1
Изобретение относится к электротехнике в может быть использовано в регулируемом электроприводе с асинхронным короткоаамкнутым двигателем, в котором требуется широкий диапйаон регулирования рабочих скоростей.
Известны электроприводы с асинхронными двигателями, содержащие преобразователь частоты, датчика Холла, координатные преобраз(атепи. и регуляторы скорости и магнитного потока 1.
Однако в этих приводах отсутствует работы с автоматическим регулированием скорости за счет ослабления
НОЛЯ;.
Наиболее близким к предлагаемому по технической сущности является электрет привод с асинхронным двигателем, соде жаший-преббразоватепь частоты, датчики Холпа, регуляторы фазных токов, скорости к потока, блок деления в канале регулирования скорости, блоки преобразования координат, формирователь опорных сигналсж и датчик скорости. Регулирсвание скорости в широком диапазоне происходит за счет автоматического изменения величины магнитного потока .
Недоста-йсом этого электропривода является сложность конструкшга, связанная с применением датчике Холла в качест. ве датчиков потока. .
Цель изобретения - упрощение ск&лы и конструкции электропривода.
Указанная цель достигается тем, что электропривод снабжен формиршателшл частоты токов статора, составленньм из сумматора и второго блока деления, входы которого подсоединены к выходам первого блока деления, и датчиком потокосдепления ротона, вход которого подключен к выходу регулятора потокосцепления ротора, при этом входы сумматора связаны с выходами второго блока деления и датчика скорости, а выход сумматора соединен со входом формирсюателя опорных ситч валов и задатчика потокосцепления ротора.
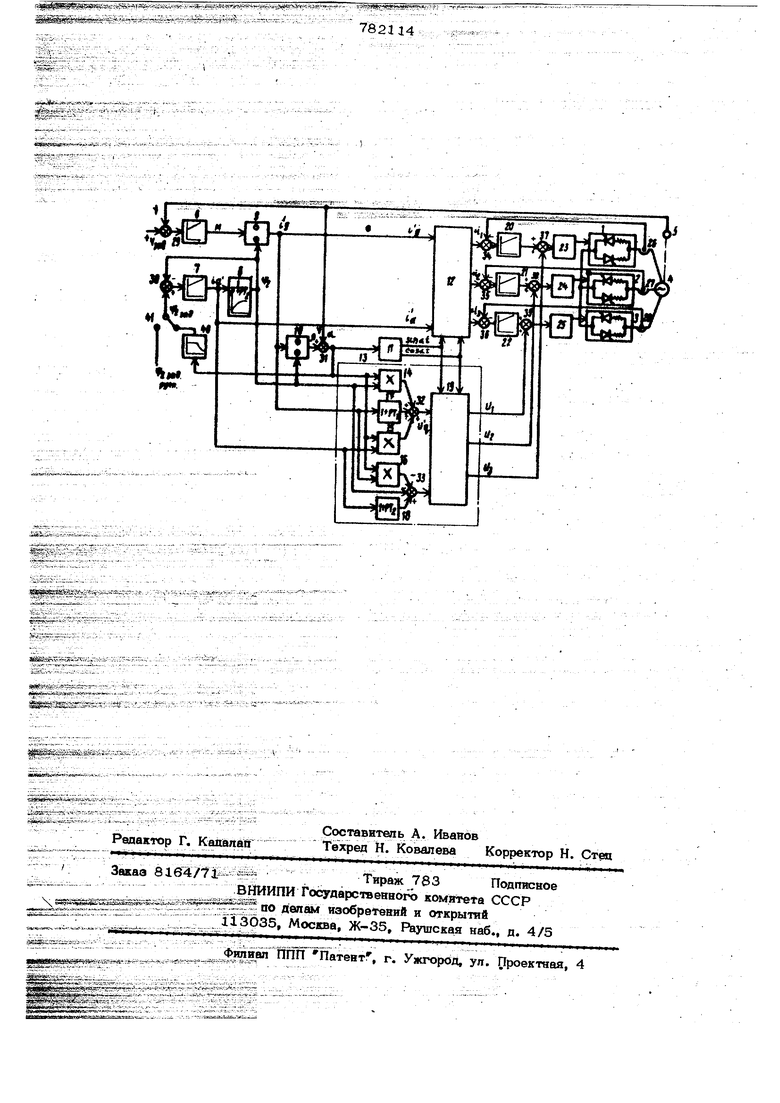
Кроме того, в электроприводе приме- . нен датчик фазных напряжений, составлен37ный из дополнительного блока преобразования координат, двух сумматоров, трех блоков умножения и двух пропорционально-дифференпнрующих звеньев. На чертеже представлена блок-схема .электропривода. Непосредств«1ный преобразователь частоты в эпектропривояе составлен из трех блоков 1-3, выходы которых подключены к обмоткам асинхронного дв гателя 4. На валу двигателя ус тане леи датчик 5 скорости, выход которого связан со входом регулятора 6 скорости. Выход регулятора 7 потокосдепления ротора подключи через апериодическое звено - датчик 8 потокосиеплшия ротора к первому блоку 9 деления, выход которого подключен ко входу делимого второго блока Ю деления. Выход этого бло ка деления связан с формирователи 11 опорных сигналов, выходы которого ITOZJключены к соответствующим входам блока 12 прямого преобразования координат Датчик 13 фазных напряжений U Uft и U-: роставлен из трех блоков 14-16 умножения, двух пропорционально дифференцирующих зв«1ьев 17 и 18 и дополнительного блока 19 прямого преобразования координат. Выходы блока 12 связаны со входами блоков 1-3 через регуляторы 2О-22 фазных токов и блоки 23-25 фазоимпуль ного управления. Входы регуляторов 2022 связаны с выходами датчике 2628 -фазных токов. Преобразователь содержит также узлы 2&-39 суммирования. Блок 4О является задатчиком потокосиепления ротора Ц , которое может поступать и по шине 41 от блока ручного задания. Электропривод работает следующим образом. На входе регулятора скорости 6 в сумматоре 29 сравниваются сигнал задания скорости с сигналом измеренной датчиком 5 скорости . Выходной сигнал регулятора 6 является сигнале задания вращйюшегося момента дви i;ta:SJ..