(54) УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ СУДОВ


| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для очистки и окраски корпусов судов | 1978 |
|
SU789320A1 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1105387A1 |
| Автоматическое устройство для обработки корпусов судов | 1978 |
|
SU789318A1 |
| Устройство для обработки корпуса судна в доке | 1982 |
|
SU1039803A1 |
| Устройство для спасения людей | 2017 |
|
RU2680363C1 |
| Устройство для очистки корпуса судна | 1983 |
|
SU1134473A1 |
| Манипулятор для обработки корпусных конструкций судов | 1979 |
|
SU789323A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНАВСЕСОЮЗНАЯnATEHTHO-TEXH^^iECri^r | 1970 |
|
SU282800A1 |
| Устройство для очистки и окраски корпусов судов | 1978 |
|
SU713762A1 |
| Устройство для автоматической очистки и окраски судового корпуса | 1977 |
|
SU770923A1 |


1
Изобретение- относится к судоремонту, в частности к устройствам для обработки поверхности судов.
Известно устройство для обработки наружных поверхностей корпусов судов, содержащее телескопическую или ломающуюся стрелу, которая шарнирно или вертикально устанавливается на подвижную платформу, перемещающуюся по палубе дока или эллинга 1.
Такое устройство может удовлетворительно работать при ровных палубах доков и достаточном пространстве для их перемещения, но не может работать в еще не осущенном доке и требует мощного источника питания, в качестве которого обычно применяются дизельные моторы, устанавливаемые на платформе, или стационарные источники, имеющиеся на борту дока, энергия от которых передается устройству посредством гибкого кабеля. Дизельные моторы не всегда можно применять на построечных местах в судостроении или судоpejviOHTe, например в условиях сухого дока не допускается их применение ввиду вызываемой ими загазованности.
Наиболее близким к предлагае.мому ло технической сущности и достигаемому результату является устройство для обработки поверхности судов, содержащее подвижную каретку с рамой, размещенную на направляющих, при этом к раме с помощью щарнира с вертикальной осью вращения прикреплена стойка, которая с помощью щарнира с горизонтальной осью вращения соединена со стрелой, причем ее свободный конец щарнирно связан с корзиной для рабочего, имеющей держатель с рабочими
10 приспособлениями и датчики отслеживания обрабатываемой поверхности 2.
Однако для обработки всего корпуса судна этим устройством необходимо, как
5 минимум, два одинаковых манипулятора, навещиваемых на противоположные стенки доков, причем при многорядной постановке судов в доках обработку можно произвести только с одной стороны судна. Кроме того, расположение щарнирного сочленения на
20 уровне верхнего края стенки дока (при прямой несгибающейся стреле) не позволяет устройству обрабатывать скуловую и днищевую части корпуса.
Цель изобретения - упрощение конструкции и удобство в эксплуатации.
Для достижения цели стрела устройства кинематически связана с корзиной, а рама выполнена в виде телескопической трубы, причем стойка смонтирована с возможностью поворота на угол не менее 270° в горизонтальной плоскости, при этом корзина снабжена рычагом, планшайбой, гидроцилиндром и неполноповоротным гидромотором со статором и валом, причем на передней стенке корзины с помощью горизонтального шарнира укреплена планшайба, при этом один конец рычага шарнирно связан с планшайбой, а на другом конце жестко укреплен статор неполноповоротного гидромотора, причем рычаг смонтирован с возможностью поворота на 90° относительно планшайбы с помощью гидроцилиндра в вертикальной плоскости, а на конце вала гидромотора жестко укреплены датчики, выполненные бесконтактными, и держатель рабочих приспособлений.
Кроме того, кинематическая связь стрелы с корзиной содержит звездочки, цепи и оси, причем две звездочки спарены между собой и свободно установлены на оси у верхнего концр стрелы, при этом одна из парных звездочек посредством одной цепи соединена со звездочкой, ось которой жестко соединена со стойкой, а другая парная звездочка - с помощью другой цепи со звездочкой, ось которой жестко соединена с корзиной в месте ее шарнирного соединения со стрелой.
