Изобретение относится к измерительной технике и может быть применено для градуировки динамометров на малые силы.
Известно устройство, предназначенное для градуировки динамометров, содержащее штангу, магазин мер силы, траверсу с механизмом BepTHKanbHOго перемещения и шаговый двигатель Щ
Однако в этом устройстве из-за скачкообразного перемещения траверсы при навешивании меры силы на штангу на динамометре возникают колебания., снижаюцще точность градуировки,.
Наиболее близким по технической сущности к изобретению является устройство для градуировки динамометров на малые силы, содержащее основание, бес тупенчатый привод, механизм вращения, выходной вал которого сориентирован под углом к ускорению свободного падения и на котором устаноБлена платформа, а входной вал соединен с бесступенчатым приводом, подвес, в котором размещена мера силы, датчик поворота выходного вала механизма и блок управления бесступенчатым приводом 2J ,
Однако известное устройство обладает недостаточной точностью изза погрешности отработки угла поворота меры силы относительно вектора ускорения свободного падения, а также из-за большой амплитуды колеба НИИ, возникающих на динамометре в результате резкого торможения механизма вращения,.
Целью изобретения является повышение точности за счет более точной отработки угла поворота меры силы в пространстве и уменьшения амплитуды колебания .динамометра.
Поставленная цель достигается тем, что в устройство для градуировки динамометров, содержащем основание, бесступенчатый привод, соединенньй с блоком управления бесступенчатым приводом, датчик угла поворота, соединенный с блоком измерения угла поворота, механизм вращения, входной вал которого соединен с бесступенчатым приводом, а на выходной вал установлена платформа с фиксатором для укрепления градуируемого динамометра и аэростатическим подве, сом для крепления в нем меры силы, введены щаговый двигатель, блок уп
равления шаговьм двигателем, электромагнитная муфта, блок включения электромагнитной муфты, датчик фиксации шага, блок фиксации шага,
блок измерения скорости с таймером, блок определения изменения скорости, блок поддержания скорости, блок
анализа амплитуды и программное устройство, причем блок фиксации шага соединен с датчиком фиксации шага, блоком определения изменения скорости, блоком управления шаговым двигателем и блоком поддержания скорости, блок измерения скорости соединен с таймером, блоком измерения угла поворота, программным устройством, блоком определения изменения скорости и блоком поддержания скорости, блок определения изменения скорости соединен с блоком поддержания скорости, блок включения электромагнитной муфты соединен
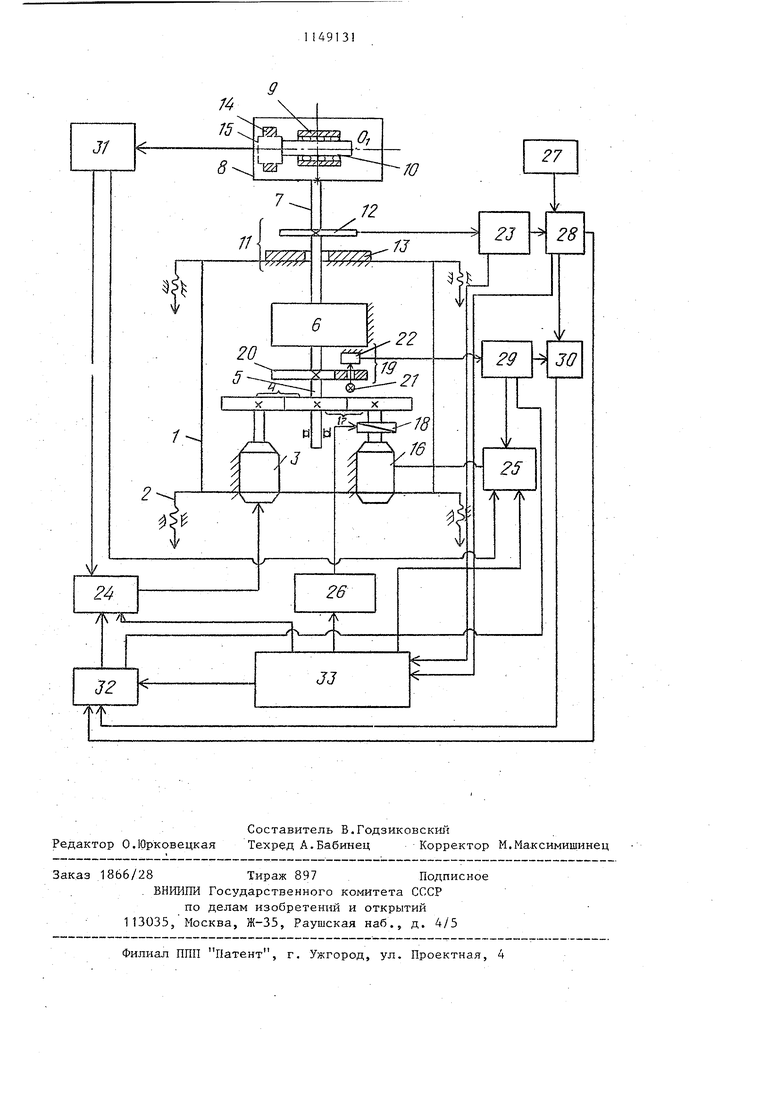
с электромагнитной муфтой и программным устройством, которое соединено с блоком измерения угла поворота, блоком поддержания скорости, блок.ом управления бесступенчатьп 1 приводом и блоком Управления.шаговым двигателем, блок анализа амплитуды соединен с выходом градуируемого динамометра, блоком управления шаговым двигателем и блоком управления бесступенчатым приводом, который соедине.н с блоком поддержания скорости. На чертеже представлено устройство для градуировки динамометров на .малые силы.
