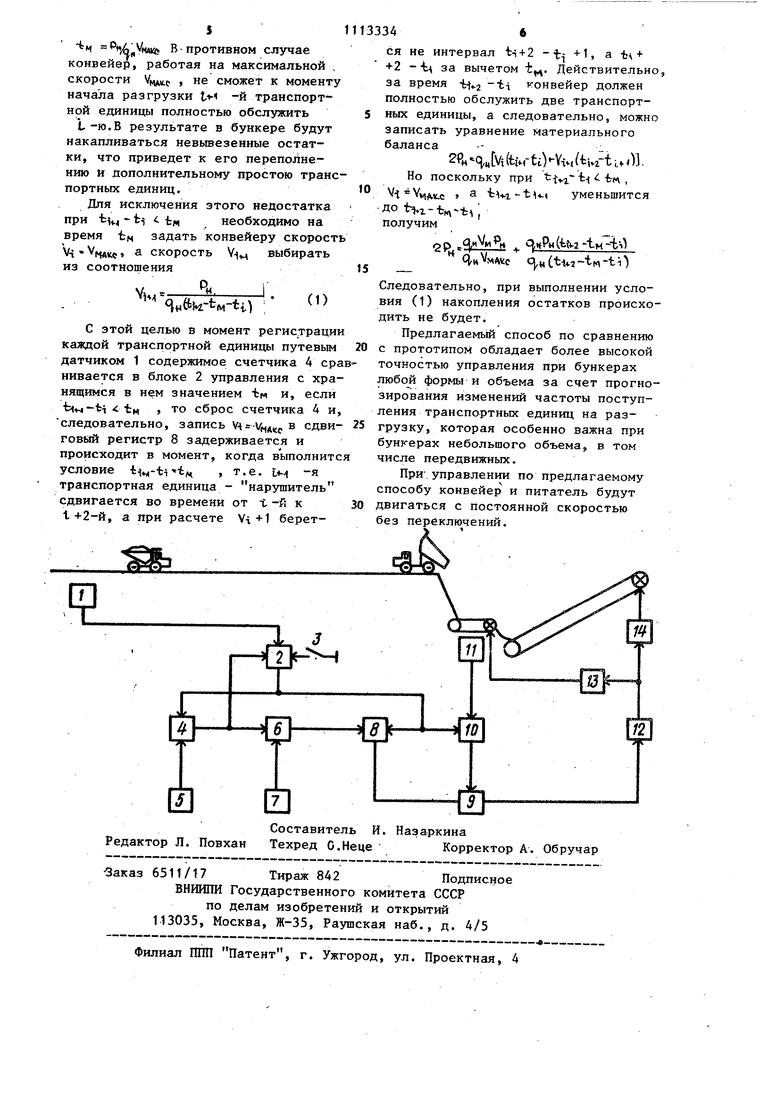
I Изобретение относится к циклично поточным транспортным системам и может быть использовано в горнодобы вающей и других отраслях промьппленн ти для транспортирования сыпучих грузов. Известен способ управления скоростью конвейера, при котором ско;рость конвейера изменяют в зависимости от фактической производительности питателя, регистрируемой с помощью тензорезисторного датчика с лы, на котором подвешена рама питателя 11. Недостатками известного способа являются низкая точность управления обусловленная слабой зависимостью производительности питателя от коли чества горной массы в бункере, а также сложность реализации при обыч но используемых в схемах цикличнопоточной технологии пластинчатых питателях тяжелого типа масса кото рых достигает. 125 т. Наиболее близким к изобретению является способ управления скорость конвейера, основанный на одновремен ном изменении производительности питателя и скорости конвейера в зависимости от загрузки бункера транс портными единицами С23. Недостатком данного способа явля ется низкая точность управления. В случае, когда размеры бункера в плане и по высоте соизмеримы, недостаток обусловлен невозможностью точного измерения уровня горной массы в бункере, поскольку поверхность ее негоризонтальна - отдельные участки наклонены под углом естественного откоса. При налипании или зависании горной массы появляет ся систематическая погрешность - ко вейер Ьудет двигаться с завьшенной скоростью, не зависящей от фактичес кого количества горной массы в бункере. В случае, когда объем бункера соизмерим с объемом кузова транспор ных единиц, разгружающихся в него, при таком способе управления происх дит несколько переключений скорости конвейера за время обслуживания одной транспортной единицы даже при строго Периодичном поступлении их на разгрузку, что приводит к снижению срока службы грузонесущего элемента конвейера. Таким образом, известный способ обеспечивает приемлемую точность управления только в 42 случае бункера большого объема с размером в высоту, значительно превышающим размеры в плане, но такие бункера при открытой разработке прак« тически не используются. Целью изобретения является повышение точности управления. Указанная цель достигается тем, что согласно способу управления скоростью конвейера, заключающему в одновременном изменении производительности питателя и скорости конвейера в зависимости от загрузки бункера транспортными единицами, определяют время начала проезда каждой транспортной единицы к бункеру на расстоянии, равном длине неразветвленного участка пути, фиксируют момент начала разгрузки каждой транспортной единицы и управляют скоростью конвейера по закону Ян(К, tif -tn , , , t-i.- )Кн 0|Кг-4 де -t- , зафиксированное время проезда соответствующихтранспортных единиц; Р - номинальная грузоподъемностьтранспортной единицы; о,- номинальная погонная нагрузка конвейера; . - максимальная скорость конвейера. На чертеже представлена блок-схеа устройства управления скоростью онвейера, реализующего предлагаемый пособ. Устройство содержит путевой датчик 1, связанный с одним из входов блока управления, к второму входу коорого подключен тумблер 3 Пуск, а третьему - выход счетчика 4, четный вход которого связан с тайером 5, а вход установки в ноль - выходом блоЛа 2 управления. Выход четчика 4 подключен также к входу елителя блока 6 деления, вход де3-1
лимого которого связан с регистром
7 памяти, а выход - с информационным входом сдвигового регистра 8, выход которого подключен к входу мультипле сора 9. Его адресная шина связана с выходом реверсивного счетчика 10, вычитающий вход которого подключен к датчику 11 разгрузки, а суммирующий, совместно с тактирующим входом сдвигового регистра 8 - к выходу блока 2 управления. Выход мультиплексора 9 связан с входом цифро-аналогового преобразователя (ЦАП) 12, выход которого соединен одновременно с входами регулятора 13 производительности питателя и регулятора 14 скорости конвейера.
