Изобретение относится к области пневматических приводов применяемых в силовых и вспомогательных механизмах и машинах технологического оборудования, где требуется синхронная работа двух и более пневмоцилиндров способных адаптироваться к переменной нагрузочной силе на выходном звене.
Известен пневматический привод (см. Энергосберегающие пневматические приводы технологических машин/ А. И. Евдокимов [и др.] // Владимирский государственный университет.- 2010.- №2. стр.22 URL: https://elibrary.ru/item.asp?id=13218677& (Дата обращения: 18.10.2016)), содержащий пневматический цилиндр, двухпозиционные трехлинейные распределители, штанга, серьга связывающая штангу со штоком, толкатель, датчик угла, обратные клапаны, ресивер. Данная система управления может работать в двух режимах: типовом и «самоходе». В режиме «самохода» перемещение груза происходит под действием сил тяжести, при определенном угле отклонения осевой линии пневмоцилиндра.
Известен пневматический привод (см. патент RU № 2 241 867, F15B11/06, опубликовано 10.12.204, Бюллетень №34), содержащий пневматический цилиндр, двухпозиционный четырехлинейный пневмораспределитель, дроссель, программный (пневматический) блок, двухпозиционные двухлинейные распределители соединенные с набором регулируемых пневмоемкостей, преобразователь типа масса - код, состоящим из устройства взвешивания (весов) и преобразователя типа аналого-цифровой двоичный код, а выходы преобразователя соединены с входами логических модулей, состоящих из цепочки логических элементов в виде триггера (памяти) с раздельными входами и элементов, реализующих логические функции ИЛИ, И и выполненных на струйных турбулентных элементах, реализующих функцию НЕ-ИЛИ, а выходы модулей соединены с управляющими входами распределителей, входы - с выходами программного блока. В данном варианте схемы при работе привода с разной массой осуществляется опережающее, пристраивание структуры привода, т.е. его адаптация к изменяющейся нагрузке на выходном звене.
Известен регулятор давления газа (см. SU № 830342 кл. D16/10, 1981: опубл. 15.05.81 Бюл. № 18), содержащий корпус с входной и выходной полостями. В корпусе размещено выполненное в виде поршня и нагруженное регулируемой посредством винта и тарели пружиной седло, в котором установлен дросселирующий клапан с пружиной и толкателем. Толкатель взаимодействует с поршневым чувствительным элементом, связанным с пружиной здания, сжатие которой регулируется винтом через тарель. Пружина седла и пружина здания закрыты стаканами и выполнены с возрастающей нелинейной жесткой упругой характеристикой. В выходной полости на седле и чувствительном элементе соосно им установлены стаканы, сопряженные между собой по ходовой несамотормозящей резьбе. В стаканах имеются отверстия для выхода газа.
Известен пневматический регулятор давления (см. Новости приводной техники № 3-4: [Электронный ресурс]. URL: https://www.camozzi.ru/documents/5.pdf _ 2010. (Дата обращения: 18.09.2016)) состоящий из корпуса, в котором находятся входная и выходная полости, мембраны с жесткой центральной часть, нагрузочной пружины, силу которую можно изменять, вращая рукоятку, толкателя, возвратной пружины, выхлопного отверстия.
В качестве наиболее близкого анализа выбран пневматический привод (см. Кудрявцев А. И., Пятидверный А. П., Рагулин Е. А. Монтаж и эксплуатация пневматических приводов и устройств. -М.: «Машиностроение», 1990, стр.8, рис.1.3-к), содержащий пневматический цилиндр, два двухпозиционных трехлинейных пневмораспределителя и два редукционных клапана. В схемы устройства системы подача сжатого воздуха осуществляется в разные полости пневмоцилиндра, давление в которых можно изменять независимо друг от друга, с помощью редукционных клапанов, что позволяет регулировать скорость и развиваемое усилие на штоке.
Недостатком данного пневматического привода является то, что при увеличении или понижении нагрузочной силы на выходном звене - скорости исполнительного механизма будут отличаться нестабильностью, так как изменение расхода сжатого воздуха в полостях пневмоцилиндра не возможно при настройке редукционных клапанов на одно и тоже давление.
Задача изобретения - стабилизация скорости движения механизмов и машин технологического оборудования путем создания адаптивного пневмопривода
Сущность изобретения заключается в том, что адаптивный пневматический привод с обратной пневматической связью, включающий пневмоцилиндр, пневмораспределитель, дополнительно содержит пневматический датчик скорости, клапан давления, пневматический усилитель и обратный клапан;
- клапан давления дополнительно содержит подвижный цилиндр с поршнем .
