Изобретение относится к сельскому хояйству, а именно к животноводству, и моет найти применение на молочных фермах высокоудойным стадом.
Цель изобретения - расширение функцинальных возможностей устройства путем беспечения диагностики физиологически слабленных животных.
Каждому животному выдают нормиро- еанйую порцию корма, определяют величину несъеденной части порции корма, пределяют отношение несведённой части порции к величине выданной порции корма, задают требуемое значение, а физио- логическое состояние каждого животного оценивают как Требующее™ пЪвышенного внимания при превышении значением указанного отношения требуемой величины, выбранной с учетом технологических требований и точности раздачи выбранного для использования оборудования.
Если фактор превышения текущей величиной требуемого значения вычисляемого параметра повторяется для данного скотоместа трижды, то это свидетельствует о нарушениях технического состояния применяемого кормоприготовительного и кормораздаточного оборудования.
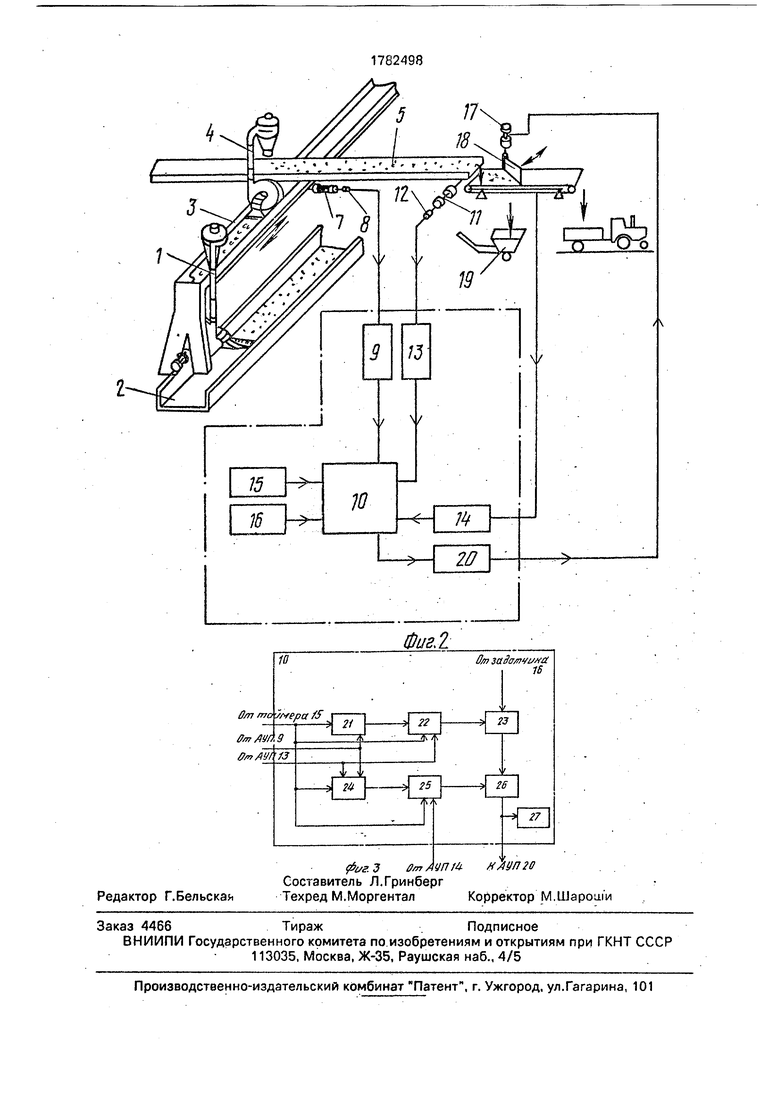
На фиг.1 изображена схема предлагаемого устройства; на фиг,2 - то же, с напра- вителем потока; на фиг.З - схема вычислительно-индикационного блока.
