ке и может быть применено при разработке и модернизации следящих приводов с синхронной связью на вращающихся трансформаторах (ВТ), в которых ось ВТ-приемника связана с осью поворота объекта регулирования через редуктор.
Цель изобретения - расширение диапазона рабочих углов компенсации сум- 10 датчика 7 так, чтобы после поворота
марной погрешности дистанционной передачи угла и кинематической погрешности редуктора, соединяющего ось ВТ-приемника с осыа поворота объекта регулирования.
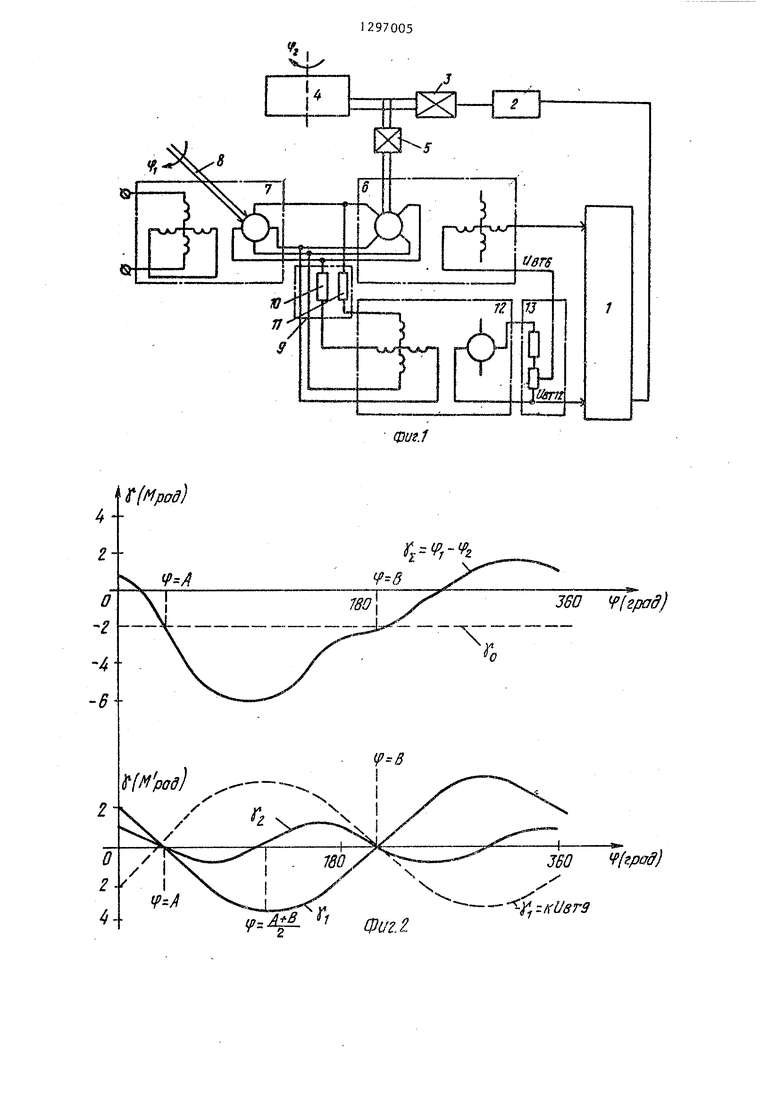
На фиг.1 изображена блок-схема предлагаемого следящего привода; на фиг.2 - частный случай компенсации суммарной погрешности; на фиг.З - фазовращатель огибающей, выполненный на суммирующем операционном делителе
Следящий привод содержит последовательно соединенные усилитель 1,исполнительный двигатель 2, механическую передачу 3, объект 4 регулирования и редуктор 5,. соединяющий объект 4 регулирования с ротором. ВТ-при ег-шика 6. Роторные обмотки ВТ-приемника 6 соединены цепями синхронной связи с одноименными обмотками ВТ- датчика 7, ротор которого соединен с ведущим валом 8. К цепям синхронной связи через блок 9 резисторов, выполА+В, .
