пневмологического элемента И, а его выход соединен через четвертый пневмоусилитель с управляющей полсгстью распределителя поршневой полости пневматического цилиндра. 2. Устройство управлейия штамповочным молотом, в частности бесшаботным, содержащим соединенные гибко связью две бабы, одна из которых свя зана со штоком пневматического поршн вого цилиндра, содер«сащее соединенны с органом управления сигнальный датчик в виде смонтированного в корпусе с отверстиями золотника, блок дистан ционного управления, а также источник давления и соединенные трубопроводами со штоковой и поршневой полостями пневматического цилиндра главный и вспомогательный распредели тели с управляющими полостями, о тличающееся тем, что, с целью повьш1ения его надежности и улучшения условий эксплуатации, блок дистанционного управления выполнен в виде соединенных с источником давления пневмологических элементов НЕ и И-НЕ, двух пневмологических элементов И, четьфех дросселей, трех пневмоусилителей и пневматического конечного переключателя, на золотнике сигнального датчика выполнены кольцевая канавка, образующая с внутренней поверхностью корпуса замкнутую кольцевую полость, и каналы для соединения упомянутой полости с атмосферой, а в корпусе сигнального датчика выполненычетыре радиальных отверстия и канал для соединения замкнутой кольцевой полости с полостью, расположенной под торцом золотника, при этом управляющие полости главного распределителя соединены через два пневмоусилителя с выходами пневмологических элементов НЕ и И-НЕ, входы пневмологических элементов НЕ и И соединены соответственно с первым, вторым и третьим отверстиями сигнального датчика и через дроссели с источником давления, выход первого пневмологического элемента И соединен с управляющей полостью вспомогательного распределителя и входом пневмологического элемента И-НЕ, пневматический конечный выключатель соединен своим входом с источником давления и выходом - с входом пневмологического элемента И-НЕ, а вход пневмологического элемента И-НЕ соединен с четвертым отверстием корпуса сигнального датчика и через дроссель с выходом второго пневмологического элемента И. .




| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пневматическим молотом | 1987 |
|
SU1438902A1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Бесшаботный штамповочный молот | 1955 |
|
SU112789A1 |
| Устройство управления бесшаботным молотом | 1986 |
|
SU1362557A1 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2006 |
|
RU2334583C2 |
| Вертикальный бесшаботный молот | 1981 |
|
SU984606A1 |
| Система управления гидропневматическим молотом | 1987 |
|
SU1532174A1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2560216C1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| СПОСОБ ПРЕССОВАНИЯ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ПРИВОДОМ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2346816C2 |
1 .Устройство управления штамповочным молотом, в частности бесшаботным, содержащим соединенные гибкой связью две бабы, одна из которых связана со штоком пневматического поршневого цилиндра, содержащее соединенный с органом управления сигнальный датчик в виде смонтированного в корпусе с отверстиями золотника, блок дистанционного управления, а также источник давления и соединенные трубопроводами со штоковой и поршневой полостями пневматического цилиндра распределители с управляющими полостями, о тличающееся тем, что, с целью повьш1ения его надежности и улучшения условий эксплуатации, блок дистанционного управления вьшолнен в виде соединенных с источником давления пневмологических элементов НЕ и И-НЕ, трех пневмологических элементов И, пяти дросселей, четырех пневмоусилителей и пневматического конечного переключателя, на золотнике сигнального датчика выполнены кольцевая канавка, образующая с внутренней поверхностью корпуса замкнутую кольцевую полость, и каналы для соединения упомянутой полости с атмосферой, а в корпусе сигнального датчика выполнены пять радиальных отверстий и канал для соединения замкнутой кольцевой полости с полостью, расположенной над торцом золотника, при этом пневмологический элемент НЕ соединен своим входом с первым отверстием корпуса сигнального датчика и через дроссель - с источником давления, а выходом - через первый пневмоусилитель с управляюшрйми полостями распределителей штоковой полости пневматического цилиндра, два пневмологических элемента И соединены сл (СВОИМИ входами соответственно с вторым и третьим отверстиями корпуса с сигнального датчика и через дроссели - с источником давления и выходами - с входами пневмологического эле,мента И-НЕ и через второй и третий пневмоусилители они соединены с упto равляющими полостями распределителей о со ю поршневой полости пневматического цилиндра, четвертый пневмологический элемент И связан своим входом с четвертым отверстием корпуса сигнального датчика и через дроссель - с источником давления, а выходом - с входом пневмологического элемента И-НЕ, пневматический конечный переключатель соединен своим входом с источником давления и выходом - с входом пневмологического элемента И-НЕ, вход пневмологического элемента И-НЕ соединен с пятым отверстием корпуса сигнального датчика и через дроссель - с выходом четвертого
Изобретение относится к машиностроению, а именно к конструкциям управляющих устройств штамповочных молотов.
