В известных устройствах измерения механических ве.чичин электрическими методами производят путем прямого преобразования неэлектрической величины, подлежащей измерению, в электрическую с помощью какого-либо измерительного преобразователя. Основным недостатком приборов, построенных по принципу прямого преобразования, является зависимость их показаний от погрешностей всех элементов схемы, включая источник питания.
Один из главных путей повышения стабильности н точности показаний электрических приборов для измерения неэлектрических величин СОСТОИТ в использовании компенсационного метода с обращенными преобразователями.
Для осуществления этого метода предлагается контактное устройство для измерения медленно меняющихся средних перемещений вибрирующих объектов.
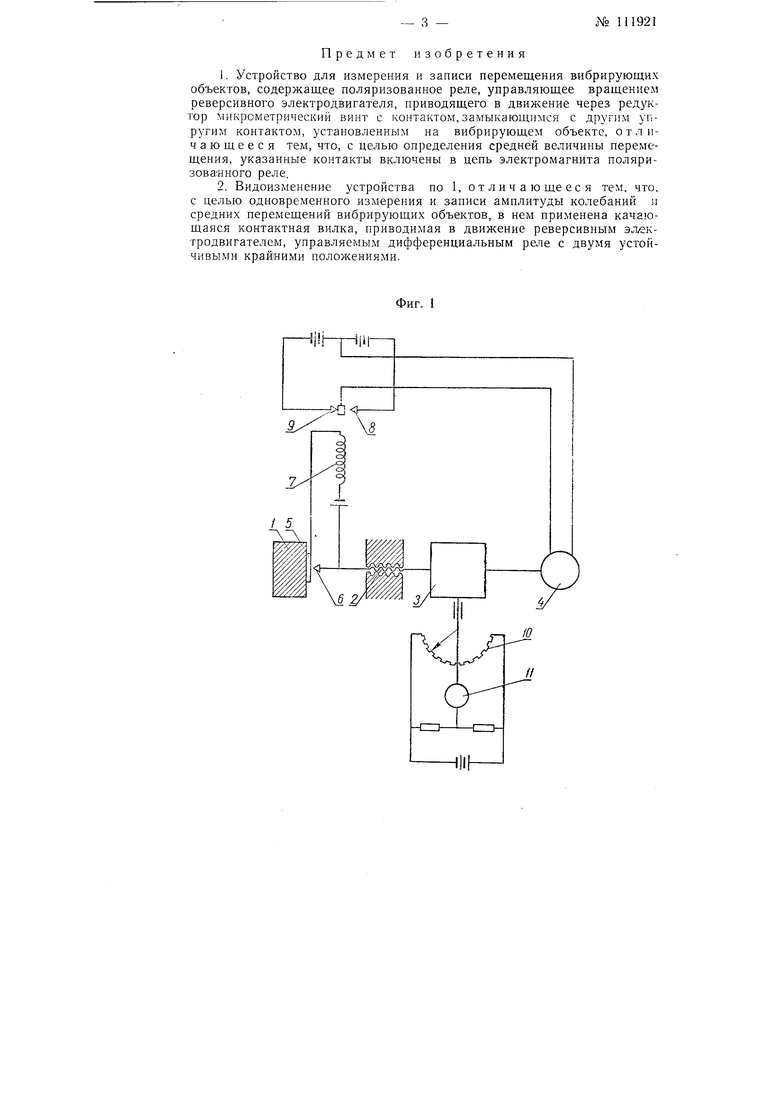
На фиг. 1 и 2 даны принципиальные схемы двух вариантов предлагаемого устройства.
На колеблющемся объекте ./ и на микрометрическом винте 2, связанном посредством редуктора 3 с реверсивным электродвигателем 4, закреплены контакты 5 и 6, включенные в цепь возбуждения поляризованного реле 7, имеющего нормально открытый контакт 8 и нормально закрытый контакт 9.