1/
+ 180
т.е. в эксненный на резисторах 10 и 11, подклю- 2 2 чены входы фазовращателя 12 огибаю- 35 тремальных точках первой гармоники, щей, выход которого через делитель 13 у компенсируемой погрешности, которая, таким образом, будет полностью скомпенсирована не менее чем в 4-х
напряжения соединен с сигнальной обмоткой ВТ-приемника 6 и входом усилителя 1. В данном случае для одного из вариантов реализации привода на фиг,1 в .качестве фазовращателя огибающей изображен вращающийся трансформатор. При проведении работ по юстировке вначале определяют погрешточках в пределах рабочего угла 360 40 Остаточная погрешность 3, после указанных операций будет иметь не менее 4-х нулей и амплитуду, в несколько раз меньшую, чем суммарная погрешность Ji, причем рабочий диапа
точках в пределах рабочего угла 360 . 40 Остаточная погрешность 3, после указанных операций будет иметь не менее 4-х нулей и амплитуду, в несколько раз меньшую, чем суммарная погрешность Ji, причем рабочий диапаность Ч - ч (угла Ч „ поворота объек- 45 зон углов работы привода расширяется
до величины, не меньшей полного оборота.
Вариант фазовращателя огибающей, изображенный на фиг. 3 и выполненный 50 на потенциометрах 14 и 15 и опера- rJ;иoннoм усилителе 16, может быть применен Б случаях, когда усилитель привода имеет операционные усилители и соответственно источники питания для 55 них.
При этом выводы Вх1 этого фазовращателя подключают через сопротивление блока резисторов, например, к синусной цепи синхронной связи, а вы ч 2
та 4 по отношению к углу Ч поворота
ведущего вала 8) по напряжению сигнала и g , снимаемого с ВТ-приемника 6 при нулевом (нижнем по схеме) положении движка переменного резистора делителя 13 напряжения. Погрешность Ч,-,, является суммарной, так как включает в себя кроме кинематической погрешности редуктора 5 погрешность дистанционной передачи угла, обусловленную технологическими допусками изготовления вращающихся трансформаторов, а также погрешностью сборки и установки приборов.
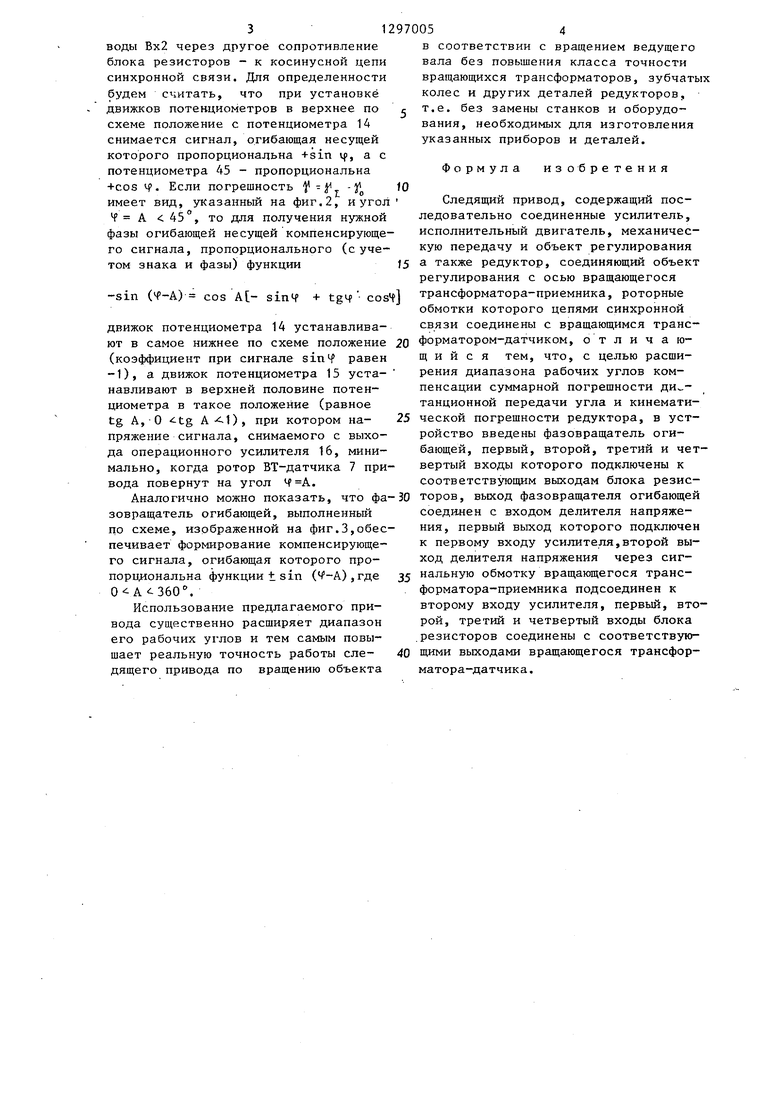
ных случаев, вид кривой суммарной погрешности у Из этой погрешности могут быть вьщелены: постоянная составляющая первая гармоника , имеющая период равный 1-му обороту ВТ, и остаточная погрешность у Постоянную составляющую Y компенсируют,например, путем поворота статора ВТмаксимумы абсолютных величин погрешности отставания (минимум У ) и погрешности опережения (максимум )f ) были равны.
