В данном устройстве параллельно поверхности воды под заданным углом к основному лучу над судном формируют второй луч с отличающимися модуляционными характеристиками, оба луча направляют параллел эно поверхности воды, определяют расстояние от судна до одного из лучей, измеряют расстояние между лучами на прямой, проходящей через судно, и по измеренным расстояниям определяют положение судна, при этом расстояния измеряют по круговым линиям визирования лучей путем фиксирования рассеянного атмосферой излучения. Работе фотоприемников в данном способе мешает фон. создаваемый внешними источниками излумениямх, в результате чего снижается точность в работе системы ориентации.
Цель изобретения - повышение точности определения местоположения судна.
Поставленная цель достигается тем, что в устройство для определения местоположения судов, содержащее два генератора оптических лучей, установленные на берегу, м два фотоприемника, установленные на судне, & также блок обработки оптического сигнала, дополнительно введены установленные на бзрегу радиопередатчик модул / рованных сигналов и синхронизатор, а также установленные на судне соединенные последовательно радиоприемник, селектор л генератор импульса двух блоков выработки импульса о приеме полезного сигнала, каждый из которых выполнен из схемы ИЛИ, блока задержки, интегратора, ключа, двух запоминающих устройств, интегратора, дифференциального усилителя, порогового устройства и сумматора, причем выход генератора импульса подключен соответственно к входам двух блоков задержки, схем ИЛИ и к входам первого запоминающего устройства, при этом выход блока задержки подключен к второму входу блока ИЛИ и к первому входу второго запоминающего устройства, выход схемы ИЛИ подключен к входу фотоприемника и к первому входу ключа, выход фотоприемника подключен к интегратору, выход которого подключен к второму входу ключа, к вторым входам двух запоминающих устройств, выходы которых подключены к дифференциальному усилителю, выход его - к первому входу сумматора, второй вход которого подключен к выходу порогового устройства выход сумматора подключен к входу порогового устройства, выходы сигнализаторл подключены соответственно к генераторам лучей и радиопередатчику.
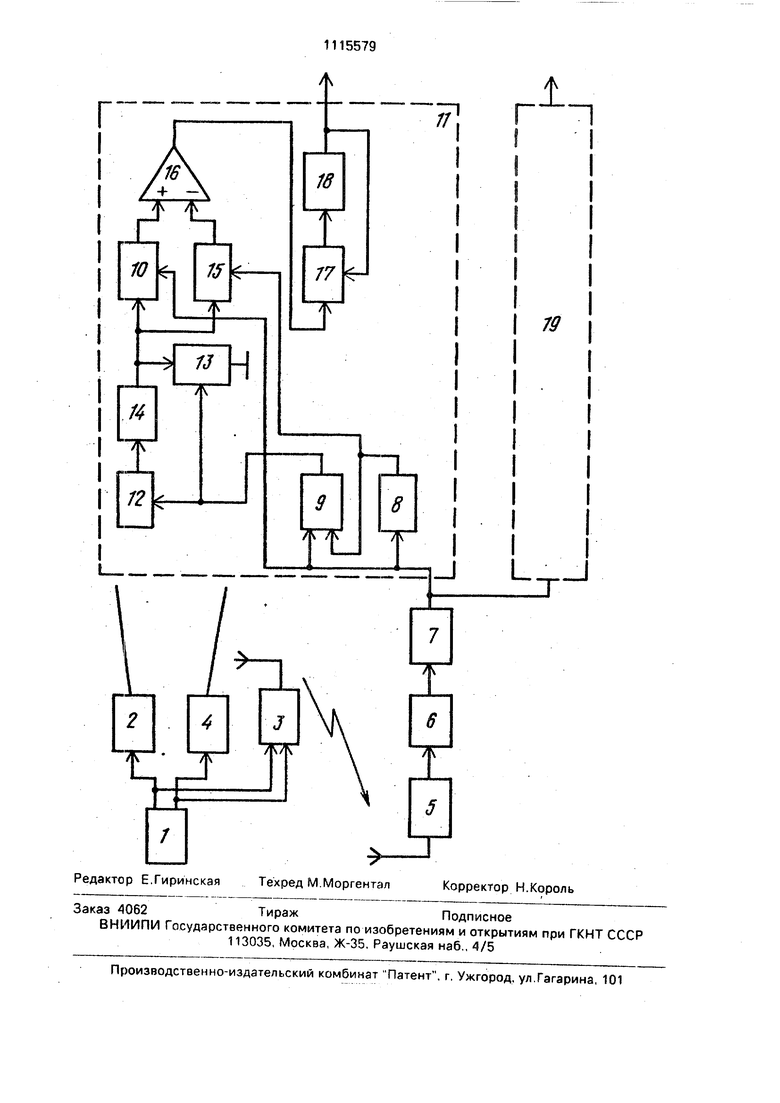
На чертеже приведено предлагаемое устройство для определения местоположения судов.
