Известны индуктивные датчики угловых перемещений типа индуктивного потенциометра. Недостатком датчиков является то, что их выходной сигнал, пропорциональный некоторой функции угла поворота, проходит через нуль в течение оборота несколько раз.
Предлагаемая система отличается тем, что позволяет получить выходной сигнал более точно и без неопределенности, связанной с наличием у известных конструкций нескольких нулевых значений сигнала.
Роторы датчика выполнены в виде полуцилиндров, а статоры - в виде четырех пакетов с намотанными на них катушками, соединенными попарно и навстречу одна другой, и соединены с соответствующими парами катушек приемника.
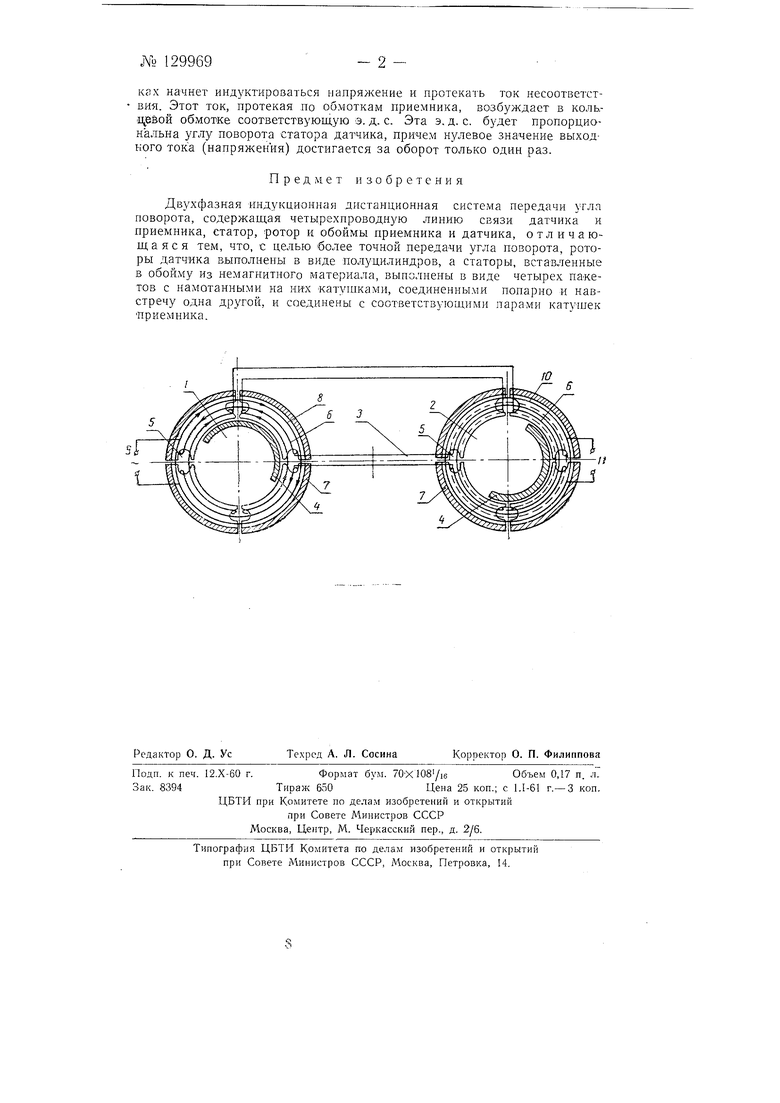
Предлагаемая система, схематически представленная на чертеже, содержит датчик / и приемник 2, соединенные четырехпроводной линией связи 3. Роторы 4 датчика и приемника выполнены в виде полуцилиндра из магнитопроводящего материала, а статоры 5 - в виде четырех пакетов, на каждый из которых надета катушка 6. Все пакеты вставлены в корпус 7 Из магнитонепроводящего материала. Па пакеты надета также общая кольцевая катушка возбуждения датчика 8.
Катушки на пакетах соединены попарно и навстречу, а выводы их от датчика подсоединены К соответствующим выводам приемника. Катушка возбуждения датчика питается переменным током промышленной частоты от источника 9, а такая же катушка 10 приемника служит сигнальной катушкой и подсоединена к измерительному прибору 11.
В начальном положении передачи угла поворота роторы расположены под углом 90° один относительно другого, то есть относительно соответствующих обмоток. Статор приемника ненодвижен. При повороте ротора датчика изменяется его шунтирующее действие и в обмотKPiX начнет индуктргроваться напряжение и протекать ток несоответстВИЯ. Этот ток, протекая по обмоткам приемника, возбуждает в коль. обмотке соответствующую э. д. с. Эта э. д. с. будет пропорциональна углу поворота статора датчика, причем нулевое значение выходного тока (напряжения) достигается за оборот только один раз. Предмет изобретения Двухфазная индукционная дистанционная система передачи угла поворота, содержащая четырехпроводную линию связи датчика и приемника, статор, ротор и обоймы приемника и датчика, отличающаяся тем, что, с целью более точной передачи угла поворота, роторы датчика выполнены в виде цолуцилиндров, а статоры, вставленные в обойму из немагнитного материала, выполнены в виде четырех пакетов с намотанными на них «атунжами, соединенными попарно ц навстречу одна другой, и соединены с соответствующими парами катушек Приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехпозиционное электромагнитное реле | 1953 |
|
SU104177A1 |
| Бесконтактный синусно-косинусный преобразователь | 1955 |
|
SU103888A1 |
| Индукционный прибор для преобразования напряжения переменного тока | 1953 |
|
SU103496A1 |
| Преобразователь напряжения переменного тока | 1951 |
|
SU97820A1 |
| Компенсационная схема для измерения амплитудно-фазовой погрешности индукционного синусно-косинусного преобразователя | 1950 |
|
SU111953A1 |
| Асинхронный тахометр | 1948 |
|
SU109307A1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| Устройство для измерения и регистрации скорости и направления ветра | 1960 |
|
SU134494A1 |
| Бесконтактный электрический датчик линейных перемещений | 1957 |
|
SU116599A1 |
