00 ел
со
CD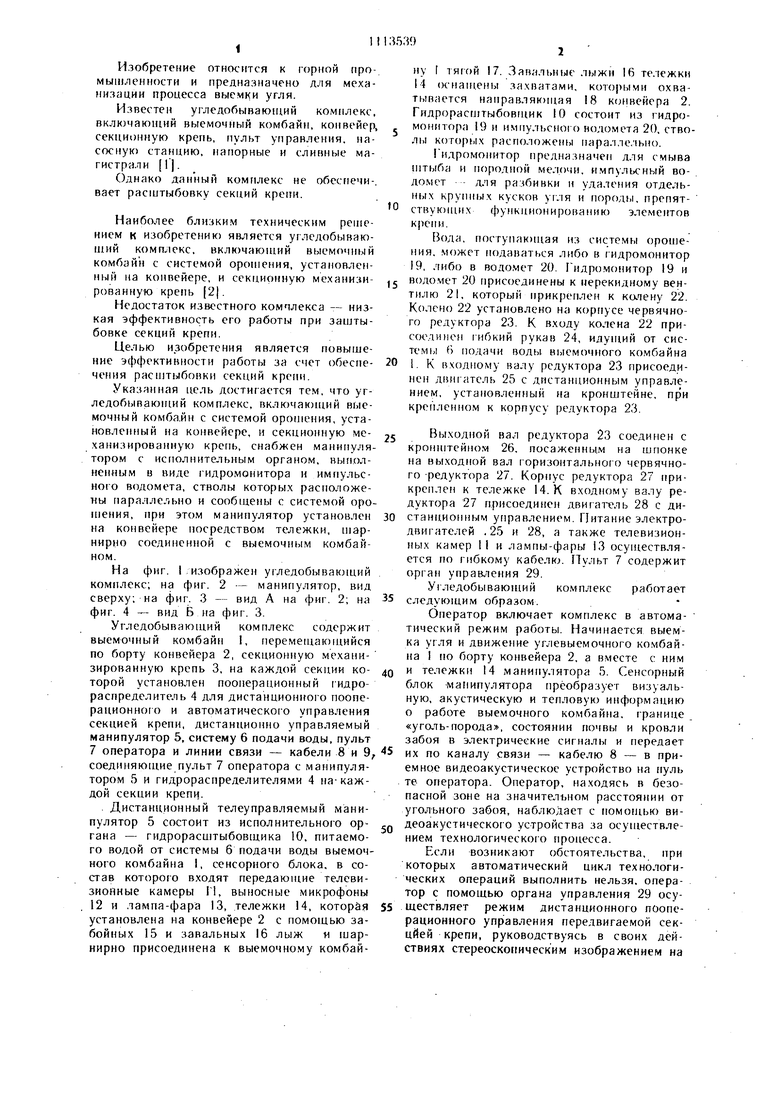
УГЛГ-ДОБЫВАЮЩИЙ КОМПЛЕКС, включающий выемочный комбайн с системой орошения, устанонлеипый на ко41вейере, и секционную механизированную крепь, отличающийся тем, «то, с целью повышения эффективности работы за счет обеспечения расштыбовки секций крепи, он снабжен манипулятором с исполнительным органом, выполненным в виде гидромонитора и импульсного водомета, стволы которых расположены параллельно и сообщены с системой орошения, при этом манипулятор установлен на конвейере посредством тележки, шарннрно соединенной с выемочным комбайном.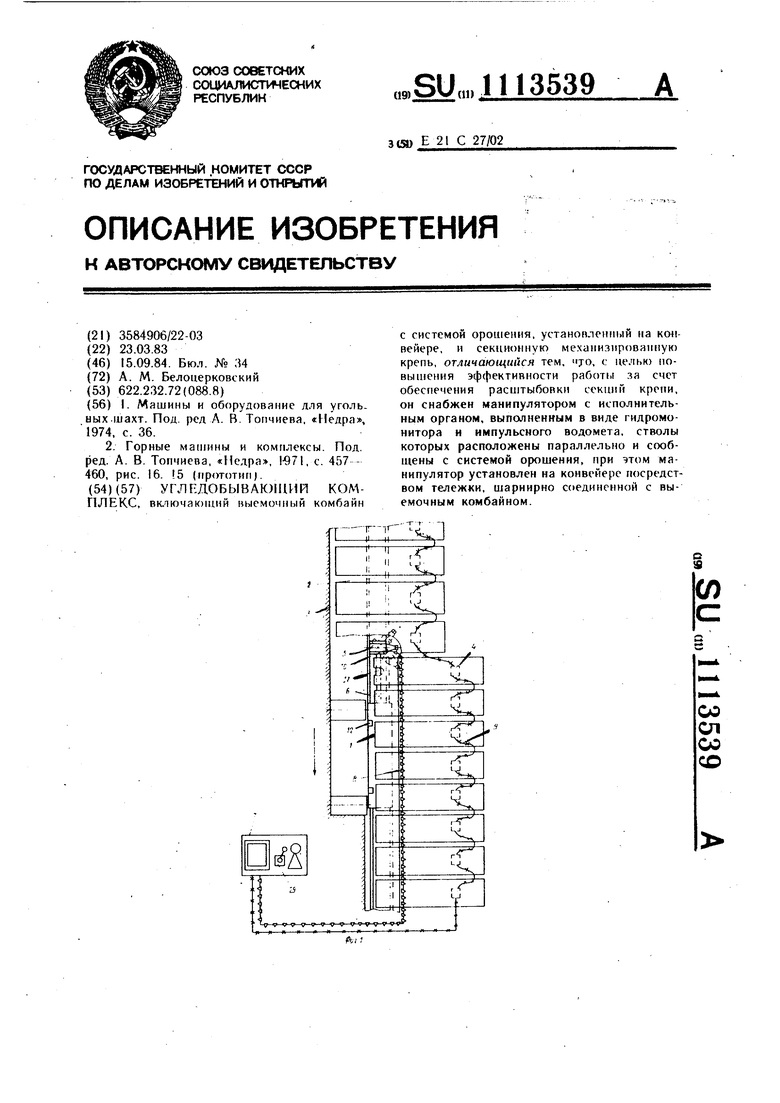
Изобретение OTFIOCMTCH к горной промыпкпенности и предназначено для механизации процесса выемки угля.
Известен угледобывающий , включающий выемочный комбайн, конвейер, секционную крепь, пульт управления, насосную станцию, напорные и сливные магистрали 1|.
Однако данный комплекс не обеспечивает расштыбовку секций крепн.
Наиболее близким техническим решением к изобретению яв тяется угледобывающий комплекс, включающий выемочный комбайн с системой оро1нения, установленный на конвейере, и секционную механизированную крепь 2|.