Устройство включает пневмоперегру- жатель 1, подающий остатки недоеденного корма с кормораздаточного транспортера 2 на ленточный перегружающий транспортер 3, на конце которого и укреплен пневмопе- регружатель 1. Остатки недоеденного корма с перегружающего транспортера 3 пневмоперегружателем 4 подаются на стационарно установленный ленточный перегружающий транспортер 5, а он передает собранный корм на взвешивающий транспортер 6 блока измерения остатков корма на кормораздаточном транспортере 2. Перегружающий транспортер 3 снабжен приводом 7 и датчиком 8 скорости перемещения ленты транспортера 3-, выход которого через аналого-цифровой преобразователь (АЦП) 9
связан с первым входом вычислительно-индикационного блока 10: Перегружающий ленточный транспортер 5 снабжен приводом 11 и датчиком 12 скорости перемещения ленты транспортера, который через
АЦП 13 связан с вторым входом блока 10. Третий вход блока 10 связан через АЦП 14с выходом узла взвешивания транспортера 6. Четвертый вход блока 10 связан с выходом таймера 15, а пятый вход- с выходом задатчика 16 веса и места расположения порции корма на кормораздаточном транспортере 2, в качестве которого используется блок памяти.
Для повышения точности диагностики
технического состояния системы раздачи концентрированных кормов блок измерения остатков концентрированного корма по длине кормораздаточного транспортера оснащен имеющим привод 17 направителем 18
потока остатков концентрированного корма, направляющим поток остатков корма в бункер 19 для сбора остатков, а система управления, включающая аналого-цифровые преобразователи 9, 13, 14, вычислительноиндикационный блок 10, таймер 15 и задат- чик 16 веса и места расположения порции корма на кормораздаточном транспортере 2, снабжена дополнительным аналого-цифровым преобразователем 20, через который
вход управления привода 17 направителя 18 связан с соответствующим входом вычислительно-индикационного блока.
Вычислительно-индикационный блок включает элементы 21-25 вычисления, элемент 26 сравнения и элемент 27 оповещения.
Устройство работает следующим образом.
После того как корм выдан животным на
кормораздаточный транспортер 2 в соответствии с той информацией, которая заложена в задатчике 16, т.е. после выдачи каждому животному положенной ему порции корма, животные выданный корм съедают. По прошествии заданного времени, выделяемого животным для поедания корма, в действие вступает механизм сбора остатков корма с транспортера 2. Пневмоперегружатель 1 перемещается вдоль кормораздаточного транспортера 2 вместе с ленточным перегружающим транспортером 3 и перемещает остатки корма с ленты транспортера 2 на ленту перегружающего транспортера 3 пропорционально их количеству на транспортере 2. Далее Пневмоперегружатель 4 перемещает остатки корма с ленты перегружающего транспортера 3 на ленточный транспортер 5, также пропорционально их расположению на транспортере 3. Сленточ- ного транспортера 5 собранные остатки корма поступают на взвешивающий транспортер 6, а с него - на переработку или в бункер 19 для сбора остатков.
Данные о скорости перемещения пнев- моперегружателя 1 и ленты транспортера 3 через датчик 8 и АЦП 9 попадают в вычислительно-индикационный блок 10 системы управления, куда также поступают данные о перемещении ленты транспортера 5 от датчика 12, данные о текущем весе остатков порции на транспортере 6 (через АЦП 14), данные от таймера 15 и задатчика 16 веса и места расположение порции корма на кормораздаточном транспортере 2.
В блоке 10 данные от АЦП 9, т.е. информация о скорости перемещения ленты транспортера 3, вместе с данными от таймера 15 (т.е. данными о времени) поступают в элемент 21 вычисления, который определяет функцию, описывающую от какого места кормораздаточного транспортера 2 в какой момент времени остатки приходят на ленточный транспортер 5.
Данные от элемента 21, вычисления, характеризующие, от какого кормового места в какой момент времени остатки поступают на ленточный транспортер 5, а также данные от АЦП 13, т.е. сигнал о скорости ленточного транспортера 5, вместе с данными от таймера 15 (т.е. данными о времени) поступают в элемент 22 вычисления, который и определяют функцию, описывающую, от какого кормового места остатки поступают в каждый момент времени на взвешивающий транспортер 6.