Известно устройство управления штамповочным молотом, в частности бесшаботным, включаюпщм соединенные между собой гибкой связью две бабы, одна из которых связана со штоком пневматического поршневого цилиндра содержащее соединенный с органом управления сигнальный датчик в виде смонтированного в корпусе с отверстими золотника, блок дистанционного управления, а также источник давления и соединенные трубопроводами со штоковой и поршневой полостями пневматического цнпиндра распределители
с управляющими полостями. В известно устройстве движение баб осуществляется при перемещении поршня пневматического цилиндра, управляемого с помощью рукоятки, связанной с золотником сигнального датчика Л .
Недостаток известного устройства малая надежность.
Цель изобретения - повышение надежности и улучшение условий эксплуатации.
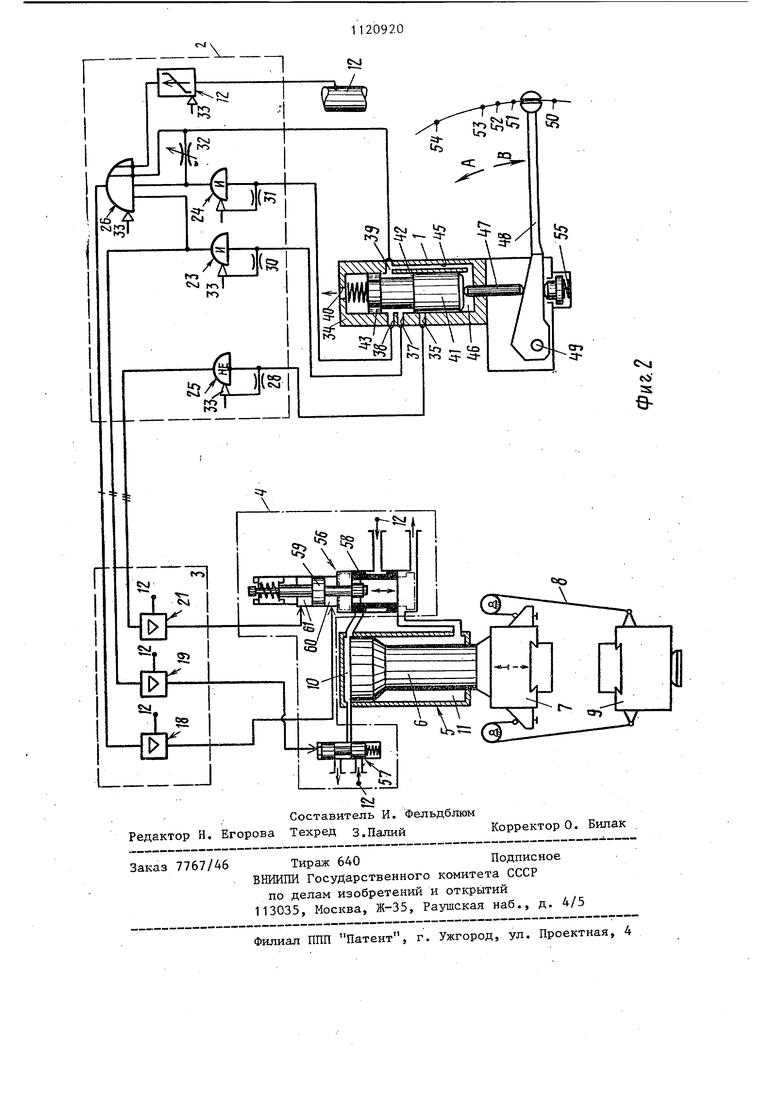
Указанная цель достигается за счет того, что в устройстве управления штамповочным молотом, в час ности бесщаботным, содержащим соединенные гибкой связью две бабы, одна из которых связана со штоком пневматического поршневого цилиндра, содержащее соединениьи с органом упраиления снгигяльнын датчик в виде смонтированного в корпусе с отверстиями золотника, блок дистанционного управления, а также источни ;-давления и соединенные трубопроводами со штоковой и поршневой полостями пневматического цилиндра распределители с управляющими полостями, блок дис танционного управления выполнен в виде соединенных с источником давления пневмологических элеме1Ттов НЕ и И-НЕ, трех пневмологических элемен тов И, пяти дросселей, четырех пнезмоусилителей и пневматического конеч него переключателя, на золотнике сиг нального датчика выполнены кольцевая канавка, образующая с внутренней поверхностью корпуса замкнутую кольцевую полоать, и каналы для соединения упомянутой полости с атмосферой,а в корпусе сигнального датчика выполнен пять радиальных отверстий и канал дл соединения замкнутой кольцевой полости с полостью, расположенной над торцом золотника, при этом пневмологический элемент НЕ соединен своим входом с первым отверстием кор пуса сигнального датчика и через дроссель - с источником давления, а выходом - через первый пневмоусипитель с управляющими полостями распределителей штоковой полости пневматического цилиндра, два пневмо логических элемента И соединены свои ми входами соответственно со вторым и третьим отверстиями корпуса сигнал ного датчика и через дроссели - с источником давления и выходами - со входами пневмологического элемента И-НЕ и через второй и третий пневмоусшштели они соединены с управляющими полостями распределителей поршневой полости пневматического цилинд ра, четвертый пневмологический элемент И связан своим входом с четвертым отверстием корпуса сигнального датчика и через дроссель - с источни ком давления, а выходом - со входом пневмологического элемента И-НЕ, пневматический конечный переключатель соединен своим входом с источником давления и выходом - со входом пневмологического элемента И-НЕ, вхо пневмологического элемента И-НЕ соединен с пятым отверстием корпуса сигнального датчика и через дросс1ель с выходом четвертого пневмологичес- 20. KOJo олсмспта И, а его выход соединен через четвертый пневмоусилитель с управляющей полостью распределителя поршневой полости пневматического цилиндра. Указанная цель, как вариант, достигается