Недостаток известного комплекса - низкая эффективность его работы при заштыбовке секций крепи.
Целью изобретения является повышение эффектив юсти работы за счет обеспечения расштыбовки секций крени.
Указанная цель достигается тем, что угледобывающий комплекс, включающий выемочный комба.йн с системой оро цения, установленный на конвейере, и секционную ме.xatiH3HpoBaHHyK) крепь, снабжен манипулятором с исполнительным органом, выполненным в виде гидромонитора и импульсного водомета, стволы которых расположены параллельно и сообщены с системой орошения, при этом манипулятор установлен на конвейере посредством тележки, 1нарнирно соединенной с выемочным комбайном.
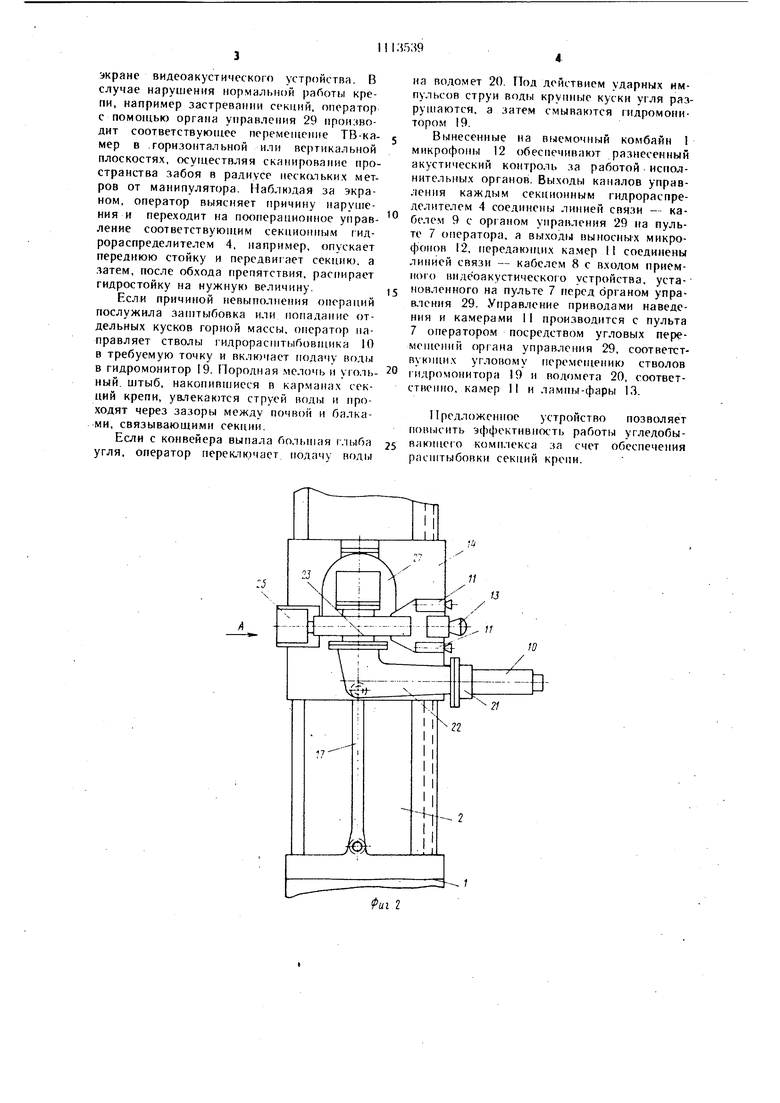
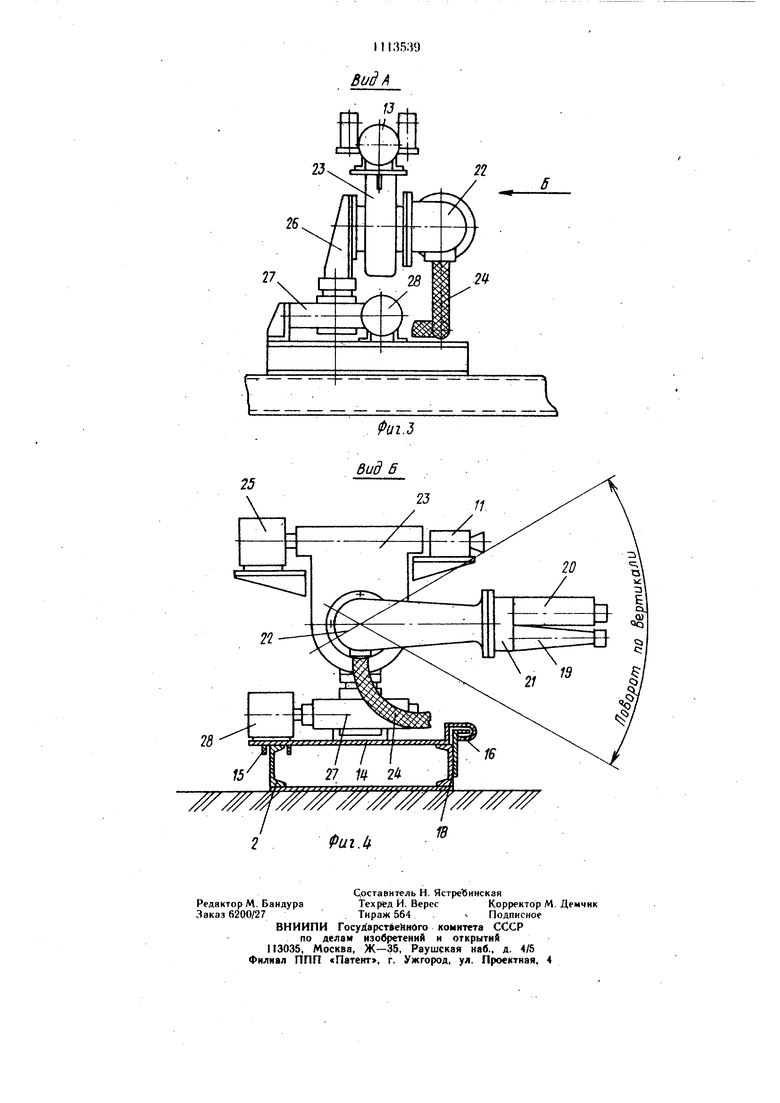
На фиг. I изображен угледобывающий комплекс; на фиг. 2 - манипулятор, вид сверху; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 3.
Угледобывающий комплекс содержит выемочный комбайн I, перемешаю цийся по борту конвейера 2, секционную механизированную крепь 3, на каждой секции которой установлен пооперационный гидрораспределитель 4 для дистанционного пооперационного и автоматического управления секцией крепи, дистанционно управляемый манипулятор 5, систему 6 подачи воды, пульт 7 оператора и линии связи - кабели 8 и 9 соединяющие пульт 7 оператора с манипулятором 5 и гидрораспределителями 4 на-каждой секции крепи.
Дистанционный телеуправляемый манипулятор 5 состоит из исполнительного органа - гидрорасштыбовщика 10, питаемого водой от системы 6 подачи воды выемочного комбайна I, сенсорного блока, в состав которого входят передающие телевизионные камеры Г1, выносные микрофоны 12 и лампа-фара 13, тележки 14, которйя установлена на конвейере 2 с помощью забойных 15 и завальных 16 лыж и шарнирно присоединена к выемочному комбайну I тягой 17. Завальные лыжи 16 тележки 14 оснан1ены захватами, которыми охватывается нанравляюшая 18 к(Л|вейера 2. Гидрорасштыбовщик К) состоит из гидромонитора 19 и импульсного водомета 20, стволы которых расположены параллельно.
