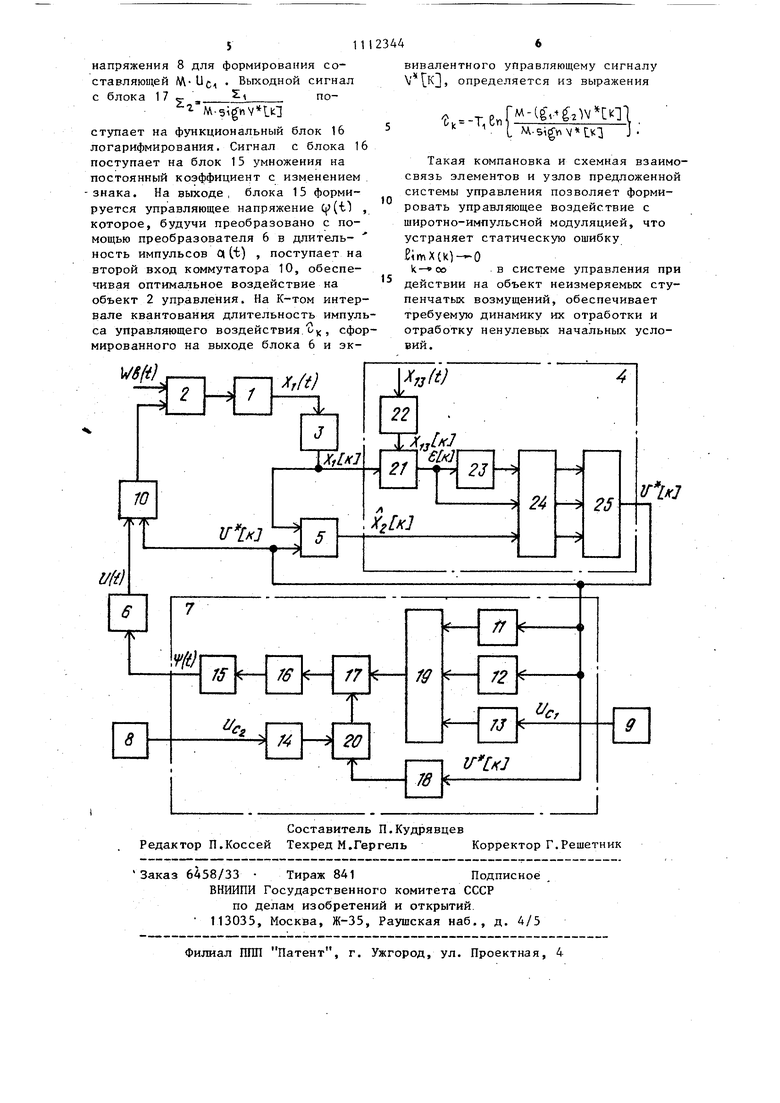
Изобретение относится к области оптимального дискретного управления технологическими объектами и может быть применено, в частности, для уп равления процессами оптимальной ста билиэации температурных режимов теп ловых обхектов (процессы термообработки, сушки, установки климатических испытаний, установки темпериро вания и т.д.). Наиболее близким к предлагаемой системе является система управления с обратной связью по выходной переменной, содержащей объект, датчик измеряемого параметра, оптимальный регулятор и устройство идентификаци (наблюдатель), с помощью которого формируется ненаблюдаемая координата 1 . Однако известная система обеспечивает оптимальное управление тольк лишь технологическими объектами, со держащими дорогие и сложные по конструкции исполнительные механизмы. Этот недостаток обусловлен свойством данной системы осуществлять оптимал ное управление только с амплитудноимпульсной модуляцией (АИМ). На практике часто приходится управлять такими технологическими объектами, для которых в виду их специфических особенностей оптимальное управление с амплитудно-импульсной модуляцией не представляется возможным или является нецелесообразным, и требуется управление осуществлять с использованием широтноимпульсной модуляции (ШИМ). Целью изобретения является расширение области применения путем форми рования оптимального управления с использованием широтно-импульсной мо дуляции . Указанная цель достигается тем. что в систему управления, содержащу .датчик Измеряемого параметра, подкл ченный входом к выходу объекта управления, дискретизатор, соединен ный входом с выходом датчика измеряемого параметра, а выходом - с входом регулятора с амплитудно-импульсной модуляцией и первым входом идентификатора, второй вход которого соединен с выходом регулятора с амплитудно-импульсной модуляцией, введены два функциональных преобразователя, два источника постоянного тока и Коммутатор, первый вход кото) рого соединен с выходом регулятора с амплитудно-импульсной модуляцией, а второй вход - с выходом первого функционального преобразователя, выходы первого и второго источников постоянного напряжения соединены соответственно с первым и вторьм входами второго функционального преобразователя, подключенного выходом к входу первого функционального преобразователя, а третьим входом к выходу регулятора с амплитудно-им пульсной модуляцией, выход коммутатора соединен с входом объекта управления. Кроме того, второй функциональный преобразователь содержит пять блоков умножения, логарифмирующий блок, блок деления, блок вьщеления знака сигналов, сумматор и формирователь сигналов, причем первого, второго и третьего -блоков умножения соединены с соответствующими входами сумматора, выход которого подключен к первому входу блока деления, второй вход которого соединен с выходом формирователя сигналов, первый вход которого соединен с выходом блока вьделения знака сигналов, а второй вход - с выходом четвертого блока умножения, выход блока деления через логарифмирующий блок соединен с входом пятого блока умножения, выход которого является выходом второго функционального преобразователя, первый и второй входы которого являются соответственно входами четвертого и третьего блоков умножения, входы первого и второго блоков умножения соединены с входом блока вьделения знака сигналов и с третьим входом второго функционального преобразователя. На чертеже представлена блок-схема системы управления. Система содержит датчик 1 измеря-емого параметра, объект 2 управления, дискретизатор 