5 Первую гармонику компенсируют с помощью введенных фазовращателя 12 огибающей и делителя 13 напряжения. Для смещения (вращения) фазы огибающей компенсирующего сигнала ротор ВТ0 приемника 6 устанавливают в положение, при котором напряжение сигнала, снимаемого с роторной обмотки,становится минимальным, когда ротор ВТ датчика 7 повернут на угол Ч А или
4 В, т..е. в нулях первой гармоники. Затем ДВ1ЖКОК переменного резистора делителя 13 напряжения устанавливают так, чтобы амплитуды погрешности и компенсирующего сигнала бы0 ли одинаковы, т.е. сумма сигналов
Ug + Ug была минимальной при установке ротора ВТ-датчика 7 на угол А+В
А+В, .
1/
+ 180
т.е. в экс2 2 5 тремальных точках первой гармоники, у компенсируемой погрешности, которая, таким образом, будет полностью скомпенсирована не менее чем в 4-х
точках в пределах рабочего угла 360 . 40 Остаточная погрешность 3, после указанных операций будет иметь не менее 4-х нулей и амплитуду, в несколько раз меньшую, чем суммарная погрешность Ji, причем рабочий диапаводы Вх2 через другое сопротивление блока резисторов - к косинусной цепи синхронной связи. Для определенности будем считать, что при установке движков потенциометров в верхнее по схеме положение с потенциометра 14 снимается сигнал, огибающая несущей которого пропорциональна +sin ip, а с потенциометра 45 - пропорциональна +COS ч. Если погрешность имеет вид, указанный на фиг.2, и угол Ч А 45°, то для получения нужной фазы огибающей несущей компенсирующего сигнала, пропорционального (с учетом знака и фазы) функции
-sin (Ч -А) cos sinif + cos
движок потенциометра 14 устанавливают в самое нижнее по схеме положение (коэффициент при сигнале sin Ч равен -1), а движок потенциометра 15 устанавливают в верхней половине потенциометра в такое положение (равное tg А, О ), при котором на- пряжение сигнала, снимаемого с выхода операционного усилителя 16, минимально, когда ротор ВТ-датчика 7 привода повернут на угол .
Аналогично можно показать, что фазовращатель огибающей, выполненный по схеме, изображенной на фиг.3,обеспечивает формирование компенсирующего сигнала, огибающая которого пропорциональна функции в in (Ч -А),где
Использование предлагаемого привода существенно расширяет диапазон его рабочих углов и тем самым повышает реальную точность работы еле- дящего привода по вращению объекта
в соответствии с вращением ведущего вала без повышения класса точности вращающихся трансформаторов, зубчат колес и других деталей редукторов, т.е. без замены станков и оборудования, необходимых для изготовления указанных приборов и деталей.
Формула изобретения
Следящий привод, содержащий последовательно соединенные усилитель, исполнительный двигатель, механическую передачу и объект регулирования а также редуктор, соединяющий объект регулирования с осью вращающегося трансформатора-приемника, роторные обмотки которого цепями синхронной связи соединены с вращающимся трансформатором-датчиком, отличающийся тем, что, с целью расширения диапазона рабочих углов компенсации суммарной погрешности ди.- танционной передачи угла и кинематической погрешности редуктора, в устройство введены фазовращатель огибающей, первый, второй, третий и четвертый входы которого подключены к соответствующим выходам блока резисторов, выход фазовращателя огибающей соединен с входом делителя напряжения, первый выход которого подключен к первому входу усилителя,второй выход делителя напряжения через сигнальную обмотку вращающегося трансформатора-приемника подсоединен к второму входу усилителя, первый, второй, третий и четвертый входы блока резисторов соединены с соответствующими выходами вращающегося трансформатора-датчика.