также за счет того, что в устройстве управления штамповочным молотом, в частности бесшаботным, содержащим соединенные гибкой связью две бабы, одна из которых связана со штоком пневматического поршневого цилиндра, содержащем соединенный с органом управления сигнальный датчик в виде смонтированного в корпусе с отверстиями золотника, блок дистанционного управления, а также источник давления и соединенные трубопроводами со штоковой и поршневой полостями пневматического цилиндра главный и вспомогательный распределители с управляю1цими полостями, блок дистанционного управления выполнен в виде соединенных с источником давления пневмологических элементов НЕ и И-НЕ, двух пневмологических элементов И, четырех дросселей, трех пневмоусилителей и пневматического конечного переключателя, на золотнике сигнального датчика выполнены кольцевая канавка, образующая с внутренней поверхностью корпуса замкнутую кольцевую полость, и каналы для соединения упомянутой полости с атмосферой, а в корпусе сигнального датчика выполнено четыре радиальных отверстия и канал для соединения замкнутой кольцевой полости с полостью, расположенной под торцом золотника, при этом управляющие полости главного распределителя соединены через два пневмоусилителя с выходами пневмологических элементов НЕ и И-НЕ, входы пневмологических элементов НЕ и И соединены соответственно с первым, вторым и третьим отверстиями сигнального датчика и через дроссели - с . источником да,зления, выход первого пневмологического элемента И соединен с управляющей полостью вспомогательного распределителя и входом пневмологического элемента И-НЕ, пневматический конечный выключатель соединен своим входом с источником давления и выходом - со входом пневмологического элемента И-НЕ, а вход пневмологического элемента И-НЕ соединен с четвертым отверстием корпуса сигнального датчика и через дроссель - с выходом второго пневмоло- гического элемента И, На фиг.1 показана схема управляющего устройства молота с блоком из пяти распределителей; на .2 - схе ма управляющего устройства молота с главным и вспомогательным распределителями. Устройство (фиг.1) содержит сигнальный датчик 1, соединенный через блок дистанционного .управления, вклю чающий управляющий 2 и усилительный 3 блоки с распределительной коробкой 4 пневматического поршневого цилиндр 5, шток 6 которого связан с бабой 7, соединенной гибкой связью 8 со второй бабой 9. В хщлиндре 5 образованы поршневая 10 и штоковая 11 полости. Питание сжатым воздухом осуществляется от источника 12 давления. Распределительная коробка 4 содержит распределители 13 - 17 с управляющими полостями. Входы распределителей 13 и 14 соединены с источником 12 давления, а их выходы - с полостью 10, вход распределителя 15 соединен с полостью 10, а его выход - с атмосферой, входы распределителей 16 и 17 соединены соответственно с атмосферой и источником 12 давления, а их выходы - с полостью 11. Уснлительный блок 3 содержит соединенные с источником 12 давления пневмоусилители 18 - 21. Управляющий блок 2 содержит пневмологические эле менты И 22 - 24, пневмологический элемент НЕ 25, пневмологический элемент И-НЕ 26, пневматический конечный выключатель 27 и дроссели 28-32 Входы пневмологических элементов 22 26, а также конечного выключателя 27 соединены с трубопроводом 33 низкого давления. Сигнальный датчик 1 содержит корпус 34 с