Изобретение относится к судоремонту, в частности к распылительным устройствам для автоматизированной окраски корпусов стоящих в доке судов.
Известно распылительное устройство для автоматизированной окраски стоящих в доке судов, содержащее подвижную стрелу, передвигаемую в процессе работы непрерывно по путям, на которой установлено подвижное относительно трех осей приспособление для крепления одного или нескольких краскораспылителей (заявка ФРГ № 214281, кл. 65 а, 59, 1974).
Недостатком известного устройства является необходимость выдерживания паузы между нанесением очередного слоя краски.
Цель изобретения - обеспечение непрерывности окрасочных работ и постоянства качества окраски.
Поставленная цель достигается тем, что в распылительном устройстве для автоматизированной окраски корпусов стоящих в доке судов, содержащем подвижную стрелу, передвигаемую в процессе работы непрерывно по путям, на которой установлено подвижное относительно трех осей приспособление для крепления одного или нескольких краскораспылителей, на подвижном приспособлении со стороны обрабатываемой гтоверхности по трем расположенным перпендикулярно друг к другу осям X, у, Z имеется по крайней мере по одному датчику расстояния, выходы которых соединены с соответствующими логическими схемами, выходные сигналы которых подаются к исполнительным органам в качестве управляющего воздействия.
Кроме того, датчик расстояния может состоять из поворотного вокруг центра вращения двуплечего рычага с предварительным натяжением, на одном плече которого расположен подвижно ролик, в то время как второе плечо между центром вращения и точкой приложения усилия предварительного натяжения имеет связь с исполнительным органом,