«-;i;:-- , гателя 4. На входе регулятора 7 с помощью узла ЗО суммирования сравнивается сигнал задания потокосцепла1ия ротора Чо. с сигналом на выходе датчика 8 потокоспепления. При двухфазном регулировании скорости величина сигнала от блока 40 остается неизменной в диапазо не выходных частот преобразсязатёля, в котором с уйелпчением частоты увелнчивается выходное напряжение преобразова теля. При достижении выходным напряже 44 ппем преобразователя 1-3 максимального значения величина сигнала задания потокосиепления ой начинает изменяться обратно пропорционально дальнейшему приращению частоты. Выходной сигнал регулятора 7 является заданием тока возбуждения (тока на магничивания) 1. . Датчик 8 потокосдепления имитирует изменение hOTOKOcцепления ротора во времени при изменении тока возбуждения -i с учетом нетгаейной зависимости ф от -fj . На выходе блока 9 деления формируется сигнал аадания активной составляющей тока статора. На выходе блока 1О деления формируется сигнал JEi частоты токов ротора, который суммируется в узле 31 сз ммирования с сигналом Л) частоты вращй1ия ротора двигателя 4. На выходе узла 31 суммирования формируется сигнал э1 частоты токов статора, который в фо жтирс аателе 11 опорных сигнале преобразуется в опорные сигналы S И oLt и CDS.t, которые поступают в блоки 12 я 19 преобразователя координат. На другие входы блока 12 преобразователя координат поступают сигнатты 1 л и /л . В блоке 12 преобразования координат формируются сигналы задания фазных токов П , 2. и i-t , которые через регуляторы 2О-22 фазных токов и блоки 23-25 фазсжмпупьсного управления воздействуют на входы преобразователей 1 3 и питают асинхронный двигатель 4 токами, вследствие чего возникает момент на валу, строящийся поддержать скорость V , равной скорости VIQ. Чтобы форма и фаза токею статора двигателя соот ветстворала заданной в возможно более широком диапазоне частот, в датчике 13 фазных напряжений формируются сигналы задания фазных напряжений J , (j и Ua I которые поступают на входы блоков 1-3 через узлы 37-39 суммирования. В датчике 13 фазных напряжений с помощью блоков 14-16 умножения, пропорционально-дифференцирующих звеньев 17 и 18 и узлов 32 и 33 суммирования сначала формируются сигналь (J и llg- сигналы задания напряжения во вращающейся системе координат, которые с помощью блока 19 преобразуются в требуемые дигнапы задания фазных напряжений. Постоянные времени Т я Т определяются параметрами статорной и роторной цепей двигателя 4. Предлагаемый электропривод имеет более простую и конструкцию, так
как по сравнению с иавейтными в нем не применяются датчики Холле, разметаемые в Bo oyiuHOM зазоре двигатепя.
