1
Изобретение относится к устройствам для ;ш.хвата и фиксации цилиндрических предметов, например труб, и может использоваться в нефтяной иромьинленности, а именно нри сиуско-нодъемных операциях с утяжеленными бурильными трубами с захватом за их гладкую наружную иоверхность.
Известно устройство для захвата и фиксации цилиндрических тел, иреимуихественно труб, которое содержит кориус с коническими опорными иоверхностями и заиорные тела 1.
Недостатком данного устройства является ненадежность захвата и удержания труб за гладкую часть трубы.
Наиболее близким к предлагаемому является устройство для захвата и фиксации цилиндрических тел, преимущественно труб, включающее кориус с коническими оиорными секциями и запорные тела, выполненные в форме витков замкнутой спирали вписанной в тор 2.
Однако известное устройство не позволяет проводить спуско-нодъемные операции с трубами-, так как не обеспечивается управление процесса.ми захвата и освобождения труб.
Цель изобретения - обеспечение воз.можности проведения спуско-нодъемных операций с трубами путем управления процессами захвата и освобождения тр.уб.
Указанная цель достигается тем, что устройство для захвата и фиксации цилиндрических тел, преимущественно труб, включающее корпус, с коническими опорными секциями и запорные тела, выполненные в форме витков замкнутой спирали, вписанной в тор, снабжено управляющей втулкой, кольцами с круговым выступо.м и углублением (карманом), неподвижно установленными над опорными секциями, толкателем, установленным в корпусе с возможностью осевого перемещения, фиксаторо.м, выполненным в виде подпружиненного рычага для взаимодействия с захватываемой трубой, и ободом с кулачковыми прорезями, имеющим возможность углового перемещения и взаимодейстция с толкателем, соединенным при помощи упругих поводков с управляющей втулкой.
Упругие поводки выполнены в виде пружин.
Кроме того, управляющая втулка и опорные секции выполнены с коническими расточка.ми.
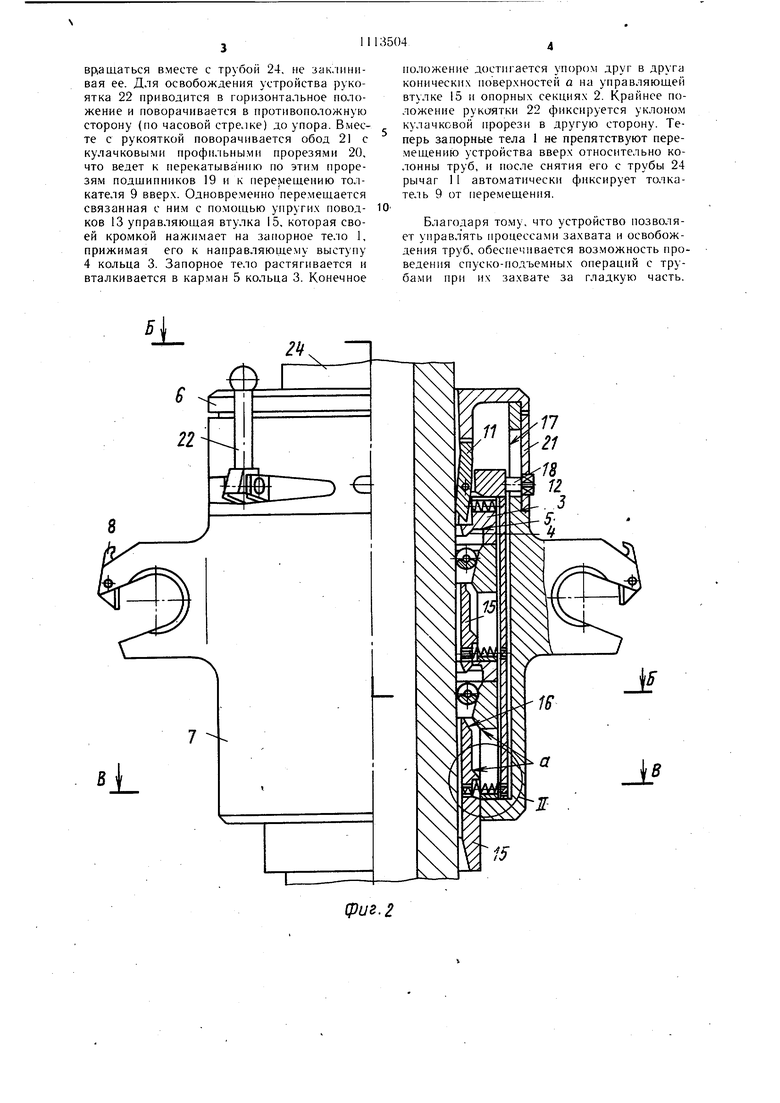
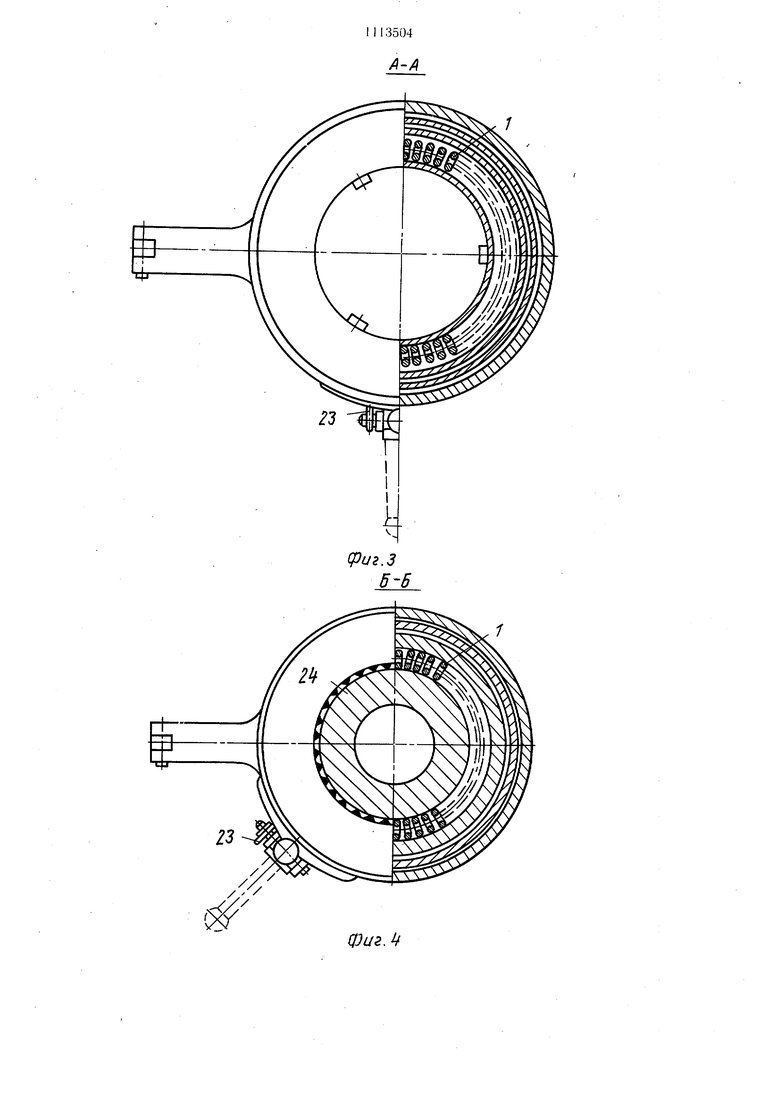
На фиг. 1 изображено устройство в открытом положении, общий вид; на фиг. 2 - то же, в рабочем положении; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - узел I на фиг. 1; на фиг. 7 - узел II на фиг. 2.