При этом в качестве датчика расстояния к каждой из трех осей х, у- z может относиться пара чувствительных элементов с выдачей цифровой информации, и чувствительны1 элементы одной пары имеют разные параметры срабатывания.
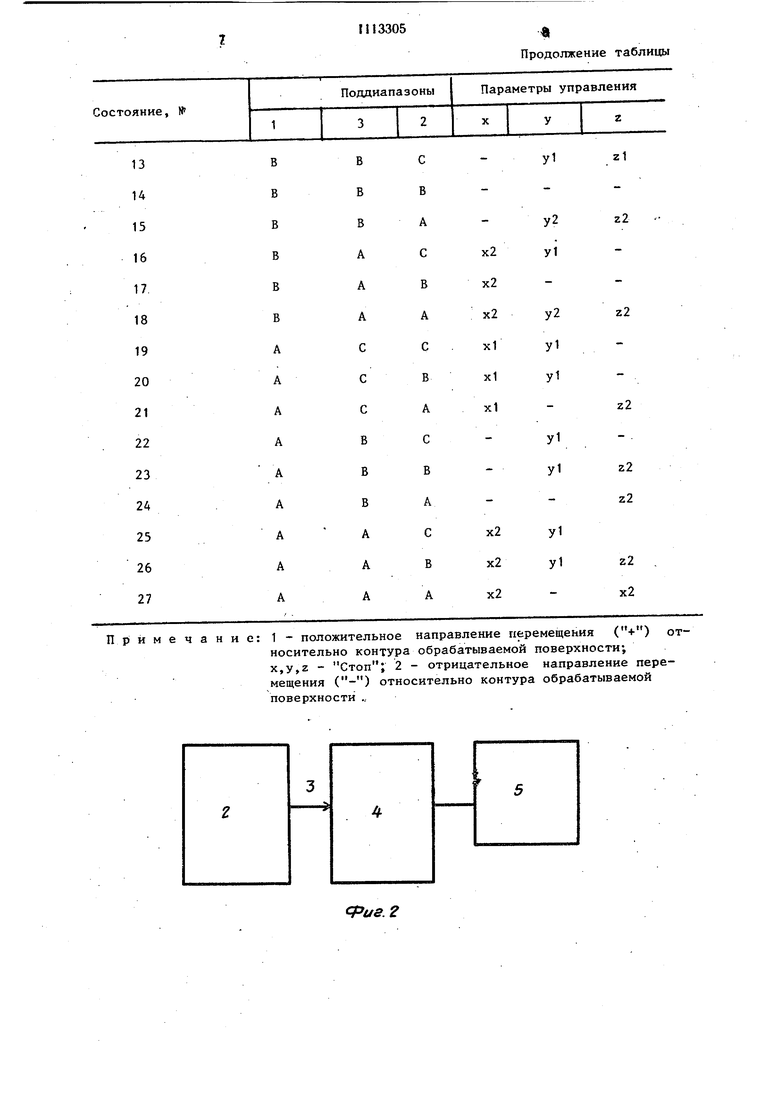
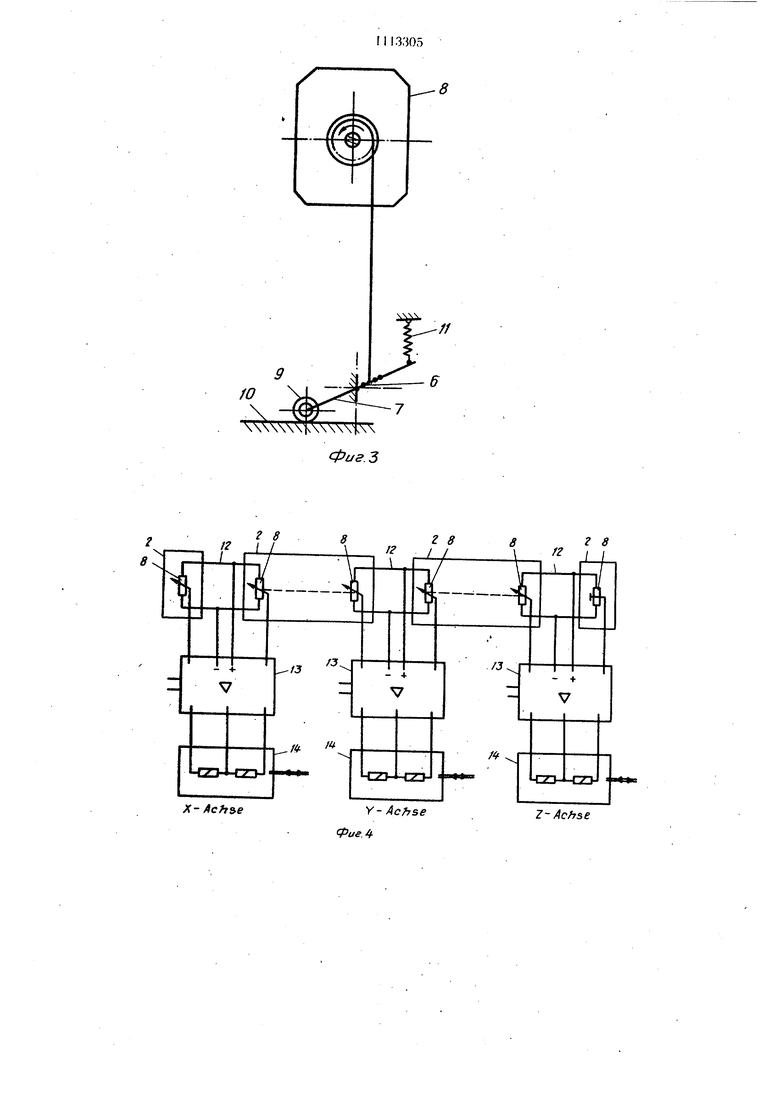
На фиг. 1 представлено расположение датчиков; на фиг. 2 - блок-схема; на фиг. 3принципнальная схема датчика; на фиг. 4 - контактная логическая схема; на фиг. 5 - диаграмма сигналов.
На устройстве (не показано), перемещаемом вдоль дока, установлена подвижная стрела, имеющая на своем свободном конце, направленном в сторону корпуса судна, приспособление .для крепления краскораспылителей. Вокруг оси X совершается вращательное движение, вокруг оси у совершается
таКже вращательное движение, а вокруг Оси Z -- трансляционное движение.
Подвижное приспособление - держатель I краскораспылителей - выполнен с возможностью поворота вокруг трех осей.
На держателе краскораспылителей имеются датчики 2 расстояния, расположенные напротив криволинейной поверхности наружной oбlJJИвки судна. На каждой из трех осей вращения имеется по крайней мере один
датчик 2 расстояния. На каждой из осей, вращения может быть расположено большее число датчиков 2 расстояния. Выходы 3 датчиков 2 расстояния подключены к соответствующей логической схеме 4, представляющей собой вычислительный прибор для определения численных значений и направлений. Выходные сигналы логической схемы 4 подаются в виде управляющих воздействий к соответствующим исполнительным органам 5. Са.ма логическая схема 4 может быть
выполнена контактной или бесконтактной. Исполнение логической схемы целесообразно принять в зависимости от вида выбранных датчиков расстояния.