Гидромонитор предназначен для смыва штыба и породной мелочи, импульсный водомет - для разбивки и удаления отдельных крупных кусков угля и породы, препятствующих функционироЕ(аник) элементов крепи.
Вода, поступающая из системы орошения, может подаваться либо в гндромонитор 19, либо в водомет 20. Гидро.монитор 19 и водомет 20 присоединены к перекидному вентилю 21, который npHKperunetf к ко,лену 22. Колено 22 установлено на корпусе червячного редуктора 23. К входу колена 22 присое..1И)1ен гибкий рукав 24, идущий от системы 6 подачи воды выемочного комбайна 1. К входному валу редуктора 23 присоединен двигатель 25 с дистанционным управлением, установленный на кронштейне, при крепленном к корпусу редуктора 23.
Выходной вал редуктора 23 соединен с кронштейном 26, посаженным на шпонке на выходной вал горизонтального червячного -редуктора 27. Корпус редуктора 27 прикреплен к тележке 14. К входному валу редуктора 27 присоединен двигатель 28 с дистанционным управлением. Питание электродвигателей . 25 и 28, а также телевизионных камер II и лампы-фары 13 осуществляется по гибкому кабелю. Пульт 7 содержит орган управ,1ения 29.
Угледобывающий комплекс работает следующим образом.
Оператор включает комплекс в автоматический режим работы. Начинается выемка угля и движение углевыемочного комбайна 1 но борту конвейера 2, а вместе с ним и тележки 14 манипулятора 5. Сенсорный блок -манипулятора преобразует визуальную, акустическую и тепловую информацию о работе вые.мочного комбайна, границе «уголь-порода, состоянии почвы и кровли забоя в электрические сигналы и передает их по каналу связи - кабелю 8 - в приемное видеоакустическое устройство на пуль те оператора. Оператор, находясь в безопасной зоне на значительном расстоянии от угольного забоя, наблюдает с помощью видеоакустического устройства за осуществлением технологического процесса.
Если возникают обстоятельства, при которых автоматический цикл технологических операций выполнить нельзя, оператор с помощью органа управления 29 осуществляет режим дистанционного пооперационного управления передвигаемой секцией крепи, руководствуясь в своих действиях стереоскопическим изображением на
экране видеоакустического устройства. В случае нарушения нормальной ра(1оты крепи, например застревании секций, оператор с помощью органа унравления 29 производит соответствующее перемен1ен11е ТВ-камер в .горизонтальной или вертикальной плоскостях, осуществляя сканирование пространства забоя в радиусе нескатьки.ч метров от манипулятора. Наблюдая за экраном, оператор выясняет причину Hapyuieния и пере.ходит на пооперационное управление соответствуюпшм секпионным гидрораспределителем 4, например, опускает переднюю стойку и передви1ает секцию, а ., после обхода препятствия, pacfMipaeT гидростойку на нужную величину.
Если причиной невыполнения операций послужила заштыбовка или попадание отдельных кусков горной массы, оператор направляет стволы гидрорасц|ТыГ)овп1ика 10 в требуемую точку и включает подачу воды в гидромонитор 19. Породная мелочь и угольный, штыб, накопившиеся в карманах секций крепи, увлекаются струей поды и проходят через зазоры между почвой и балками, связывающими секции.
Если с конвейера выпала больн1ая глыба угля, оператор переключает подачу поды
на водомет 20. Под действием ударных импульсов струи воды крупные куски угля разрушаются, а затем смываются гидромонитором 19.
Вынесенные на выемочный комбайн 1 микрофоны 12 обеспечивают разнесенный акустический контроль за работой исполнительных органов. Выходы каналов управления каждым секционным гидрораспределителем 4 соединены линией связи - кабелем 9 с органом управления 29 на пульте 7 оператора, а выходы выносных микрофонов 12, предающих камер II соединены линией связи - кабелем 8 с входом приемного вндсоакустическою устройства, установленного на пульте 7 перед Органом управления 29. Управление приводами наведения и камерами II производится с пульта 7 оператором посредством угловых перемещеннй органа управления 29, соответствующих угловому Г1еремеп1ению стволов
гидромонитора 19 и водомета 20, соответственно, камер II и лампьг-фары 13.
Предложенное устройство позволяет повысить эффективность работы угледобывающего комплекса за счет обеспечения расщтыбовки секций кропи.
| I | |||
| Машины и оборудование для угольных.шахт | |||
| Под | |||
| рел А | |||
| В | |||
| Топчиева, «Недра, 1974, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Горные машины и комплексы | |||
| Под | |||
| ред | |||
| А | |||
| В | |||
| Топчиева, «Недра, 1-971, с | |||
| Прибор для вычерчивания конических сечений | 1922 |
|
SU457A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