Устройство содержит синхронизатор 1,
первый выход которого соединен с входом генератора 2 первого луча, входом радиопередатчика 3, а второй выход - с входом генератор 4 второго луча. Выход радиоприемника 5 сообщен с входом селектора б,
0 выход которого соединен с входом генератора 7 импульса. Выход последнего сообщен с входом блока 8 задержки, входом схемы ИЛИ 9 и управляющим входом первого запоминающего устройства 10 фотоприЬ емника 11. Выход схемы ИЛИ 9 соединен с управляющим входом чувствительного элемента 12 и управляющим входом ключа 13. Выход чувствительного элемента 12 соединен с входом интегратора 14, выход которо0 го сообщен с входом ключа 13, входом первого запоминающего устройства 10 и входом второго запоминающего устройства 15. Выходы устройств 10 и 15 соединены с входами дифференциального усилителя 16,
5 выход которого соединен с входом сумматора 17. Выход последнего сообщен с входом порогового устройства 18, причем выход порогового устройства 18 соединен с входом сброс сумматора 17.
0Аналогично соединен генератор 7 импульса с фотоприемником 19.
Устройство работает следующим образом.
Синхронизатор 1 выдает поочередно
5 импульсы запуска генераторов 2 и 4 первого и второго луча. Импульсы запуска генераторов 2 и 4 не перекрываются во времени. Это время равно сумме удвоенного времени, когда открыт оптический приемник, и вре0 менного прО;Межутка интервалом, когда определяется энергия сигнала .и фона, и интервалом, когда определяется энергия фона. Они имеют разную длительность, осуществляют амплитудомодуляцию рэдиопе5 редатчика 3, что позволяет селективно принимать рассеянный атмосферой сигнал от первого или второго лучей.
Радиоприемник 5 выделяет эти импульсы и выдает на селектор б, который выделя0 ет радиоимпульсы, совпадающие с моментом излучения в атмосферу генератором 2 или 4 первого или второго луча. Например, селектор 6 выделяет радиоимпульс, совпадающий с моментом излучения гене5 ратора 2, который запускает генератор 7 импульса, формующий импульс длительности
-1 (cosg-1 H-tgq)
ОПТ.И I
где I - длина зоны ориентирования;
. сг - угол между лучами;
с - скорость света;
1опт.и длительность оптического импульсного сигнала, который через схему ИЛИ 9 поступает на чувствительный элемент 12 и открывает его.
Радиосигнал будет совпадать или опережать рассеянное атмосферой излучение, вследствие распространения оптического сигнала по ломаной траектории, поэтому время г выбрано таким, чтобы открывающийимпульс на чувствительном элементе перекрывался во времени с сигналом рассеянного атмосферой излучения первого луча при нахождении судна во всем-секторе ориентирования. За время действия импульса на выходе генератора 7 импульса интегратор 14 интегрирует сигнал с выхода чувствительного элемента 12 и выдает на первое запоминающее устройство 10. Величина сигнала на выходе устройства 10 равна сумме энергии фона и энергии рассеянного атмосферой излучения.