Сохранение постоянного расстояния между краскораспылителями и обрабатываемой поверхностью имеет большое значение для качества нанесения окраски. Качество окраски определяется в значительной степени равномерностью толщины покрытия. Установка датчиков расстояния не должна оказывать на них отрицательного влияния.
В одном из вариантов исполнения датчик 4 расстояния состоит из поворотного вокруг центра 6 враиаения двуплечего рычага 7 с предварительным натяжением, соединенного с исполнительным органом 8 - гютенциометром. Центр 6 вращения рычага расположен на держателе I краскораспылителей. На плече рычага установлен поворотно ролик 9, соприкасающийся с обрабатываемой поверхностью 10 обшивки
судна. Для поддержания контакта ролика 9 с наружной обшивкой двуплечий рычаг 7 соединен на другом конце с устройством 1I предварительного натяжения, с помощью которого может быть установлено требуемое и допустимое предварительное натяжение.
Плечо рычага 7 имеет также функциональную связь с потенциометром 8. Таким образом, изменения расстояния между центром 6 вращения рычага и обрабатываемой поверхностью 10 воспринимаются как отклонения
и представляются изменением сопротивления на потенциометре 8. Датчики 2 расстояния расположены на держателе I краскораспылителей соответственно трем контролируемым расположенным перпендикулярно друг к другу осям обрабатываемой поверхности 10.
Служащая для оценки логическая схема 4 предсгавляет собой комбииацию нескольких ;мостовых схем 12, в которые введено задан нов значение. При этом несколько потенциометров 8 нескольких мостовых схем 12 расположено на общей осп. Для этой цели используются сдвоенные или строеннь1е ruiтенциометр1 1. При использовании сдвоенных потенциометров управление по отдельным осям осун1ест(ляется носледопательно. При использовании же строенных гютенниометров имеется возможность одновременно с регулировкой баланса моста для одной оси произвести согласование двух других мостов для остальных осей. Выходные сигналы направляются через усилители 13 и подаются к исполнительным органа.м 14 в виде управляющих воздействий.
Таким образом, обеспечивается нужное положение держателя 1 краскораспылителей относительно обрабатываемой поверхности 10, так как дисбалансы мостовых схем определяют величину и направление управляющего воздействия.
При другом варианте исполнения изобретения предусмотрены датчики 2 расстояния, не имеющие контакта с обрабатываемой поверхностью.
В примере исполнения описано попарное расположение чувствительных датчиков 2 с выдачей цифровой информации. К каждой из осей, расположенных перпендикулярно друг к другу, относится пара чувствительных элементов а и в. Их расположение на держателе 1 краскораспылителей принято согласно вышеописанному способу. Благодаря попарному расположению чувствительных элементов имеется возможность получения смещенных относительно друг друга точек срабатывания.
Таким образом, диапазон регулировки каждой оси может быть подразделен на частичные диапазоны (поддиалазоны) и,, следовательно, может быть принято решение о направлении воздействия. При этом используется тот факт, что характеристика переключения цифровых чувствительных элементов имеет форму гистерезиса. Так, при несовпадении положения чувствительных эле-, ментов относительно данной оси происходит переключение в положительном или отрицательном направлении.
На логической схеме 4, выполненной в этом случае бесконтактной, получаются выходные сигналы, подаваемые на соответствующие исполнительные органы 14 в качестве управляющих воздействий.
Ниже приводится описание принципа действия варианта устройства с использованием чувствительных элементов с выдачей цифровой информации. Последние расположены попарно так, что диапазон их действия совпадает с управляемыми осями.
В результате попарного использования цифровых чувствительных элементов формируются два цифровых управляющих параметра, на основании которых может быть получена следующая информация.
Частичный диапазон (поддиапа.юн) А; расстояние между обрабатываемой поверхностью и чувствительным элементом меньше зада аемого значения.
Частичный диапазон В; расстояние между обрабатываемой поверхностью и чувствительным элементом равно задаваемому значснию.