N-:
Фиг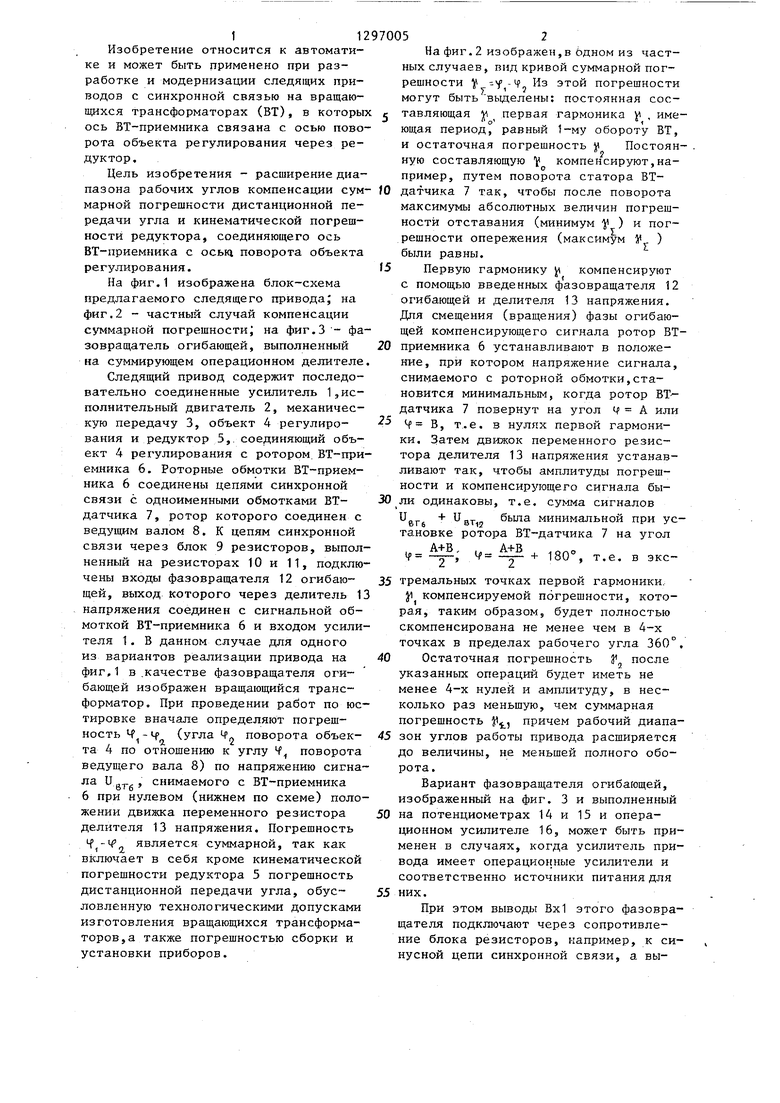
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1978 |
|
SU697965A1 |
| Устройство для проверки многополюсных датчиков угла | 1975 |
|
SU525151A1 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ТРАНСЛЯЦИИ УГЛА ПОВОРОТА ВАЛА | 2006 |
|
RU2319214C1 |
| Устройство для сравнения выходных напряжений объектов, работающих на переменном токе | 1974 |
|
SU737842A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| Компенсационная схема для измерения амплитудно-фазовой погрешности индукционного синусно-косинусного преобразователя | 1950 |
|
SU111953A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для измерения температуры вращающихся объектов | 1975 |
|
SU657276A1 |
| Магнитометр | 1973 |
|
SU446859A1 |
Изобретение относится к автоматике и может быть применено при разработке следящих приводов с синхронной связью на вращающихся трансформаторах (ВТ). Целью изобретения является расширение диапазона рабочих углов компенсации суммарной погрешности дистанционной передачи угла и кинематической погрешности редуктора, соединяющего ось ВТ-приемника с осью поворота объекта регулирования. Наличие в схеме привода фазовращателя огибающей,например вращающегося трансформатора, входные цепи которого подключены к цепям синхронной связи через блок резисторов, а выход - через делитель напряжения к сигнальным обмоткам ВТ-приемника и входу усилителя, расширяет до 360 диапазон углов, в которых проводится компенсация кинематической погрешности. 3 ил. @ (Л с ю со О.
(Мрод
- «JU--rN и
4- Фиг.1
360 spaff)
J60 )
- - У -кивГ9
8х.2
Редактор И. Касарда
Составитель С. Никишов
Техред А.Кравчук Корректор Н. Король
Заказ 779/50Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
фиг.З
| УСТРОЙСТВО для КОРРЕКТИРОВАНИЯ ПОГРЕШНОСТЕЙ ЧЕРВЯЧНОЙ ПАРЫ | 0 |
|
SU179009A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящий привод | 1978 |
|
SU697965A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
