. Сила будет изменяться аналогично изменению на первом этап градуировки, но на динамометр 20 будет действовать сила растяжения. В устройстве не требуется переналадка динамометра относительно меры силы при изменении прикладываемой силы сжатия на растяжение, чем обеспечивается большая точность за счет постоянной ориентации силовой оси меры силы и динамометра. Возможность изменения верхнего предела градуировки при сохранении 46 постоянного закона изменения точности создана за счет того, что верхний предел может быть изменен путем выставления различного наклона оси вращения механизма вращения относительно горизонтального положения и поворота оси вращения при воспроизведении максимальной силы на 180 относительно положения, при котором воспроизводимая сила равна нулю. Точность устройства пбвышена, вопервых, за счет того, что диапазон изменения угла поворота выходного вала механизма вращения для воспроизведения силы от О до любого верхнего предела увеличен в два раза,- во-вторых, за счет уменьшения влияния угла поворота выходного вала механизма вращения на величину воспроизводимой силы в начале диапазона градуировки, что является следствием замены закона воспроизведения силы - синусоидального на косинусо1у;альный.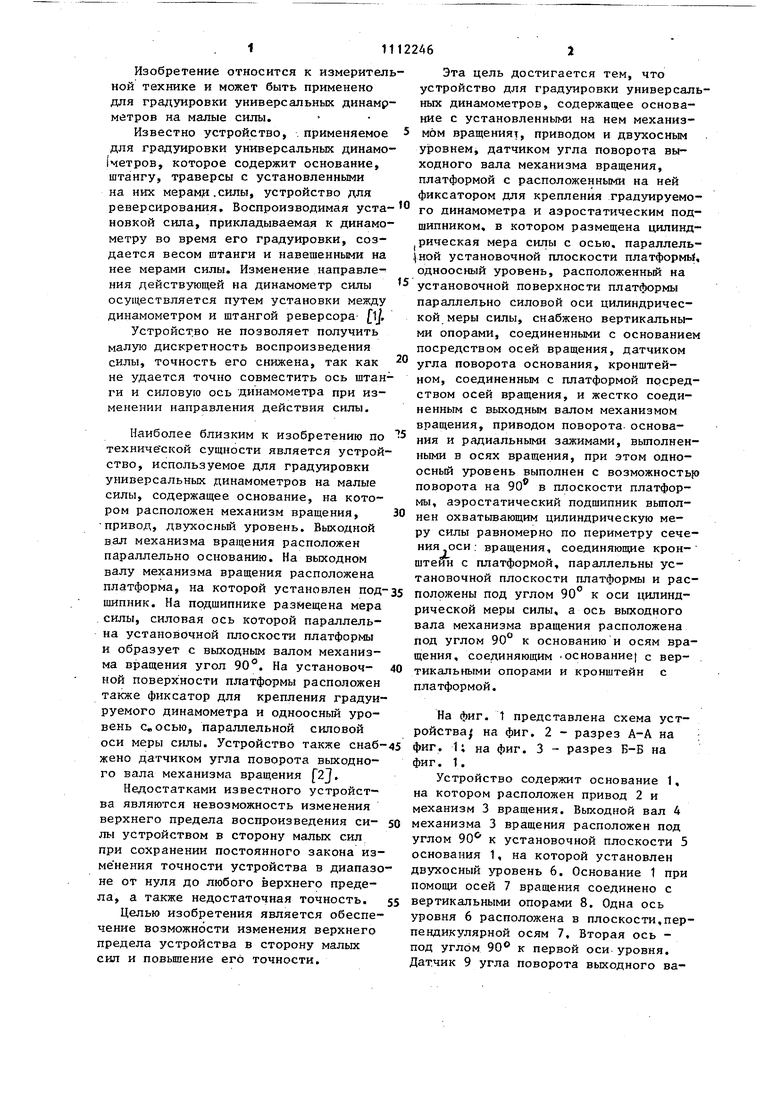
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для градуировки динамометров | 1982 |
|
SU1027552A1 |
| Устройство для градуировки динамометров | 1983 |
|
SU1149131A1 |
| Устройство для динамической градуировки динамометров малых сил | 1985 |
|
SU1267188A1 |
| Устройство для градуировки силовоспроизводящей машины с наклонной плоскостью | 1984 |
|
SU1312420A1 |
| ГРАДУИРОВОЧНАЯ ЦЕНТРИФУГА | 1987 |
|
SU1840766A1 |
| Устройство для градуировки динамометров | 1981 |
|
SU970155A1 |
| Силовая рама шестикомпонентного градуировочного стенда | 1982 |
|
SU1059460A1 |
| Способ градуировки динамометров | 1987 |
|
SU1432360A1 |
| Стенд для градуировки аэродинамических весов | 1980 |
|
SU964511A2 |
| Установка для градуировкиАКСЕлЕРОМЕТРОВ | 1979 |
|
SU853557A1 |
УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ УНИВЕРСАЛЬНЫХ ДИНАМОМЕТРОВ, содержащее основание с установленными на нем механизмом вращения, приводом и двухосным уровнем, датчиком угла поворота выходного вала механизма вращения, платформой с расположенными на ней фиксатором для крепления градуируемого динамометра и аэростатическим подшипником, в котором размещена цилиндрическая мера силы с осью, параллельной установочной плоскости платформы, одноосный уровень, расположенный на установочной поверхности платформы параллельно оси цилиндрической меры силы, отличающееся тем, что, с целью расширения пределов задаваемых сил и функциональных возможностей устройства, оно снабжено вертикальными опорами, соединенными ,с основанием посредством осей вращения, датчиком угла поворота основания, кронштейном, соединенным с платформой посредством осей вращения,|и жестко соеди- ненным с выходньм валом механизмом вращения, приводом поворота основания и радиальными зажимами, выполненными в осях вращения, при этом одноосный уровень выполнен с возможностью поворота на 90 в плоскости платформы, аэростатический подшипник охватыg вает цилиндрическую меру сипы равномерно по периметру сечения, оси (Л вращения, соединяющие кронштейн с платформой, параллельны установочной плоскости платформы и расположены под углом 90 к оси цилиндрической § меры силы, а ось выходного вала механизма вращения расположена под углом. 90 к основанию и осям вращения, соединяющим основание с вертикальными э опорами и кронштейн с платформой. tsO 4 а
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU236085A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Текстильная промышленность, 1970, № 8, с | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