Частичный диапазон С: расстояние между обрабатываемой поверхностью и чувствительным элементом больше задаваемого значения.
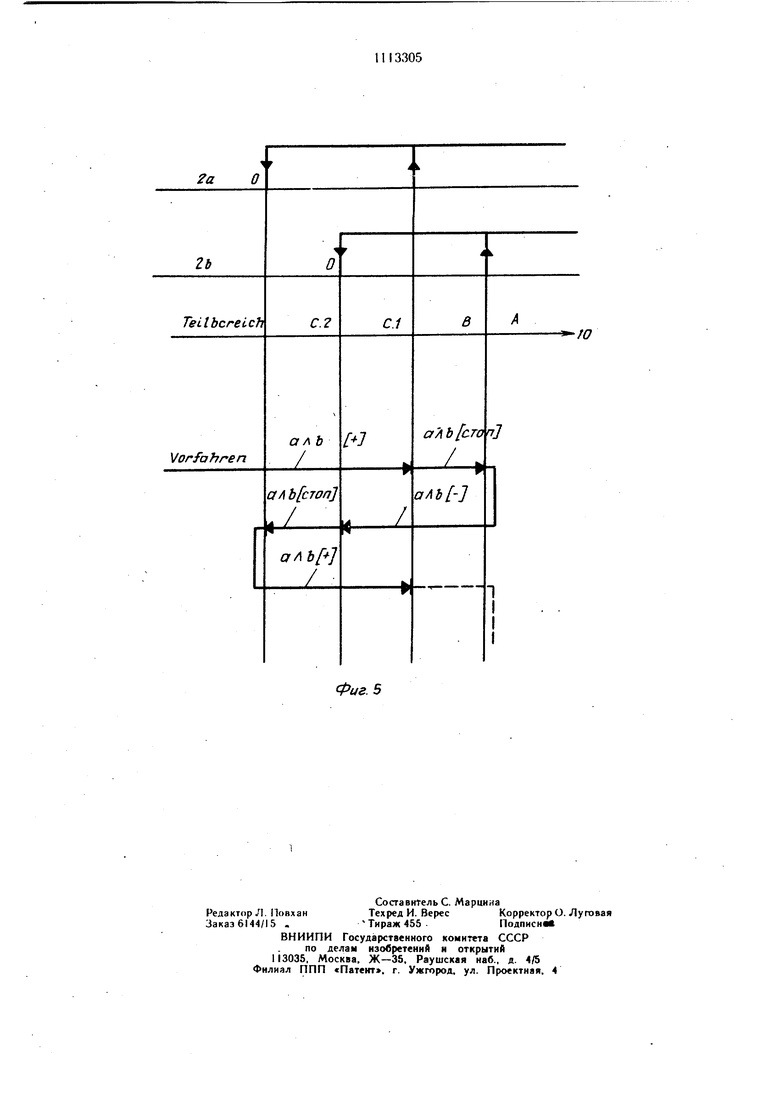
Это означает, что диапазон изменения исполнительного воздействия на одну ось разбит на три характерных поддиапазона сог.дасно фиг. 5. Для определения трех частичных диапазонов (поддиапазонов) каждой оси на фиг. 5 показаны состояния пары чувствительных элементов айв. Геометрическое расположение чувствительных элементов выбрано так, что диапазон действия пары находится на соответствующей оси, выдача сигналов чувствительными элементами прс1ис.ходит при различных отстояниях от обрабатываемой поверхности.
Далее следует ожидать выбега, так как будет сказываться свойство движущихся масс в отношении скачкообразного изменения скорости перемещения. При применении гидравлических исполнительных органов следует ожидать дрейфа . С учетом этих обстоятельств частичные диапазоны одной оси и соответствующие направления воздействия исполнительных органов могут быть описаны следующим образом.
Поддиапазон C.I: а Л Ь направление воздействия «-f, а Л b направление воздействия «-..
Поддиапазон C.2j а Л Б направление воздействия «-f, а А b «Стоп.
Поддиапазон В: а Л В «Стоп, а Л b направление воздействия «-.
Поддиапазон А: а Л b направление воздействия «-.
В нижней части фиг. 5 показаны движения (перемещения) в результате положительных и отрицательных воздействий. Стрелками показаны направления движения. Показано также прохождение предельных значений (точек переключения) вследствие инерции массы.