Устройство работает следующим образом.
В исходном состоянии транспортных единиц нет, бункер пуст, тумблер 3 замкнут, блок 2 управления блокирует по входам установки в ноль счетчик 4, сдвиговый регистр 8, реверсивньш счетчик 10 (на чертеже эти цепи не показаны). На выходе мультиплексора 9 - нули, на входах регуляторов 13 и 14 напряжение равно нулю, поэтому питатель остановлен, а лента конвейера движется с минимальной, ползучей скоростью благодаря соответствующей настройке регулятора 13 1. ,
Для приведения устройства в рабочее положение тумблер 3 размыкают, подготавливая устройство к снятию блокировки передним фронтом импульса регистрации, который произойдет при проезде первой транспортной единицы в момент времени -ij мимо путевого датчика 1 в направлении бункера. При этом задним фронтом этого импульса с выхода путевого датчика 1 производится запись единицы в реверсивный счетчик 10, однако в первую ячейку сдвигового регистра 8 при этом записьгоаются нули, поскольку на выходе счетчика 4 в этот момент еще ноль, а в блоке 5 деления предусмотрена блокировка от деления на ноль. Через интервал времени, определяемый периодом следования импульсов с выхода таймера 5, счетчик 4 начинает заполняться, его содержимое возрастает линейно во времени, а на выходе блока 6 деления появляется код, обратно пропорциональный текущему времени и прямо пропорциональный коэффициен33344
ту значение которого хранится в регистре 7 памяти. Паэтому при регистрации в момент времени t. второй транспортной единицы в первую ячейку памяти (строку) сдвигового регистра 8 будет записано значение скорости конвейера V4 , выбранное для обслуживания первой транспортной единицы ((t2t(),j , а в реверсивный счетчи 10 добавится еще одна единица, поэтому мультиплексор 9 будет считьтать код, записанный во вторую строку сдвигового регистра 8. А поскольку во второй строке нули, состояние питателя и конвейера не изменится. При регистрации путевым датчиком 1 в момент времени -t третьей транспортнрй единицы в первую строку сдвигового регистра 8 будет записано значение Va-f /awttrti), , а V, перепишется во вторую. При этом в реверсивном счетчике 10 будет записано число три и т.д. В момент начала разгруз ки первой транспортной единицы с датчика 11 1)азгрузки на вь1читающий вход реверсивного счетчика 10 поступит короткий импульс, который уменьшит его содержимое на единицу. Мультиплексор 9 пс изменившемуся адресу приступит к чтению строки сдвигового регистра 8, где записано значение 4i , а на выходе ЦАП 12 появится соответствующий аналоговый .сигнал. Регулятор 14 задаст конвейе-.
ру скорость V, , а регулятор 13 - соответствующую производительность питателю.- Когда датчик 11 разгрузки зарегистрирует разгрузку второй {транспортной единицы, содержимое реверсивного счетчика 10 уменьшится еще на единицу и мультиплексор 9 перейдет к чтению строки сдвигового регистра 8, где записано значение Yj и т. д. На длительность
5 интервала чтения выбранной строки, например той, где записано значение Vj , не повлияет появление у путевого датчика 1 очередной транспортной единицы, поскольку одновре0 менно изменятся содержимое реверсивного счетчика 10 и адреса строк сдвигового регистра 8.
Все вьшхе изложенное относится к случаю, когда каждый интервал между
5 следующими друг за другом транспортными единицами : 1„-ti больше, чем минимальное время обслуживания конвейером одной транспортной едийицы
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля веса материала в бункерах | 1983 |
|
SU1143989A1 |
| Устройство для управления дозатором | 1985 |
|
SU1283537A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство контроля веса материала в бункерах | 1980 |
|
SU972243A1 |
| Устройство для управления дозатором | 1986 |
|
SU1413436A2 |
| КРЕМНИЕВЫЙ МУЛЬТИПЛЕКСОР | 2015 |
|
RU2602373C1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Конвейерные весы | 1978 |
|
SU717552A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162248C2 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ КОНВЕЙЕРА, основанный на одновременном изменении производительности питателя и скорости конвейера в зависимости от загрузки бункера транспортными единицами, отличающийся тем, что, с целью повышения точности управления, определяют время начала проезда каждой транспортной единицы к бункеру на pacqтoянии, равном длине неразветвленного участка пути, фиксируют момент начала разгрузки каадой транспортной единицы и управляют скоростью конвейера по. закону . . . VMu,l,-.Kativ,-iO при blVi-ti -1 К,, Кг-Р4l« He K . - -где : , , , i - зафиксированное время проезда . (Л соответствуищих транспортных единиц; Р« - номинальная грузоподъемность , трансЯортной единицы; - номинальная погонная нагруз00 ка конвейера; со V - максимальная 00 4 скорость конвейера.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU153683A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лисовский B.C | |||
| и др | |||
| Оптимизация размеров загрузочного бункера конвейерной линии с регулируемым приводом.-Вестник Киевского политех-нического института, Горная электромеханика и автоматика, вып | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Киев, Вища школа, 1981, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