отверстиями 35 40, в последнем смонтирован подпружиненный золотник 41 а кольцевой канавкой 42 и каналами 43 для соединения замкнутой полости 44 с атмосфе рой. Отверстие 39 соединено со входом пневмологического элемента 26 и через канал 45 с полостью 46. Золотник 41 через толкатель 47 связан с, рукояткой 48, смонтированной на оси 49 и имеющей пять фиксированных положений 50 - 54. Рукоятка 48 прижата к толкателю 47 пружиной 55. Отверстия 35-38 соединены со входа 1 0 ми пневмологических элементов 22 - 25. Выходы элементов 22, 23 и 25 соединены с пневмоусилителями 19 - 21, а выход пневмологического элемента 26 соединен с пневмоусилителем 18. В управляищем устройстве молота с главньм и вспомогательным распределителями (фиг.2) в корпусе 34 сигнального датчика 1 выполнено пять отверстий 35 - 40, причем отверстие 39 через канал 45 соединено с полостью 46 золотника, управляющий блок 2 содержит пневмологические элементы И 23 и 24, пневмологический элемент НЕ 25, пневмологический элемент И-НЕ 26 и конечный переключатель 27, а усилительный блок содержит три пневмоусилителя 18 - 21. Распределительная коробка 4 состоит из главного 56 и вспомогательного 57 распределителей В распределителе 56 имеется золотник 58, соединенный с поршнем 59 сервопривода, полости 60 и 61 которого соединены соответственно с пневмоусилителями 18 и 21, Управляющая полость распределителя 57 соединена с пневмоусилителем 19. Устройство работает следующим образом. При подъеме рукоятки 48 из исходного положения в положение 51 золотник 41 поднимается, отверстие 36 пефекрывается, вход пневмологического элемента 22 отсоединяется от атмосферы и давление на входе элемента 22 повьш1ается до величины срабатывания, в результате чего элемент 22 вырабатывает выходной сигнал. Сигнал от элемента 22 усиливается пневмоусилителем 20 и подается к управляющей полости распределителя 15, в результате чего золотник распределителя 15 поднимается, отсекая полость 10 от атмосферы. Одновременно сигнал от элемента 22 поступает на вход пневмологичес элемента 26. После перевода рукоятки 48 по стрелке А в положение 53 золотником 41 перекрывается отверстие 37, в результате чего давление на сигнальном входе пневмологического элемента 35 повьш1ается до величины срабатывания, и выходной сигнал элемента 35 через усилитель 19 поступает к распределителю 14, перемещая его золотник вправо, при котором давление от источника 12 поступает в полость 10. 7 1 Баба 7 медленно движется вниз, а баба 9 - вверх. Одновременно выходной сигнал элемента 23 поступает на сигнальный вход пневмологического элемента 26. После поворота рукоятки 48 вверх в положение 53 отверстия 38 и 39 перекрываются ррмкой золотника 41, в результате чего на сигнальном входе элемента 24 создается давление срабатывания, которое поступает на третий сигнальный вход пневмологического элемента 26. Одновременно давление от элемента 24 поступает в полость 46 золотника 41 через дроссель 32. Как только все три сигнальных входа пневмологического элемента 26 оказываются под давлением срабатывания, вбграбатывается выхоДной сигнал, котррый через пневмоусилитель 18 поступает в .