Формула изобрете1ния
1.Эпектропривод, содержащий асинхроный короткозамкнутый электродвигатель, преобразователь частоты, входы которого связаны с выходами регуляторов фазных токов, а выходы - с фазами статорных обмоток асинхронного короткозамкнутого электродвигателя, датчик и регулятор скорости, выход которого овязан черев первый блок деления с первым входом блока прямого преобразования координат, второй вход которого связан с выходом регулятора потокосцеппения рбтора, входы которого подключены к выходам задатчика и датчика потокосцепления ротора, формирователь опорных сигналов, выходы которого подключены к соответс/тующим входам блока прямого преобрасижания координат, отличающийся тем, что, с целью упрощения, он снабжен формирователем частоты токов статора, составленным из сумматора и второго блока деления, вход делимого которого соединен с выходом первого блока деления, а вход делителя соединен с выходе датчика потокосцепления ротора, вход которого подключен к выходу регулятора потокосцепления ротора, при этом входы сумматора подключены к выходам второго блока деления и датчика скорости, а его выход соединен со входом формирователя опорных сигналов и эадатчика потокосиепле- ния.
2,Эпектропривод по п. 1, о т л и чающийся тем, что снабжен да-рчиком фазных напряжений, составленным
из дополнительного блока прямого преобразования координат, первого и второго сумматоров, , второго и третьего блоков умножения и первого и второго пропорционально-дифференцирующих звеньев, выхоры которых подключены соответственно ко входам первого и второго сумматорда, при этом входы допопянтепьного блока прямого преобразования координат подключены к выходам формирователя опорных сигнале, пе(юые входы все блоков умножения JIOдkлючeны к выходу формирователя частоты токов статора,второй вход пе(юого блока умнож ения соединен со входом второго сумматора и подключен к выходу датчика потокосцепления ротора, второй вход второго блока умножения соединен со входом второго пропорционально-дифференцирующего звена и подключен к выходу регулятора потокосцепления ротора, второй третьего блока умножения соединен со входом первого пропорционально-ди(} ференцирующего звена и подключен к выходу первого блока деления, выходы первого и второго блоков умножения подключены ко входам первого сумматора, а выход третьего блока умножения подключен ко входу второго сумматора, причем выходы обоих сумматоров через дополнительный блок прямого преобразования координат связа(1ы со входами преобразователя Частоты.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1941312, кп. 21с, 59/30, 1969.
2.Авторское свидетельство СССР № 2359889, кл. Н 02 р 7/42, 1976;
,,,,,
Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным двигателем | 1978 |
|
SU888316A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для управления асинхронным двигателем | 1976 |
|
SU657559A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Электропривод переменного тока | 1979 |
|
SU828356A1 |
--- - ,: iMtirvV n,.ii-.,
.- J V- - --- - --- Hr
Si,S«u,-.