Устройство содержит запорные тела I, размещенные между опорными секциями 2 и кольцами 3 с направляющим выступом 4 и карманом 5, которые закреплены с помо5042
щью крышки 6 в корпусе 7, имеющем проушины с предохранительными собачками 8. Внутри корпуса размещен толкатель 9 в виде трубы, имеющий на верхнем конце выс точку 10, взаимодействующую с рычагом И, поджатым пружиной 12. На толкателе 9 закренлены унругие поводки 13, проходящие через окпа 14 в опорных секциях 2 к управляющей втулке 15 с фаской 16. В верхней части корпуса 7 выполнены окна 17, через
0 которые проходят пальцы 18, закрепленные одним концом на толкателе 9, а на другом установлены подщипники 19, взаимодействующие с кулачковы.ми прорезя.ми 20, выполненными в ободе 21, имеющем возможность
, углового перемещения относительно оси устройства с помощью откидной рукоятки 22 с пружиной 23.
Устройство работает следующи.м образом.
Для захвата трубы 24 устройство, под0 вещенное на щтропах за проущины корпуса 7, надвигается на конец трубы. 24, при этом последняя давит на выступающий конец рычага 11, сжимая пружину 12, и выводит верхний конец рычага 11 из выточки 10.
Рукоятка 22 откидывается на 90° в плоскости, проходящей через оси трубы, и поворачивается на 50-70° (против часовой стрелки) в плоскости, перпендикулярной оси трубы, вместе с ободом 21, и, поскольку р-ыQ чаг 11 выведен трубой 24 из выточки 10 толкателя 9, то становится возможным продвижение подщипника 19 по кулачковой прорези 20, т. е. осуществляется пере.мещение толкателя 9 вниз, что ведет к перемещению поводков 13 и закрепленной на них
5 управляющей втулки 15. Одновременно запорное тело 1, находящееся, в кармане 5 кольца 3, получает свободу перемещения и входит в контакт с трубой 24, и так как внутренний диаметр запорного тела 1 несколько меныне диа метра захватываемой трубы
24, то оно под некоторым натягом фиксируется на этой трубе. Далее осуществляется подъем инструмента на талевой системе, вместе с которой начинают подниматься все детали устройства, кроме запорного тела 1,
5 до того момента, когда оно коснется поверхности конуса опорной секции 2. С этого момента начинается перекатывание запорного тела 1 в пространстве между трубой 24 и конической поверхностью опорной секции 2, при этом возникает радиальное усилие на
0 трубу (че.м больше усилие на крюке талевой системы, тем больще это заклинивающее радиальное усилие). После центрирования трубы относительно колонны труб, спущенных в скважину, производится ее приспускание и свинчивание с предыдущей трубой, при
5 этом труба авто.матически освобождается от фиксации, но запорное тело 1 остается на трубе 24 и может перемещаться только вниз, т. е. п.ри вращении трубы 24 оно может
врнашаться вместе с трубой 24, не заклинивая ее. Для освобождения устройства рукоятка 22 приводится в горизонтальное положение и поворачивается в противоположную сторону (по часовой стрелке) до упора. Вместе с рукояткой поворачивается обод 21 с кулачковыми профильными прорезями 20, что ведет к перекатыванию по этим прорезям подшипников 19 и к перемещению толкателя 9 вверх. Одновременно перемещается связанная с ним с помощью уируги.х поводков 13 управляющая втулка 15, которая своей кромкой нажимает на запорное тело 1, прижимая его к направляющему выступу 4 кольца 3. Запорное тело растягивается и вталкивается в карман 5 кольца 3. Конечное
иоложение достигается упором друг в друга конических поверхностей а на управляющей втулке 15 и опорных секциях 2. Крайнее положение рукоятки 22 фиксируется уклоном кулачковой ирорези в другую сторону. Теперь запорные тела 1 не препятствуют перемеихению устройства вверх относительно колонны труб, и после снятия его с трубы 24 рычаг 11 автоматически фиксирует толкатель 9 от перемещения.
Благодаря тому, что устройство позволяет управлять ироцессами захвата и освобождения труб, обеспечивается возможность проведения спуско-подъемных операций с трубами при их захвате за гладкую часть.