При обесточенном реле через нормально закрытый контакт 9 в. цепь реверсивного электродвигателя 4 подается ток такого направления, при котором электродвигатель, вращая микрометрический винт 2, замыкает контакты 5 ц 6. Как только контакты замкнутся, в цени электромагнита реле потечет ток, и нормально замкнутый контакт 9 разомкнется, а нормально открытый контакт 8 замкнется.
В результате этого электродвигатель 4 начнет вращаться в обратную сторону и разомкнет контакты 5 я 6.
№ 111921- 2 -
Как только контакты разомкнутся, реле обесточится, система придет в первоначальное состояние и процесс начнет повторяться.
Таким образом положение контакта 6, закрепленного на микрометрическом винте 2, определяется положением контакта 5, закрепленного на перемещающемся объекте /. Микрометрический винт 2 приводится во вращение от электродвигателя 4 через редуктор 3. Одна из осей этого редуктора приводит в движение ползунок дифференциального реохорда /(/включенного в мостовую схему. В диагональ этого моста может быть включен указывающий или самопищущий прибор / .
При измерении средних перемещений вибрирующих объектов реле 7 замыкает и размыкает контакты S и Р с частотой, равной частоте вибрации объекта /.
Если продолжительность замыкания обоих контактов реле одинакова, что соответствует среднему положению контакта 6, то на электродвигатель 4 будут поступать ,П-образные импульсы противоположной полярности и одинаковой продолжительности. И двигатель будет оставаться на месте.
Если контакт 6 не будет занимать среднего положения, то продолжительность замыкания контактов 5 и 5 окажется различной. На электродвигатель 4 будут поступать П-образные импульсы противоположной полярности и различной длительности. В результате этого через электродвигатель 4 поточет разностной ток, полярность которого соответствует полярности импульсов больщей длительности, вследствие чего двигатель будет вращать микрометрический винт 2 с контактом 6 до тех пор, пока контакт 6 не займет среднего положения и разностной ток в электродвигателе не станет равным нулю.
Таким образом положение контакта 6, закрепленного на микрометрическом винте 2, определяется средним перемещением вибрирующего объекта 1 и не зависит от амплитуды и частоты вибраций.
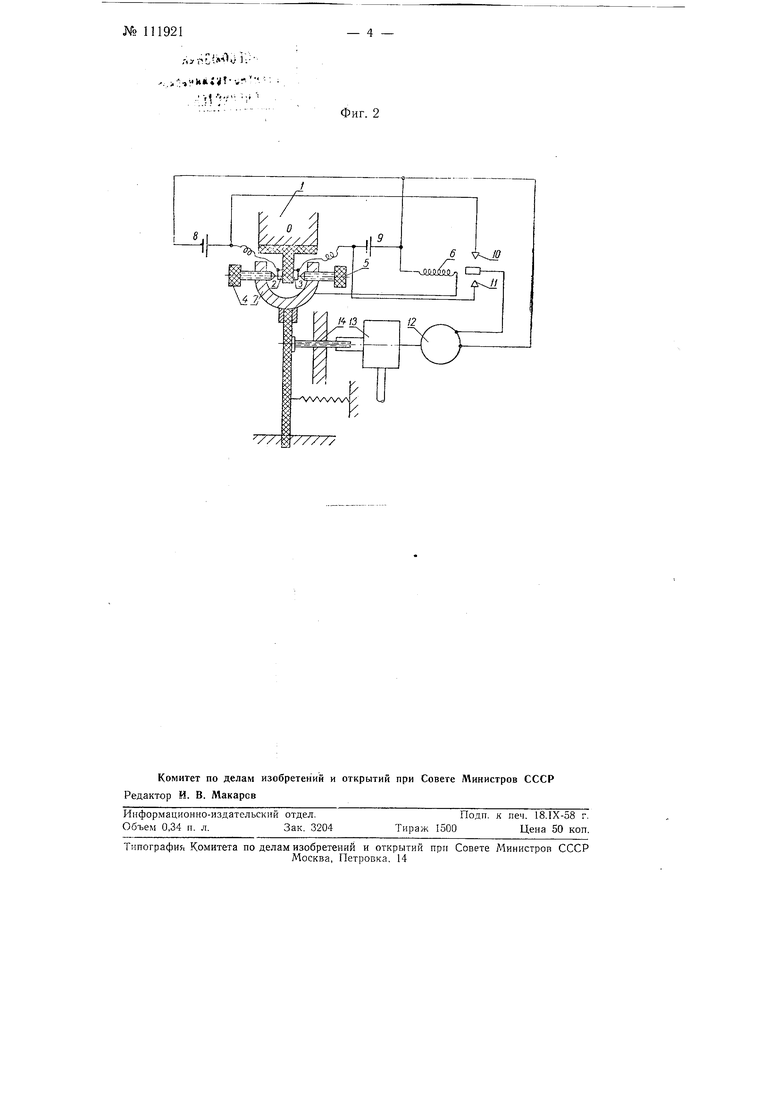
Для одновре.менного измерения и записи амплит ды колебаний и средних перемещений вибрирующих объектов устройство выполняется следующим образом (фиг. 2).