- пневматический усилитель содержит корпус, разделенный на две полости, одна из которых, подмембранная полость с мембраной, предназначена для подачи в нее управляющего сигнала от датчика скорости.
В совокупности устройство адаптивного пневматического привода дают возможность получения информации об изменении скорости движения выходного звена пневмоцилиндра и преобразуют полученную информацию в управляющий сигнал, который изменяет нагрузочную силу пневмоцилиндра.
Технический результат достигается тем, что адаптивный пневматический привод позволяет стабилизировать скорость движения выходного звена пневмопривода при воздействии на него переменной нагрузки.
Сущность изобретения поясняется чертежом, где на
фиг.1 изображена схема адаптивного пневматического привода с обратной пневматической связью;
фиг.2 - клапан давления;
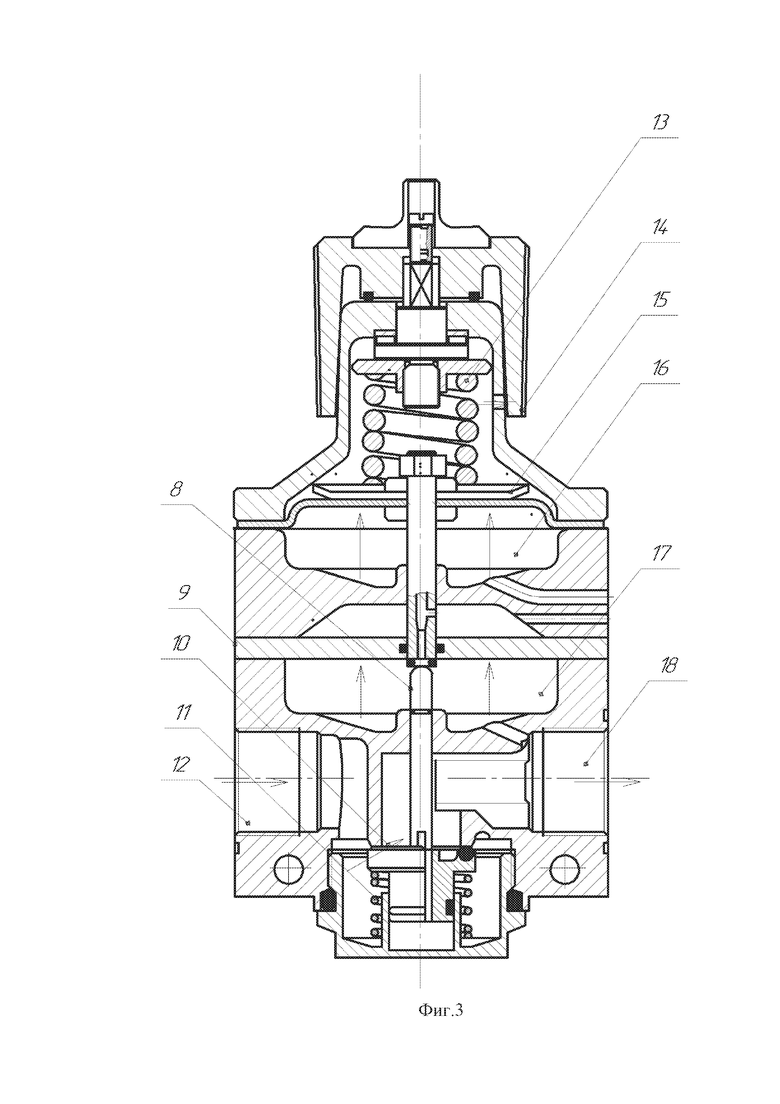
фиг.3 - пневматический усилитель;
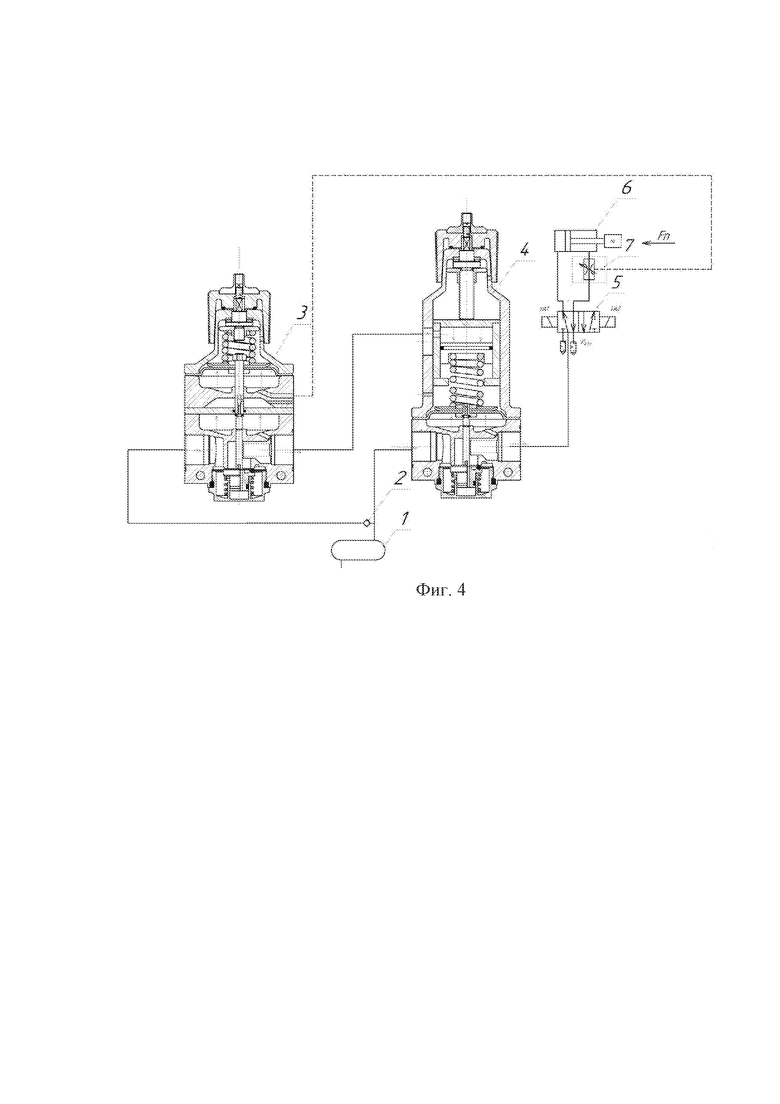
фиг.4 - представлена схема адаптивного пневматического привода с обратной пневматической связью с подключением клапана давления и пневматического усилителя.
Адаптивный пневматический привод с обратной пневматической связью питается от источника питания 1 и состоит из обратного клапана 2, соединеных между собой пневматического усилителя 3, расположенного слева внизу и клапана давления 4, расположенного справа и подключеного к двухпозиционномму трехлинейному пневмораспределителю 5, соединенному магистралями с поршневой и штоковой полостями пневматического цилиндра (пневмоцилиндра) 6, с подключенной поршневой полостью к пневматическому датчику скорости 7, расположенному под ним. В состав пневматического усилителя 3 входит корпус 9 в котором находятся несколько полостей, включая подмембранную полость 16 с мембраной 15 на которую воздействует, нагрузочная пружина 13 с рукояткой 14, входную полость 12, выходную