5|
/4
22
D €
Sj
17 /J-XI
13
13
Сриг.5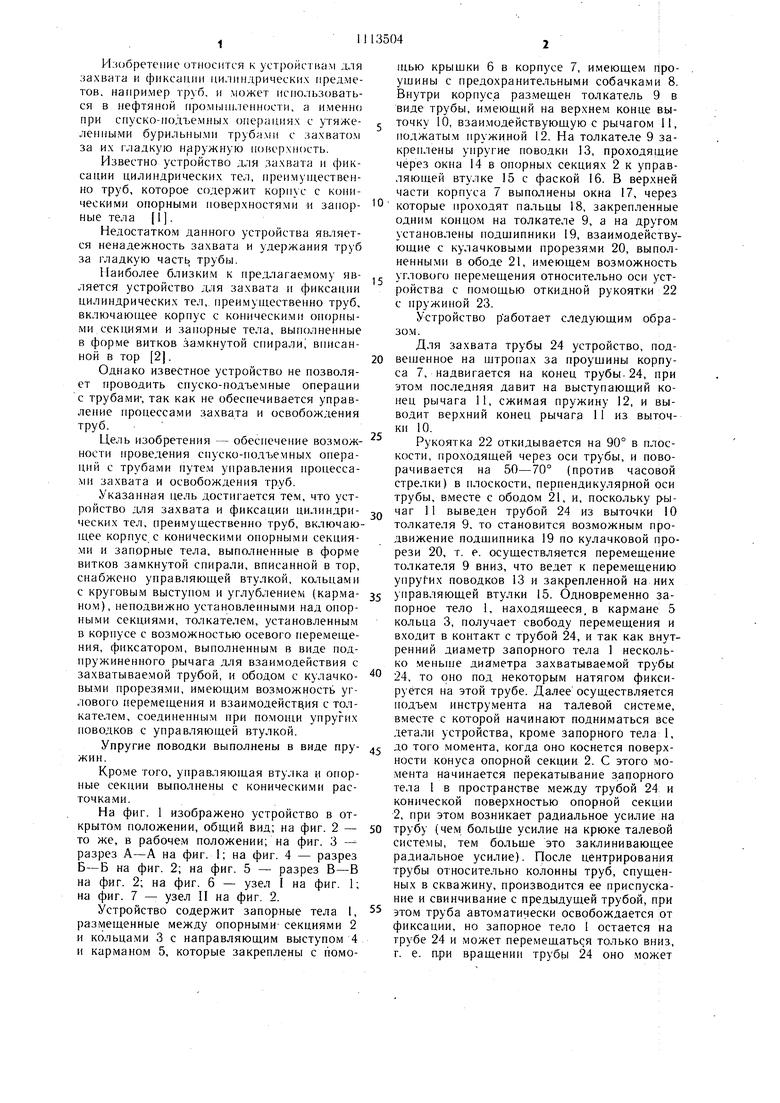
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтоматический элеватор | 1971 |
|
SU717276A1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2018 |
|
RU2761389C1 |
| Устройство для снятия початков и установки шпуль на прядильных машинах | 1948 |
|
SU81854A1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств. | 2019 |
|
RU2720390C1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Сверлильный станок | 1985 |
|
SU1355369A1 |
| РУЧНОЕ УСТРОЙСТВО ДЛЯ ЗУБОВРАЧЕБНОГО ИЛИ ХИРУРГИЧЕСКОГО ИСПОЛЬЗОВАНИЯ | 2005 |
|
RU2361540C2 |
| Рабочий ротор | 1990 |
|
SU1756115A2 |
| Элеватор | 1984 |
|
SU1208172A1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПЕРВОЙ И ВТОРОЙ ЧАСТЕЙ ПОДВОДНОГО СОЕДИНИТЕЛЯ | 1992 |
|
RU2103772C1 |

13 2
иг.1
| I | |||
| СПОСОБ ДИАГНОСТИКИ ГИДРОЦЕФАЛИИ ГОЛОВНОГО МОЗГА | 2006 |
|
RU2301625C1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Водопроводный кран | 1925 |
|
SU1942A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для фиксации и захвата предметов | 1978 |
|
SU781319A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