Данные о том, с какого места в данный момент времени остатки поступают на взвешивающий транспортер 6 (данные от элемента 22), вместе с данными от задатчика 16 (сколько корма выдано на каждое место) поступают в элемент 23 вычисления, который и определяет, остатки от какого количества кормов поступают сейчас, в данный момент времени, на взвешивающий транспортер 6. 5Данные от АЦП 9 и 13 вместе с данными
от таймера 15 поступают в элемент 24 вычисления, который определяет, на сколько сжаты остатки, поступающие на взвешивающий транспортер 6 в каждый момент
0 времени, т.е. на какую длину на транспортере 6 укладывается то, что было собрано с единицы длины кормораздаточного транспортера 2.
Данные от АЦП 14, т.е. данные о теку5 щем весе кормов (точнее, их остатков) на взвешивающем транспортере 6, вместе с данными от таймера 15 и данными о коэффициенте сжатия от элемента 24 поступают в элемент 25 вычисления, который по этим
0 данным определяет, какова величина остатков, собранных с некоторого участка кормораздаточного транспортера 2.
Данные от элемента 25, характеризующие вес остатков корма от определенного
5 места, и данные от элемента 23 о количестве корма, выданного на это место, синхронизированные по времени (обе зависимости в элементах 23 и 25 формируются от текущего момента времени), поступают в элемент 26
0 сравнения, который сравнивает их между собой и в случае, если количество остатков превышает заданную величину, дает команду АЦП 20 и элементу 27 оповещения. Таким образом, вычислительно-индикационный
5 блок 10 определяет вес остатков порций корма от каждого скотоместа, сравнивает их с выданной порцией корма, а разность этих величин сравнивает с заданной величиной этого параметра (например, 10%), устанав0 ливаемой исходя из технологических требо- ваний (например, 7%) и технических возможностей выбранного кормораздаточного оборудования, характеризуемых точностью раздачи корма (например, 3%). Если
5 для какого-то скотоместа результаты сравнения превысят допустимый предел, блок 10 сообщит об этом оператору или на центральный пост фермы. Эта информация используется для своевременного диагностирования
0 физиологически ослабленных животных и указывает персоналу фермы, что животное, занимающее это скотоместо, если и не больно, то требует повышенного внимания. Одновременно вычислительно-индика5 ционный блок 10 анализирует и указанное отношение на предмет превышения им несколько меньшего значения, выбранного также с учетом точности раздачи (например, 30%) и технологических возможностей (на- пример, 50%). В том случае, если хотя бы для
одного животного указанная величина превышена, блок 10 запоминает этот факт и следит, не произошли ли аналогичные превышения для двух последующих животных на данном скотоместе. Если превышения произошли, то блок 10 дает сигнал направи- телю 18 через его привод 17 и АЦП 20 и остатки кормов от скотомест в этом случае попадают в бункер 19. Персонал оповещается и о факте сбора остатков в бункере 19, и
0том, от каких скотомест поступили данные остатки, и какова величина превышения. Если для животных, занимающих эти скотоместа, превышено и ранее указанное соотношение (7% плюс максимальное отклонение точности раздачи), то персонал оповещается одновременно об обоих фактах.