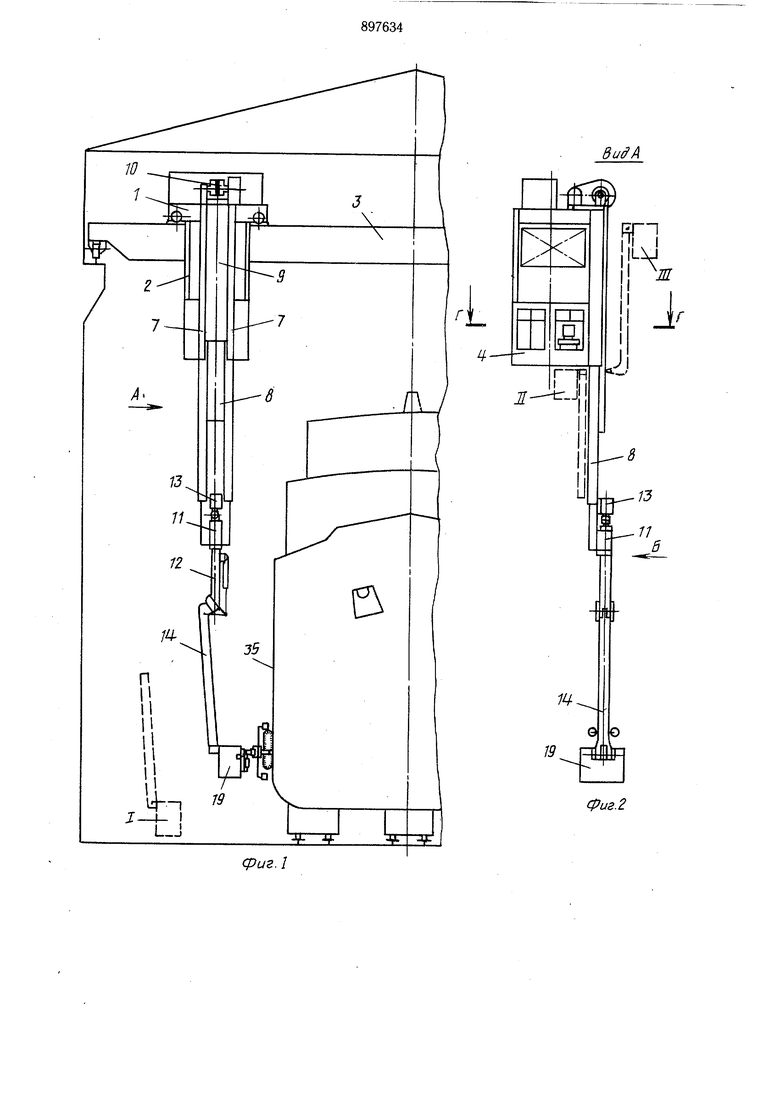
На фиг. 1 изображено предлагаемое устройство, обший вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3, кинематическая связь стрелы с корзиной; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - вид Д на фиг. 3; на фиг. 7 - корзина с рабочими приспособлениями и датчиками; на фиг. 8 - схема электрогидравлической следящей системы.
Устройство содержит подвижную каретку 1 с рамой 2, размещенную на направляющих 3. К раме 2 прикреплена кабина 4 с отделением 5 для красйонагнетательного насоса и лакокрасочных материалов и отделением 6 для оператора с ручными и автоматическими средствами управления устройством. Рама 2 содержит направляющие 7 и телескопическую трубу 8, нижний конец которой подвешен на тросе 9 к барабану лебедки 10. К нижнему концу телескопической трубы- 8 с помощью шарнира 11 с вертикальной осью вращения прикреплена стойка 12 и неполноповоротный гидродвигатель 13. Стойка 12 шарнирно сочленена со стрелой 14, имеющей горизонтальную ось поворота 15 с помощью гидроцилиндра 16 и многозвенного шарнирного механизма 17. Конец стрелы 14 прикреплен шарнирно к
проушине 18 корзины 19. В полую часть стрелы 14 встроен механизм, состоящий из цепной звездочки 20, установленной в щар-, нирном узле между стойкой 12 и стрелой .14 и жестко скрепленной со стойкой 12. Б верхнем конце стрелы 14 имеется ось 21,
на которой свободно установлены спаренные промежуточные звездочки 22. В шарнирном узле 23 проушины 18 корзины 19 установлена звездочка 24, жестко сцепленная с корзиной 19. Звездочка 20 в шарниo ре стрелы 14 связана цепью 25 с промежуточной звездочкой 22. Звездочка 24 в шарнире проушины 18 корзины 19 связана цепью 25 со второй промежуточной звездочкой 22. Промежуточные звездочки 22 соединены между собой жестко. На передней стенке корзины 19 прикреплен червячный редуктор 26, имеющий привод от двигателя 27 (например гидромотора). На выходной конец вала редуктора 26 насажена планшайба 28 с проушиной 18 и шарниQ рами для крепления рычага 29 и гидроцилиндра 30. На конце рычага 29 статорной частью с ней сочленен неполноповоротный гидродвигатель 31 с двумя выходными валами, на которые жестко крепится держатель 32 рабочих приспособлений 33 и
5 электромагнитные датчики 34 для отслеживания поверхности 35 корпуса судна. Кабина 4 оператора имеет в полу люк 36 для доставки материалов. Для привода механического инструмента держатель снабжается двигателем 37.
Устройство работает следуюшим образом.