полость 18, полость 17 с жесткой ограничетельной частью, соединеный с толкателем 8 в седёльном клапане (на чертеже не обозначен) подвижный элемент 10 на который воздействует возвратная пружина 11. В состав клапана давления 4 входит корпус 20 в котором находятся несколько полостей, включая подмембранную полость 29 с мембраной 28 сверху на которую воздействует нагрузочная пружина 27 с рукояткой 24, входную полость 23, выходную полость 30, соединенный с толкателем 19 в седёльном клапане (на чертеже не обозначен) подвижный элемент 21 на который снизу воздействует возвратная пружина 22 и подвижный цилиндр 25 с поршнем 26. В состав пневматического датчика скорости 7 входит дросселирующее устройство и встроенные в поток движущегося газа под прямым углом трубки Пито и пьезометра.
Работа привода происходит следующим образом
От источника питания 1 сжатый воздух под давлением проходит через клапан давления 4. Клапан давления 4 обладает внутренней обратной связью по давлению. Сверху на мембрану 28 действует сила нагрузочной пружины 27, которую можно изменять вращая рукоятку 24. Сжатый воздух попадает в подмембранную полость 29 через внутренний канал, соединяющий подмембранную полость 29 с выходной полостью 30 клапана давления 4. Поэтому снизу на мембрану 28 действует давление сжатого воздуха в выходной полости 30. Снизу через толкатель 19 на мембрану 28 действует также сила возвратной пружины 22. Если сила возвратной пружины 22 оказывается больше суммы других сил, мембрана 28 прогибается вниз и перемещает подвижный элемент 21 седёльного клапана. Через образовавшееся отверстие сжатый воздух проходит в выходную полость 30 и дальше в поршневую полость пневмоцилиндра 6. Седёльный клапан оказывается открытым ровно на столько, чтобы поддерживать необходимое давление в поршневой полости пневмоцилиндра 6 в зависимости от нагрузочной силы на выходном звене.