В дальнейшем анализ остатков, собранных в бункере 19, позволит установить мес- то сбоя либо по качеству кормов, либо по качеству (точности) кормораздачи. Формула изобретения 1. Устройство автоматизированного контроля системы приготовления и раздачи концентрированных кормов в процессе кормления животных, содержащее снабженный приводом механизм сбора остатков концентрированного корма с кормораздаточного транспортера и систему управления, отличающееся тем, что, с целью расширения функциональных возможностей устройства путем обеспечения диагностики физиологически ослабленых
1животных, оно снабжено блоком измерения остатков концентрированного корма по длине кормораздаточного транспортера, а механизм сбора остатков концентрированного корма с кормораздаточного транспортера выполнен в виде оснащенных приводами, перегружателями и датчиками скорости перемещения п перегружающих транспортеров, каждый из которых сообщен с выходным патрубком соответствующего перегружателя, а входной патрубок последнего сообщен с предыдущим перегружающим транспортером, при этом входной патрубок первого перегружающего транспортера сообщен с кормораздаточным транспортером, причем выход блока измерения остатков концентрированного корма по длине кормораздаточного транспортера связан с первым входом системы
управления, остальные входы которой подключены к выходам датчиков скорости перемещения п перегружающих транспортеров. 2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что система управления включает
таймер, задатчик веса и места расположения порции концентрированного корма на кормораздаточном транспортере, вычислитель-индикационный блок и п+1 аналого- цифровых преобразователей, вход первого
из которых является первым входом системы управления, а остальными входами последнего служат входы аналого-цифровых преобразователей, при этом выходы таймера, п+1 аналого-цифровых преобразователей и задатчика веса и места расположения порции концентрированного корма на кормораздаточном транспортере подключены к соответствующим входам вычислительно- индикаторного блока.
3. Устройство поп пп.1 и 2, о т л и ч а ю- щ е е с я тем, что блок измерения остатков концентрированного корма по длине кормораздаточного транспортера выполнен в виде узла взвешивания.
4. Устройство по пп.1-3, отличающееся тем, что, с целью повышения точности диагностики технического состояния системы раздачи концентрированных кормов, система управления снабжена дополнительным аналого-цифровым преобразователем, вход которого связан с выходом вычислительно-индикационного блока, а выход является выходом системы управления, при этом блок измерения остатков концентрированного корма по длине кормораздаточного транспортера оснащен направителем потока остатков концентрированного корма узла взвешивания и бункером для сбора остатков концентрированного корма после узла взвешивания, при этом вход управления направителя потока соединен с выходом системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматизированного контроля системы приготовления и раздачи кормов | 1990 |
|
SU1832000A1 |
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655407A1 |
| Способ кормления коров | 1990 |
|
SU1790894A1 |
| УСТАНОВКА ДЛЯ РАЗДАЧИ КОРМОВ ЖИВОТНЫМ | 1968 |
|
SU210552A1 |
| Устройство для смешивания и раздачи кормов | 1988 |
|
SU1524861A1 |
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655406A1 |
| Роботизированная станция приготовления смесей для кормления животных | 2023 |
|
RU2818415C1 |
| Устройство индивидуальной раздачи кормов | 1989 |
|
SU1782497A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТЕХНИЧЕСКИ ОПТИМАЛЬНЫМ УГЛОМ НАКЛОНА НЕПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ ДВИЖЕНИЯ ВЗВЕШИВАЕМОЙ И ДОЗИРУЕМОЙ СЫПУЧЕЙ СМЕСИ САМОТЕКОМ ЗА СЧЕТ СИЛЫ ЗЕМНОГО ТЯГОТЕНИЯ ПРИ ПРИГОТОВЛЕНИИ И РАЗДАЧЕ КОРМОВ И КОРМОВЫХ СМЕСЕЙ В ЖИВОТНОВОДСТВЕ И ПТИЦЕВОДСТВЕ | 2014 |
|
RU2597437C2 |
| Кормораздатчик | 1983 |
|
SU1118324A1 |
Использование: для механизации тру- доемких процессов в животноводстве. Животным раздают определенные порции корма, и информация о том, какому животному выдана какая порция корма, закладывается в задатчик 16. После того как истекло время, отводимое животным на поедание этой порции корма (это может быть время вплоть до следующего кормления), в действие вступает уборщик кормов. Он собирает остатки корма с кормораздаточного транспортера 2 и перегружает их на транспортер 3, с которого они поступают на ленточный транспортер 5, причем их расположение на транспортере 5 пропорционально их расположению на транспортере 2. С транспортера 5 остатки поступают на взвешивающий транспортер б, с помощью которого определяют вес остатков от каждого кормового ме
Фиг2
| Кормораздатчик | 1982 |
|
SU1049020A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