Уст| ойство содержит основание 1 с регулируемыми опорами 2, на котором расположен бесступенчатьй привод 3, соединенный через шестеренчатую пару 4 с входным валом 5 механизма 6 вращения. На вькодном валу 7 механизма 6 вращения закрепена п{1атформа 8 с аэростатическим одвесом 9, в котором размещена ера 10 силы. Датчик 11 угла повоота состоит из ротора 12 и статора 13, закрепленных соответственна На валу 7 и основании 1, На платфоре 8 установлен фиксатор 14 для крепления динамометра 15. На основании 1 установлен шаговый двигатель 16, соединенный шестеренчатой парой 17с валом 5, На валу двигателя 16 установлена электромагнитная муфта 18. На валу 5 установлен датчик 19 фиксации шага, состоящий из кодового диска 20, подсветки 21 и фотоприемника 22. В диске 20 по диаметру выполнены отверстия с шагом, равным шагу шагового двигателя 16, умноженному на передаточное отношение в шестеренчатой паре 17. Устройство также содержит блок 23 измерения угла поворота, блок 24 управления бесступенчатым приводом, блок 25управления шаговым двига.телем, блок 26 включения муфты, таймер 27 :блок 28 измерения скорости, блок 29 отработки шага, блок 30 определения изменения скорости, блок 31 анализа амплитуды, блок 32 поддержания CKopo ти и программное устройство 33. Последнее соединено с блоками 32, 24 25, 23 и 28 поддержания скорости, управления бесступенчатым приводом, управления шаговым двигателем, измерения угла поворота и измерения ско рости .соответственно и через блок 26включения муфты с муфтой 18. Блок 31 анализа амплитуды соединен с блоками 24 и 25 управления бесступенчатым приводом и управления шаговым двигателем и динамометром 15, блок 29 отработки шага - с блоками 25, 32 и 30 управления шаговым двигателем, поддержания скорости и определения изменения скорости соответственно и датчиком фиксации 19 шага, бесступенчатый привод 3-е блоком 24 управления бесстзтенчатын приводом, а шаговый двигатель 16 - с блоком 25 его управления. Датчик 11 угла соединен с блоком 23 измерения угла Блок 32 поддержания скорости также соединен с блоками 24, 28 и 30 управления бесступенчатым приводом, изменения скорости и определения изменения скорости соответственно. Блок измерения скорости соединен с блоками 30 и 23 определения изменени скорости и измерения угла поворота и таймером 27. Устройство работает следующим образом. Регулируемыми опорами 2 основани 1 устанавливается в горизонтальное положение. Платформа 8 устанавливае ся параллельно основанию 1, При этом мера 10 силы занимает горизонтальное положение. В программное устрой ство 33 вводится зависимость силы от угла поворота вала 7 - значения силы при которых необходимо отгра™ дуировать динамометр и максимально допустимое значение амплитуды колебания динамометра 15. После подачи команды на воспроизведения .силы программное устройство 33 определяет значение угла, соответствующего этой силе, и подает команду блоку 24 управления бесступенчатым приводом, который запускает его. Вращение от привода 3 через шестеренчатую пару 4 и механизм 6 вращения передается платформе 8, вместе с которой поворачивается и мера 10 силы. При этом на динамометр 15 начинает действовать составляющая сила веса меры 10 силы, направленная по ее силовой оси 0-0 { . На динамометре 15 возникает колебательный процесс. Выходной сигнал динамометра 15 передается на блок 31 анализа амплитуды, в котором определяется амплитуда колебательного процесса. Значение амплитуды непрерывно передается в блок 24 управления бесступенчатым приводом. Одновременно туда же передается из программного устройства 33 максимально допустимое значение амплитуды. Оба значения сравниваются, и при их равенстве блок 24 управления бесступенчатым приводом перестает увеличивать скорость привода 3 и в дальнейшем поддерживает ее постоянной. Угол поворота валя 7 постоянно измеряется датчиком 11 угла прворо та и через блок 23 измерения угла поворота передается в программное устройство 33, в котором измеренное значение угла сравнивается с требуе-. мым углом. Одновременно из этого же блока значение угла подается в блок 28 измерения скорости, куда также поступают сигналы от таймера 27. В блоке 28 измерения скорости определяется скорость изменения угла поворота вала 7 и из него передается в программное устройство 33. В последнем определяется кинетическая энергия устройства, угол, при котором начинается замедление, и тормозной момент сопротивления шагового двигателя 16, развиваемый на одном-шаге. Для того, чтобы вал 7 точно остановился при требуемом угле, необходимо, чтобы ки.