Оператор, управляя приводом перемещения подвижной каретки 1, подводит стрелу 14 с рабочими приспособлениями 33 к обрабатываемой поверхности конструкции 35 в требуемом месте. Управляя лебедкой 10 и гидроцилиндром 16, устанавливают рабочие приспособления 33 на требуемой высоте. Затем включают привод перемещения тележки, и устройство автоматически обеспечивает обработку продольной полосы корпусной конструкции, удерживая приспособления на заданном расстоянии от обрабатываемой поверхности и ориентируя инструмент по нормали к ней. Гидроцилиндр 30 позволяет ориентировать инструмент относительно поверхностей корпуса, имеющих отрицательный наклон. Для обработки поверхностей, имеющих положительный наклон в плоскости поперечного сечения корпуса (например наружная поверхность носовой бульбы крупнотоннажного танкера), планшайба 28 должна быть повернута на 180° с помощью редуктора 26. При обработке конструкции, включающей такие операции, как очистка щетками, обезжиривание, прошкуривание, зачистка сварных швов, применяются вращающиеся инструменты с приводом от двигателя 27,
а при гидродинамической очистке или окраске безвоздушным распылением лакокрасочного материала применяются окрасочные или очистные штанги с соплами.
В процессе подготовки к работе корзина 19 для рабочего на уровне пола дока загружается необходимыми материалами и оборудованием и с помош.ью механизмов складывания трубы 8, разворота стрелы 14 и складывания стойки 12 при работаюшем кинематическом механизме подводится оператором к люку 36 кабины в положение II.
Для проезда над обрабатываемой конструкцией телескопическая труба полностью складывается, а стойка со стрелой приводится в положение III. При этом возможность работы по всему периметру обрабатываемой конструкции обеспечивается разворотом стойки 12 « стрелы 14 с помощью неполноповоротного гидродвигателя 13 вокруг вертикальной оси на угол 270°. Таким образом, оператору необходимо стойку со стрелой и корзиной в положении III «перенести над конструкцией, развернуть в требуемом месте с помошью гидроцилиндра 16 и лебедки 10 и повернуть плечо на 180°, чтобы передняя стенка корзины 19 и рабочие приспособления 33 были обрашены к обрабатываемой поверхности 35.
Автоматическое поддержание заданного зазора „между рабочими приспособлениями 33 и обрабатываемой поверхностью 35 и ориентация их по нормали к ней могут быть обеспечены, например, с помощью регулятора, состояшего из электрогидравлических следящих систем.
Регулятор состоит из каналов с элементами сравнения 37.1, 37.2 и 37.3, электронными усилителями 38.1, 38.2 и 38.3, электрогидравлическими преобразователями 39.1, 39.2 и 39.3 и исполнительными механизмами 40.1, 40.2 и 40.3 в цепи обратной связи. Накрест лежащие датчики 41.1 и 41.2 передают сигналы, пропорциональные по величине зазорам а и аг с противоположными знаками, в 37.1, сигнал рассогласования усиливается в 38.1, преобразуется в расход жидкости в 39.1 и управляет гидравличесКИМ цилиндром 40.1 (гидроцилиндр 30) до тех пор, пока Ci становится равным aj. Аналогично работает канал с 37.2, 38.2 и 40.2 и датчиками 41.3 и 41.4, в котором роль 40,2 исполняет неполноповоротный гидромотор 31. Одновременно сигналы датчиков 41.1-41.4, имеющие полярность такую же, как .знак отклонения зазора а от номинального заданного Оо, подаются с одинаковыми знаками в 37.3 для управления 40.3 роль которого выполняет гидрог двигатель 13, разворачивающий согнутую стойку со стрелой таким образом, чтобы расстояние между рабочими приспособлениями 33 и корпусом .оставалось неизменным. Угол oL может изменяться в пределах от 0° до 270°.
Использование предлагаемого устройства позволяет механизировать- и автоматизировать трудоемкие процессы очистки и.окраски поверхности корпусных конструкций судов в условиях стапельных меет эллингов или доков, повысить производительность труда при проведении работ в судостроении и судоремонте, улучшить санитарногигиенические условия труда обслуживающего персонала.
Формула изобретения
I. Устройство для обработки поверхности судов, содержащее подвижную каретку с рамой, размещенную на напраляющих,. при этом к раме с помощью щарнирй с вертикальной осью вращения прикреплена стойка, которая с помощью шарнира с горизонтальной осью вращения соединена со стрелой, причем ее свободный конец щарнирно связан с корзиной для рабочего, имеющей держатель с рабочими приспособлениями и датчики отслеживания обрабатываемой поверхности, отличающееся тем, что, с целью упрощения конструкции и удобства в эксплуатации, стрела устройства кинематически связана с корзиной, а рама выполнена в виде телескопической трубы, причем стойка смонтирована с возможностью поворота на угол не менее 270 в горизонтальной плоскости, при этом корзина снабжена рычагом, планшайбой, гидроцилиндром и неполноповоротным гидромотором со статором и валом, причем по передней стенке корзины с помощью горизонтального шарнира укреплена планшайба, при этом один конец рычага шарнирно связан с планщайбой, а на другом конце жестко укреплен статор неполиоповоротного гидромотора, причем рычаг смонтирован с возможностью поворота на 90° относительно планщайбы с помощью гидроцилиндра в вертикальной плоскости, а на конце вала гидромотора жестко укреплены датчики, выполненные бесконтактными, и держатель рабочих приспособлений.
принятые во внимание при экспертизе
кл. В 60 S 3/02, опублик. 1974 (прототип).
(риг. I
дид б
qJu2.3
в-в
/
фиг.Ч