Если аналогично примеру применять в качестве исполнительных органов сервоклапаиы, то в соответствии с вышеизложенным по окончании управляемого движения наблюдается дрейф в направлении « ±. В данном случае исходили из того, что направление дрейфа предварительно задано. В примере исполнения принят дрейф по оси z в направлении контура обрабатываемой поверхности 10.
С учетом вышеизложенного краевого условия на фиг. 5 получеиы следующие характеристики движения.
Г. Воздействие , условие переключения
ал Ь, поддиапазоны С.2 и С.1. 2. Переключение исполнительного органа на «Стоп, условие переключения а Л Ь, поддиапазон В.
Дрейф в поддиапазоне В. Воздействие «-, условие переключения аЛ Ь, поддиапазоны А. В, С.1. С.2. Дрейф в поддиапазонах С.1 и С.2.
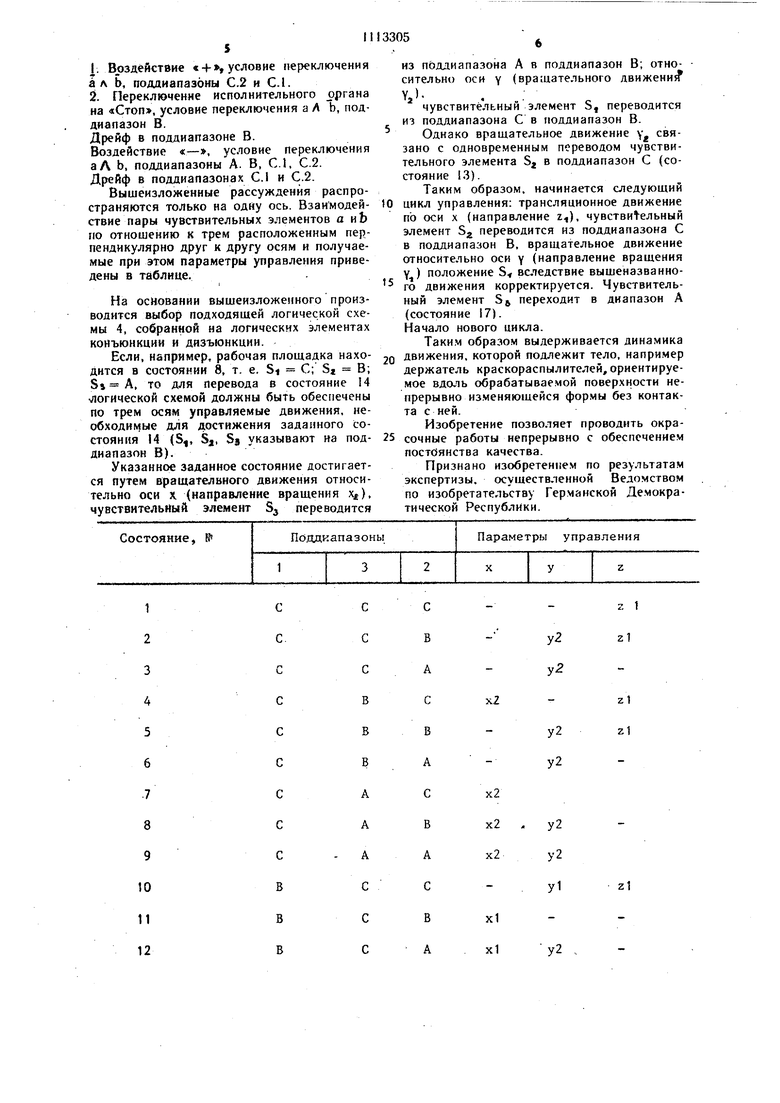
Вышеизложенные рассуждения распространяются только на одну ось. Взанмодействие пары чувствительных элементов а иЬ по отношению к трем расположенным перпендикулярно друг к другу осям и получаемые при этом параметры управления приведены в таблице.
На основании вышеизложенного производится выбор подходящей логической схемы 4, собранной на логических элементах конъюнкции и дизъюнкции.
Если, например, рабочая площадка находится в состоянии 8, т. е. Si С; S В; , то для перевода в состояние 14 логической схемой должны быть обеспечены по трем осям управляемые движения, необходимые для достижения заданного состояния 14 (S,, Sa, Sj указывают на поддиапазон В).