нетическая энергия одинаково убывала на каждом шаге торможения, что равносильно равномерному убыванию квадрата ско- рости угла поворота вала 7 к концу отработки шага. Так как в процессе вращения к вращающимся частям устройства, кроме момента сопротивления шагового двигателя 16, приклады вается большое количество случайных моментов сопротивления, то для обеспечения равномерного убывания квадрата скорости угла поворота вала 7 необходимо после каждого шага, во вдемя отработки которого создается момент сопротивления, выполнить еще один шаг, во время отработ ки которого корректируется изменение квадрата скорости за счет случайных моментов сопротивления Посла того, как блок 23 измерения угла поворота вьщает в програмное устройство 33 сигнал, соответствующий углу замедления, програминым ус- ройством 33 подается команда блоку 26 включения муфты на включение муфты 18, блоку 24 управления бесступенчатым приводом на , отключение привода 3 и блоку 25 управления шаговым двигателем на начало работы в пошаговом режиме. Команды реализуются. Кроме этого, про раммное устройство 33 запускает бл 32 поддержания скорости и вьщает ему расчетное значение, пропорциональное квадрату угла замедления. Вращаясь на валу 5, кодовый диск 20 поворачивается, при этом ближайщее к подсветке 21 отверстие засвечивае ся, с датчика 19 поступает сигнал на блок 29 отработки шага, которьй дает сигнал.в начале шага блоку 25 управления шаговым двигателем, бло ку 30 определения изменения скорости 40 и блоку 32 поддержания скорости. Блок 25 управления шаговым двигателем подает команду на шаговый двигатель 16, на котором фиксируется на.чало шагового режима и в пределах первого шага создается момент сопротивления. Блок 32 поддержания скорости принимает полученный сигнал за начало отсчета шагов. Блок 30 определения изменения скорости при получении сигнала от блока 29 отработки шага фиксирует значение скорос ти, полученное от блока 28 измерения скорости. Созданный шаговым двигателем 16 момент сопротивления гасит 31 .6 кинетическую энергию вращающихся частей на определенную величину. .При засветке второго отверстия в кодовом диске 20 блок29 отработки шага выдает второй импульс. При этом шаговый двигатель 16 начинает отрабатывать второй шаг, а блок 25 управления шаговым Двигателем, получив сигнал от блока 29 отработки шага, снимает момент сопротивления. Блок 30 определения изменения скорости при получении второго сигнала от блока 29 отработка шага фиксирует значение скорости, полученное от блока 28 измерения скорости, определяет разность угловых скоростей,определенных при первом и втором сигналах, подсчитывает значение квадрата этой разности и передает в блок 32 поддержания скорости, в котором эта величина сравнивается величиной, пропорциональной квадрату угла замедления, после чего, имея команду от блока 29 отработки шага о начале отработки второго шага, блок 32 поддержания скорости дает команду блоку 24 управления бесступенчатым приводом на запуск бесступенчатого привода 3 в направлении вращения вала 7. При этом вращении создается добавочный момент и скорость вала 7 увеличивается. Во время работы бесступенчатого привода 3 изменяющееся значение скорости продолжает поступать в блок 32 под- держания скорости, который, предва-.