После сжатый воздух поступает в поршневую полость пневматического цилиндра 6. На выходное звено пневмоцилиндра 6 действует нагрузочная сила Fн. Из штоковой полости пневмоцилиндра 6 воздух проходит через оригинальный пневматический датчик скорости 7. В пневматическом датчике скорости 7 преобразуется полный скоростной напор в управляющий сигнал, который подается в подмембранную полость 16 пневматического усилителя 3. Пневмоусилитель 3 также, обладает обратной связью по давлению и предназначен для увеличения давления управления от пневматического датчика скорости 7.
Если нагрузочная сила Fн на выходном звене пневмоцилиндра 6 возрастает, то cнижается скорость исполнительного механизма, повышается давление в поршневой и снижается давление в штоковой полостях пневмоцилиндра 6, падает скоростной напор в пневматическом датчике скорости 7; в пневматическом усилителе 3 понижается давление в подмембранной полости 16, в результате чего давление в выходной полости 18 повышается; в клапане давления 4 при повышении давления в подвижном цилиндре 25 увеличивается давление в выходной полости 30; при увеличении давления на выходе из клапана давления 4 повышается давление в поршневой полости пневмоцилиндра 6. В итоге скорость исполнительного механизма пневмоцилиндра 6 возрастает до настроенного значения.
Если нагрузочная сила Fн на выходном звене пневмоцилиндра 6 падает, то увеличивается скорость исполнительного механизма, в процессе адаптации привода уменьшается давление в поршневой полости пневмоцилиндра 6 и скорость исполнительного механизма стабилизируется.
В совокупности все устройства адаптивного пневматического привода дают возможность получения информации об изменении скорости движения выходного звена пневмоцилиндра и преобразуют полученную информацию в управляющий сигнал, который изменяет нагрузочную силу пневмоцилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| ПНЕВМОИМПУЛЬСНОЕ УСТРОЙСТВО | 2009 |
|
RU2413967C1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| Устройство для управления пневматическим уравновешивающим стреловым подъемником | 1984 |
|
SU1328279A1 |
| Пневмопривод | 1989 |
|
SU1665114A1 |
| Пневматический инъектор | 1983 |
|
SU1196008A1 |
| ПНЕВМАТИЧЕСКИЙ МНОГОДОЗОВЫЙ БЕЗЫГОЛЬНЫЙ ИНЪЕКТОР | 2003 |
|
RU2241413C1 |


Изобретение относится к области пневматических приводов, применяемых в силовых и вспомогательных механизмах и машинах технологического оборудования, где требуется синхронная работа двух и более пневмоцилиндров, способных адаптироваться к переменной нагрузочной силе на выходном звене. Привод содержит пневмоцилиндр, пневмораспределитель, пневматический датчик скорости, клапан давления, пневматический усилитель и обратный клапан, клапан давления дополнительно содержит подвижный цилиндр с поршнем, пневматический усилитель содержит корпус, разделенный на две полости, одна из которых, подмембранная полость с мембраной, предназначена для подачи в нее управляющего сигнала от датчика скорости. Технический результат заключается в стабилизации скорости движения механизмов и машин технологического оборудования. 2 з.п. ф-лы, 4 ил.
1. Адаптивный пневматический привод с обратной пневматической связью, включающий пневмоцилиндр, пневмораспределитель, отличающийся тем, что в его состав входит пневматический датчик скорости, клапан давления, пневматический усилитель и обратный клапан.
2. Адаптивный пневматический привод с обратной пневматической связью по п. 1, отличающийся тем, что клапан давления дополнительно содержит подвижный цилиндр с поршнем.
3. Адаптивный пневматический привод с обратной пневматической связью по п.1, отличающийся тем, что пневматический усилитель содержит корпус, разделенный на две полости, одна из которых, подмембранная полость с мембраной, предназначена для подачи в нее управляющего сигнала от датчика скорости.
| US 4889036 A, 26.12.1989 | |||
| СПОСОБ И УСТРОЙСТВО ОТОБРАЖЕНИЯ НА ОСНОВЕ OLED | 2018 |
|
RU2738040C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2241867C2 |
| Станок для изготовления штырьковых пустотелых контактных клемм | 1949 |
|
SU84923A1 |
| ПНЕВМОПРИВОД | 2009 |
|
RU2439383C2 |