Указанное заданное состояние достигается путем вращателвиого движения относительно оси X (направление вращения х), чувствительный элемент S переводится
из поддиапазона А в поддиапазон В; относительно оси Y (вращательного движений
чувствительный элемент S, переводится из поддиапазона С в поддиапазон В.
Однако вращательное движение у связано с одновременным переводом чувствительного элемента Sj в поддиапазон С (состояние 13).
Таким образом, начинается следующий
цикл управления: трансляционное движение по оси X (направление г), чувствительный элемент Sg переводится из поддиапазона С в поддиапазон В, вращательное движение относительно оси Y (направление вращения Y ) положение S., вследствие вышеназванного движения корректируется. Чувствительный элемент S переходит в диапазон А (состояние 17). Начало нового цикла.
Таким образом выдерживается динамика
движения, которой подлежит тело, например держатель краскораспылителей, ориентируемое вдо«1Ь обрабатываемой поверхности непрерывно изменяющейся формы без контакта с ней.
Изобретение позволяет проводить окрасочные работы непрерывно с обеспечением постоянства качества.
Признано изобретеи1 ем по результатам экспертизы, осуществленной Ведомством по изобретательству Германской Демократической Республики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для окраски и сушки изделий | 1986 |
|
SU1426652A2 |
| Установка для окраски | 1981 |
|
SU1003920A1 |
| Краскораспылительная установка | 1980 |
|
SU1269851A1 |
| Устройство для обработки поверхности судов | 1977 |
|
SU897634A1 |
| Манипулятор для обработки корпусных конструкций судов | 1979 |
|
SU789323A1 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |
| Устройство для очистки и окраски корпуса судна в доке | 1986 |
|
SU1375504A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2012 |
|
RU2518806C2 |
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
| УСТРОЙСТВО ДЛЯ НАРУЖНОЙ ПОВЕРХНОСТНОЙ ОБРАБОТКИ КОРПУСА СУДНА | 1992 |
|
RU2088471C1 |
1. РАСПЫЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ОКРАСКИ КОРПУСОВ СТОЯЩИХ В ДОКЕ СУДОВ, содержащее подвижную стрелу, передвигаемую в процессе работы непрерывно по путям, на которой установлено подвижное относительно трех осей приспособление для крепления одного или нескольких .краскораспылителей, отличающееся тем, что, с целью обеспечения непрерывности окрасочных работ и постоянства качества окраски, на подвижном приспособлении стороны обрабатываемой поверхности по трем рас-, положенным перпендикулярно друг к другу осям X, у, Z имеется по крайней мере по одному датчику расстояния, выходы которых соединены с соответствующими логическими схемами, выходные сигналы которых подаются к исполнительным органам в качестве управляюшего воздействия. .2. Устройство по п. 1, отличающееся тем, что датчик расстояния состоит из поворотного вокруг центра врашения двуплечего рычага с предварительным натяжением, на одном плече которого расположен подвижно ролик, в то время как второе плечо между центром врашения и точкой приложения усилия предварительного натяжения имеет связь с исполнительным органом. мС 3. Устройство по п. 1, отличающееся тем, 8 что в качестве датчика расстояния в каждой (Л из трех осей х, у. z относится пара чувст вительных элементов с выдачей цифровой с информации, и чувствительные элементы одной пары имеют разные параметры сраг батывания. С ОР о сд
С
С.
С
с с с с с с в в
Z 1
С
У2 У2
В А С В А С В А С В А
Zl
Zl
х2
У2 У2 Zl
х2 х2
У2 У2 У1 х2
Zl
х1
У2 х1
В В В В В В А А А А А А А А А Примечание:
Продолжение таблицы
С В А С
У1
z1 У2
z2
yi
х2
х2
В А С В А С В А С В А
У2 У1
х2
z2
хГ
х1 У1
z2
х1
У1 У1
г2 z2
х2
У1 х2 У1
г2 х2 x2
ие.2 1- положительное направление перемещения (+) относительно контура обрабатываемой поверхности; x,y,z - 2 - отрицательное направление перемещения (-) относительно контура обрабатываемой поверхности .,
8
Фиг. 5