рительно определив необходимую скоость в конце второго тага, выдает блоку 24 управления бесступенчатым риводом команды на увеличение ск-оРо ти до тех пор, пока от блока 28 измерения скорости в период отработки шага, следующего за шагом, создающим момент сопротивления, не поступает значение скорости, соответствующей расчетной. В дальнейшем на каждом нечетном шаге шаговый двигатель 16 создает момент сопротивления, а на каждом четном бесступенчатьй привод 3 корректирует скорость. Использование изобретения для градуировки динамометров на малые силы позволит повысить точность в 2-2,5 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ программного управления приводом | 1986 |
|
SU1403330A1 |
| Способ градуировки измерителя крутящего момента | 1987 |
|
SU1566237A1 |
| Следящая система | 1979 |
|
SU842705A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| Устройство для градуировки универсальных динамометров | 1983 |
|
SU1112246A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ И БОЛЕВОГО ПОРОГА СЖАТИЯ БОКОВОЙ ПОВЕРХНОСТИ СТОПЫ | 2014 |
|
RU2584115C2 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ПРОБ АЭРОЗОЛЕЙ ИЗ ФАКЕЛА И СТРУИ ПРИ СЖИГАНИИ ТОПЛИВ И ПИРОСОСТАВОВ | 1993 |
|
RU2047855C1 |
| ПОРТАТИВНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ИСКУССТВЕННЫМ ПОКРЫТИЕМ | 2009 |
|
RU2388865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ШАРНИРНОГО МОМЕНТА РУЛЕВЫХ ОРГАНОВ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ИСПЫТАНИИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243526C1 |
УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ ДИНАМОМЕТРОВ, содержащее основание, бесступенчатьй привод, соединенный с блоком-управления бесступенчатым приводом, датчик угла поворота, соединенный с блоком измерения угла поворота, механизм вращения, входной вал которого соединен с бесступенчатым приводом, а на выходной вал ус-. тановлена платформа с фиксатором для крепления градуируемого динамометра и аэростатическим подвесом для крепления в нем меры силы, отличающееся тем, что, с целью повьшения точности, в него введены шаговый двигатель, блок управления шаговым двигателем, электромагнитная муфта, блок включения электромагнитной муфты, датчик фиксации шага, блок фиксации шага. блок измерения скорости с таймером, . блок определения изменения скорости, i блок поддержания скорости, блок анализа амплитуды и программное устройство, причем блок фиксации шага соединен с датчиком фиксации шага, блоком определения изменения скорости, блоком управления шаговым двигателем и блоком поддержания скорости, блок измерения скорости соединен с таймером, блоком измерения угла поворота, программным устройством, блоком.определения изменения скорости и блоком поддержания скорости, блок определения изменения скорости соединен с блоком поддержания скорости, блок включеш ния электромагнитной муфты соединен с электромагнитной муфтой и программным устройством, которое соединено с блоком измерения угла поворота и блоком поддержания скорости, блоком управления бесступенчатым приводом и блоком управления шаговым двигателем, блок анализа амплитуды соединен с выходом градуируемого ди4 намомента, блоком управления шаго вым двигателем и блоком управления бесступенчатым приводом, который САЭ соединен с блоком поддержания ско.дрости.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для увеличения сцепной силы тяги паровозов и других повозок | 1919 |
|
SU355A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Текстильная промьшшенность, 1979, № 4, с | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