3, регулятор 4 с амплитудно-импульсной модуляцией, идентификатор 5, первый функциональный преобразователь 6, второй функциональный преобразователь 7, первый и второй источники 8 и 9 постоянного напряжения, коммутатор 10. Второй функциональный преобразователь 7 содержит первый 11, второй 12, третий 13, четвертый 14 и пятый 15 блоки умножения, логарифмирующий 3 блок 16, блок 17 деления, блок 18 выделения знака сигналов, сумматор 19 и формирователь 20 сигнала. Регулятор 4 с амплитудно-импульс ной модуляцией содержит схему 21 сравнения, второй дискретизатор 22, интегратор 23, шестой блок 24 умножения и второй сумматор 25. Работа системы управления эаклю чается в следующем. На объект 2 управления воздействует неизмеряемое ступенчатое возмущение Wg(t). Непрерывный сигнал X(t) с датчика 1 измеряемого параметра поступает на вход дискретизатора 3, где преобразуется в импульсный сигнал X.lTj соответствующей амплитуды и постоянной длительности. С выхода дискретизатора 3 импульсный сигнал одновременно поступает на первый вход регулятора 4, являющийся первы входом схемы 21 сравнения. На схеме 21 сравнения сигнал с дискретизатор 3 сравнивается с установкой , поступающей с выхода дискре тизатора 22, и в виде разности Х К (сигнал ошибки) пост пает на вход дискретного интегратор 23 и на вход блока 24 умножения. Идентификатор| 5 состояния формиру недостающую, недоступную для непосредственного измерения второю координату объекта управления основании информации, получаемой в дискретные моменты времени с датчик 1 , и величине управляющего си нала Y IKJ, получаемого с выхода сумматора 25. Выход идентификатора 5 состояния соединен с сумматором 25 через блок 24 умножения на посто янные коэффициенты. Выходная величи на блока 25 является оптимальной в смысле минимума обобщенного квадратичного критерия качества,W-K2XiUl-4|u K, где К.,К,,К- - коэффициент оптимал ной обратной связи; li Kj- выход дискретного интегратора 23. Сигнал с выхода сумматора 25 одновременно поступает на первый вход коммутатора 10 и на первый вход функционального преобразователя 7. 44 В том случяе, когда необходимо осуществлять оптимальное управлемш технологическим объектом, исполнительные механизмы которого требуют для своего управления воздействия сигналом, сформированным по амплитудно-импульсной модуляция, коммутатор 10 осуществляет передачу на объект 2 (например, с помощью ручного управления) управляющего воздействия V кЗ, сформированного блоком 4. В другом случае, когда в объекте управления имеются исполнительные механизмы, требующие для своего-управления сигналов, сформированных с помощью широтно-импульсной модуляции, коммутатор 10 осуществляет передачи на объект управляющих сигналов, сформированных преобразователем 7 и преобразованных блоком 6. При этом сигнал V К, как это было отмечено, поступает на первый вход функционального преобразователя 7, который обеспечивает, формирование управляющего сигнала ( (t) с помощью щиротно-импульсной модуляции, который эквивалентен управляющему сигналу V , сформированному амплитудно-импульсной модуляцией. Сигнал У кТ с блока 2 поступает одновременно на первый 11 и второй 12 блоки умножения на постоянные коэффициенты с изменением знака и блок выделения знака сигналов 18. На третий блок умножения на постоянную величину 13 подается сигнал постоянной амплитуды Uc, с выхода второго источника 9. На выходе блока 13 формируется сигнал , . На выходе блока 11 формируется сигнал -,, а на выходе блока 12 сигнал - jV К. Эти сигналы посту пают на соответствующие входы сумматора 19. Выходной сигнал сумматора 1 2:,-4-g,. поступает на вход блока 17 деления, . второй вход которого является выходом формирователя 20 сигналов, формирующего сигнал /Л-6i6n / t.K по выходным сигналам с блоков 14 ;И 18, причем через блок вьщеления знака сигналов проходит сигнал V к с выхода регулятора 4, а через блок умножения на постоянные коэффициенты 14 проходит сигнал постоянной амплитуды с первого источника постоянного

| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ СИНТЕЗАТОР ИЗМЕНЯЮЩЕЙСЯ ЧАСТОТЫ | 2023 |
|
RU2809550C1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Преобразователь дельта-модулированного сигнала в импульсно-кодово-модулированный сигнал | 1986 |
|
SU1347190A1 |
| Электронно-копировальный прибор | 1980 |
|
SU898376A1 |
| Устройство для моделирования одноканальной системы передачи информации с импульсно-кодовой модуляцией | 1988 |
|
SU1578719A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 2008 |
|
RU2369963C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2009 |
|
RU2417390C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
1. СИСТЕМА УПРАВЛЕНИЯ, содержащая датчик измеряемого параметра, подключенный входом к выходу объекта управления, дискретизатор, соединенный входом с выходом датчика измеряемого параметра, п выходом с входом регулятора с амплитудно-импульсной модуляцией и первым входом идентификатора, второй вход которого соединен с выходом регулятора с амплитудно-импульсной модуляцией, отличающаяся тем, что, с целью расширения области ее применения путем формирования оптимального управления с использованием широтно-импульсной модуляции, в нее введены два функциональных преобразователя, два источника постоянного напряжения и коммутатор, первый вход которого соединен с выходом регулятора с амплитудно- , импульсной модуляцией, а второй вход - с выходом первого функционального преобразователя, выходы первого и второго источников постоянного напряжения соединены соответственно с первым и вторым входами второго функционального преобразователя, подключенного выходом к входу первого функционального преобразователя, а третьим входом - к выходу регулятора с амплитудно-импульсной модуляцией, выход коммутатора соединен с входом объекта управления. 2. Система управления по п. 1, отличающаяся тем, что рторой функциональный преобразователь содержит пять блоков умножсния, логарифмирующий блок, блок деления, блок вьщеления знака сигналов, сумматор и формирователь сигналов, причем выходы Первого, i второго и третьего блоков умножения соединены с соответствующими (Л входами сумматора, выход которого подключен к первому входу блока дес ления, второй вход которого соединен с выходом формирователя сигналов, первый вход которого соединен с выходом блока выделения знака сигналов, а второй вход - с выходом , четвертого блока умножения, а выход 1ЧЭ блока деления через логарифмируюоо J 4:: щий блок соединен с входом пятого блока умножения, выход которого является выходом второго функционального преобразователя, первый и второй входы которого являются соответственно входами четвертого и тоетьего блоков умножения, входы первого и второго блоков умножения соединены с входами блока вьщелення знака сигналов и с третьим входом второго функционального преобразователя .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Квакернаак X, Сиван Р | |||
| Линейные оптимальные системы управления | |||
| М., Мир, 1977, с | |||
| Станционный указатель направления времени отхода поездов и т.п. | 1925 |
|
SU434A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