На противоположные стороны вибрирующего объекта / устанавливаются контакты 2 и 3. При колебаниях объекта / эти контакты могут замыкаться с контактами 4 и 5, расположенными на вилке 7, охватывающей вибрирующий объект 1.
Расстояние меладу контактами 4 и 5 до.тжно быть бол1лие Aijoin-ioii амплитуды колебаний объекта.
При среднем полол ении контактной вилки 7 замыкания контактов и с с контактами 4 и 5 происходить не будет.
К контактам 2 к 3 подведены положительный и отрицательный полюсы двух батарей 5 и 5 соответственно. Свободные полюсы этих батарей соединены между собой, а между средней точкой батареи и контактами 4 и 5 включена обмотка электромагнита реле 6, имеющего уетойчивы.ми оба крайних полон ения якоря. В цепь конткатов /( и // реле 6 включен электродвигатель 12. Причем при замыкании, предположим, верхнего контакта 10 реле 6, он имеет левое вращение, при замыкании нижнего контакта // - нравое.
Электродвигатель 12 через редуктор J3 и микрометрический винт 14 связан с качающейся вилкой 7 и контактами 4 и 5.
При таком выполнении контактная вилка 7 все время совершает медленные колебательные движения.
Следовательно, измерение амплитуды колебаний вибрирующего объекта и его среднего перемещения сводится к измерению амплитуды колебаний контактной вилки 7 и ее средних перемещений.
Предмет изобретения
1.Устройство для измерения и записи перемещения вибрирующих объектов, содержащее поляризованное реле, управляющее вращением реверсивного электродвигателя, приводящего в движение через редзктор микрометрический винт с контактом,замыкающимся с другим упругим контактом, установленным на вибрирующем объекте, отличающееся тем, что, с целью определения средней величины перемещения, указанные контакты включены в цепь электромагнита поляризова нного реле.
2.Видоизменение устройства по 1, отличающееся тем. что, с целью одновременного измерения и записи амплитуды колебаний и средних перемещений вибрирующих объектов, в нем применена качающаяся контактная вилка, приводимая в движение реверсивным эдектродвигателем, управляемым дифференциальным рапе с двумя устойчивыми крайними положениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1947 |
|
SU83676A1 |
| Светоловушка для уничтожения насекомых | 1989 |
|
SU1685346A1 |
| Устройство для снижения потерь на трение в карданных передачах транспортных средств | 1985 |
|
SU1229083A1 |
| Устройство для определения механических характеристик датчиков электроимпульсных манометров | 1960 |
|
SU135672A1 |
| Хлопкоуборочный аппарат | 1977 |
|
SU635916A1 |
| Устройство для определения размеров колесных пар железнодорожного подвижного состава | 1937 |
|
SU54564A1 |
| Устройство для дистанционного измерения углов наклона | 1946 |
|
SU70911A1 |
| ТРЕХПОЗИЦИОННОЕ РЕЛЕ ТОКА | 2003 |
|
RU2267829C9 |
| Весы | 1929 |
|
SU32762A1 |
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
|1|--Н1И111921
ЛУ
., ;,.,.
, rr--:Фиг. 2
4