По окончании этого импульса ключ осуществляет сброс интегратора 14. Через время, определяемое блоком задержки, которое выбрано больше г, на выходе блока задержки появляется импульс, который через схему ИЛИ 9 открывает чувствительный элемент, а также поступает на управляющий вход второго запоминающего устройства 15, которое запоминает сигнал на выходе интегратора 14. Величина этого сигналл равна энергии фона. Сигналы с первого 10 и второго 15 запоминающих устройств по ступают на дифференциальный усилитель 16. с выхода которого сигнал, пропорциональный разности первого и второго измерений, поступает на сумматор 17. Так при поступлении достаточного количества импульсов на выходе сумматора 17 снижается влияние переменной составляющей фона пропорционально N, N - число импульсов, поступающих на сумматор. При превышении величины сигнала на выходе сумматора 17 некоторой пороговой величины пороговое устройство 18 осуществляет сброс сумматора 17 и выдает импульс, сигнализирующий о приеме полезного сигнала.
Преимуществом изобретения является повышение точности системы ориентирования путем повышения точности выделения полезного сигнала. Кроме того, в предлагаемом устройстве по сравнению с известным увеличена точность ориентирования путем сужения зоны электромагнитного излучения, а также есть возможность определять в количественном выражении отклонение от заданной траектории и задать движение по сложной траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| SOS-СИСТЕМА ДЛЯ АВТОМАГИСТРАЛЕЙ | 2010 |
|
RU2434299C1 |
| Тахогенератор вентильного электродвигателя | 1981 |
|
SU966597A1 |
| Устройство для проводки судов | 1983 |
|
SU1230417A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ОБЪЕКТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078360C1 |
| Устройство для передачи и приема дискретной информации по оптическому каналу с импульсно-кодовой модуляцией | 1983 |
|
SU1218904A1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2020590C1 |
| Устройство для моделирования зондирования рельефа дна гидролокатором и эхолотом | 1983 |
|
SU1138810A1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| Устройство для приема избыточной информации | 1983 |
|
SU1107146A1 |
| Радиометр | 1990 |
|
SU1723460A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ, содержащее .два генератора оптических лучей, установленные -на берегу, и два фотоприемника, установленные на судне,а также блок обработки оптического сигнала, отличающееся тем, что, с целью повышения точности определения местоположения судна, в него дополнительно введены установленные на берегу радиопередатчик модулированных сигналов и синхронизатор, а также установленные на судне соединенные последовательно радиоприемник, селектор и генератор импульса двух блоков Изобретение относится к навигации и применяется главным образом при определении положения морских судов. Известно устройство ориентирования с применением стартового радиомаяка. Действие этих радиомаяков основано на принципе равносигнальной зоны, создаваемой системой двух антенн во время работы створного маяка, передаются переплетающиеся сигналы, посылаемые таким образом, что при прохождении судна на створе будут слышны оба сигнала с одинаковой сивыработки импульса о приеме полезного сигнала, каждый из которых выполнен из схемы ИЛИ, блока задержки, интегратора, ключа, двух запоминающих устройств, интегратора, дифференциального усилителя, порогового устройства и сумматора, причем выход генератора импульса подключен соответственно к входам двух блоков задержки, схем. ИЛИ и к входам первого запоминающего устройства, при этом выход блока задержки подключен к второму входу блока ИЛИ и к первому входу второго запоминающего устройства, выход схемы ИЛИ подключен к входу фотоприемника и к первому входу ключа выход фотоприемника подключен к интегратору, выход которого подключен к второму входу ключа, к вторым входам двух запоминающих устройств, высл ходы которых подключены к дифференцис альному усилителю, выход его - к первому входу сумматора, второй вход которого подключен к выходу порогового устройства, выходы сигнализатора подключены соответственно к генераторам лучей и радиопередатчику. сл СП ю лой. Так как паузы одного сигнала заполняются другим, то создается впечатление непрерывного звука - длинное тире. При выходе из равносигнальной зоны будут слышны с большой силой определенные сигналы, в зависимости от стороны уклонения от створа. Наиболее близким к данному изобретению является устройство для определения местоположения судов, сод1 ржащее два генератора оптических лучей, установленные на берегу, и два фотоприемника, установленные на судне, а также блок обработки оптического сигнала.
| Баранов Ю.И., Лесков М.М., Ющенко А.П | |||
| Современные способы навигации | |||
| Морской транспорт, 1956, с | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Авторское свидетельство СССР № 683303, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