управляющую полость распределителя 13 - из источника 12 давление поступает в полость 10, и баба 8 с ускорением движется вниз, а баба 9 - вверх. После перевода рукоятки 48 в положение 54 давление в полости 46 увеличивается. Как только давление в полости пневмологического элемента 28 повысится до давления срабатывания, сигнальный вход пневмологического элемента 26 отключает его выход, в результате чего распределитель 13 возвращается в исходное положение, в котором прекращается доступ воздуха в полость 10. Заполнение воздухом полости 10 для осуществления удара обуславливается временем заполнения полости 46 регулируемым дросселем 32 и, следователь но, можно бесступенчато регулировать силу удара посредством установки рукоятки 48 в требуемое положение между позициями 53 и 54,- а также посред ством регулировки дросселя 32. После удара рукоятка 48 поворачивается по стрелке В в нижнее рабочее положение 50, в котором открывае ся отверстие 35 корпуса 34, в резуль .тате чего вход пневмологического элемента 28 через отверстия 40 и 41 соединяется с атмосферой, и давление на входе снижается до величины, мень шей давления срабатьшания, так как воздух из трубопровода 23 низкого давления через дроссель 28 и отверстия 35, 43, 40 выходит в атмосферу. После прекращения сигнала на входе 0о элемента 25 появляется его выходной сигнал, в результате чего перемещаются в рабочее положение посредством пневмоусилителя 21 золотники распределителей 16 и 17,в результате чего прекращается выход воздуха из полости 16 через распределитель 11 и начинается заполнение полости 11 через распределитель 17. Бабы 7 и 9 возвращаются в исходное положение. Рукоятка 48 возвращается в исходное положение, отверстие 35 закрывается, давление воздуха, протекающего через дроссель 28, на сигнальном входе пневмологического элемента 25 достигается давление срабатывания, вследствие чего прекращает поступать его выходной сигнал, а распределители 16 и 17 возвращаются в исходное положение. Если давление в источнике 12 превышает заданную величину, выходной сигнал конечного выключателя 27 поступает на сигнальный вход пневмологического элемента 26, в результате чего прекращается подача его выходного сигнала до тех пор, пока в источнике 12 давление превышает необходимую величину. Работа управляющего устройства с главным и вспомогательным распределителями осуществляется в основном так же, как описано. Отличие состоит в том, что полости 10 и 11 пневматического цилиндра 5 заполняются воздухом и освобождаются от него с помощью одного распределителя 56, перемещаемого от сигналов пневмоусилителей 18 и 21. В среднем исходном положении золотника 58 полости 10 и 11 не заполняются воздухом, при этом воздух из полости 10 удален через распределитель 57, который управляет медленным встречным движением баб 7 и 9. При повороте рукоятки 48 вверх в положения 52 и 53 пневмологические элементы 23 и,- 24- приводят в действие вначале пневмоусилитель 19 распределителя 57, а затем пневмоусилитель 18,в результате чего поршень 59 перемещается вверх и полость 10 заполняется воздухом для осуществления удара. После удара рукоятка 48 поворачивается вниз в направлении стрелки В в положение 50, в результате чего золотник 58 перемещается в нижнее положение, и из полости 10удаляется 9 воздух, а полость 11 заполняется духом, и бабы 7 и 9 возвращаются исходное положение. , 1120920 воз- При повороте рукоятки 48 в исходв ное положение золотник 58 перемещается в свое среднее положение.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU154139A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
