(Л
cz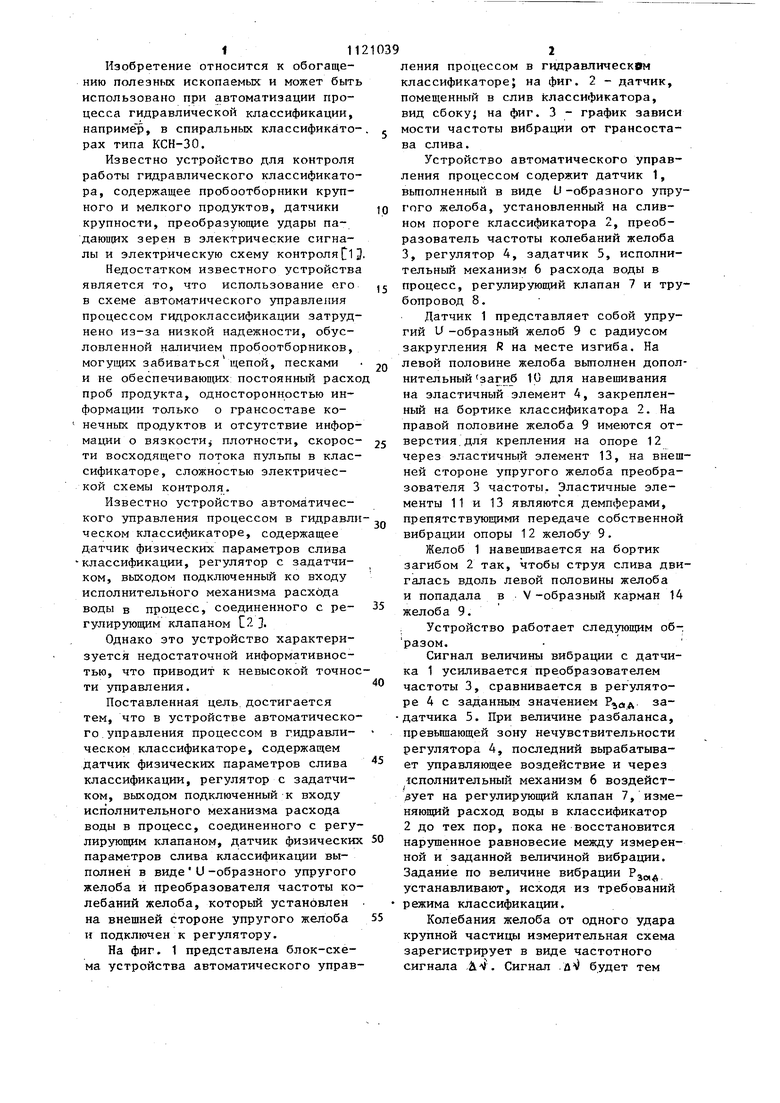
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования процесса гидравлической классификации | 1979 |
|
SU862985A1 |
| Способ автоматического регулирования процесса гидравлической классификации | 1985 |
|
SU1344417A1 |
| Многокамерный гидравлический классификатор | 1981 |
|
SU963562A1 |
| Способ регулирования процесса гидрав-личЕСКОй КлАССифиКАции МАТЕРиАлА ВгОРизОНТАльНОМ пОТОКЕ | 1979 |
|
SU839564A1 |
| Гидравлический классификатор для разделения частиц суспензии по их размеру | 2021 |
|
RU2771771C1 |
| Способ гидравлической классификации материала и гидравлический классификатор для его осуществления | 1977 |
|
SU948455A1 |
| Способ гидравлической вибрационной классификации и устройство для его осуществления | 1988 |
|
SU1839108A1 |
| Способ классификации материала и устройство для его осуществления | 1978 |
|
SU774596A1 |
| СПИРАЛЬНЫЙ КЛАССИФИКАТОР | 2001 |
|
RU2207909C1 |
| ФЛОТАЦИОННЫЙ КЛАССИФИКАТОР | 2015 |
|
RU2608120C2 |
УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ В ГИДРАВЛИЧЕСКОМ Ю1АССИФНКАТОРЕ, содержащее датчик физических параметров слива классификации, регулятор с задатчиком, выходом подключенный к входу исполнительного механизма расхода воды в процесс,, соединенного срегулирующим клапаном, отличающееся тем, что, с целью повышения надежности устройства, датчик физических параметров слива классификации выполнен в виде и-образного упругого желоба и преобразователя частоты колебаний желоба, которьш установлен на внешней стороне упругого желоба и подключен к регулятору.
Bffda
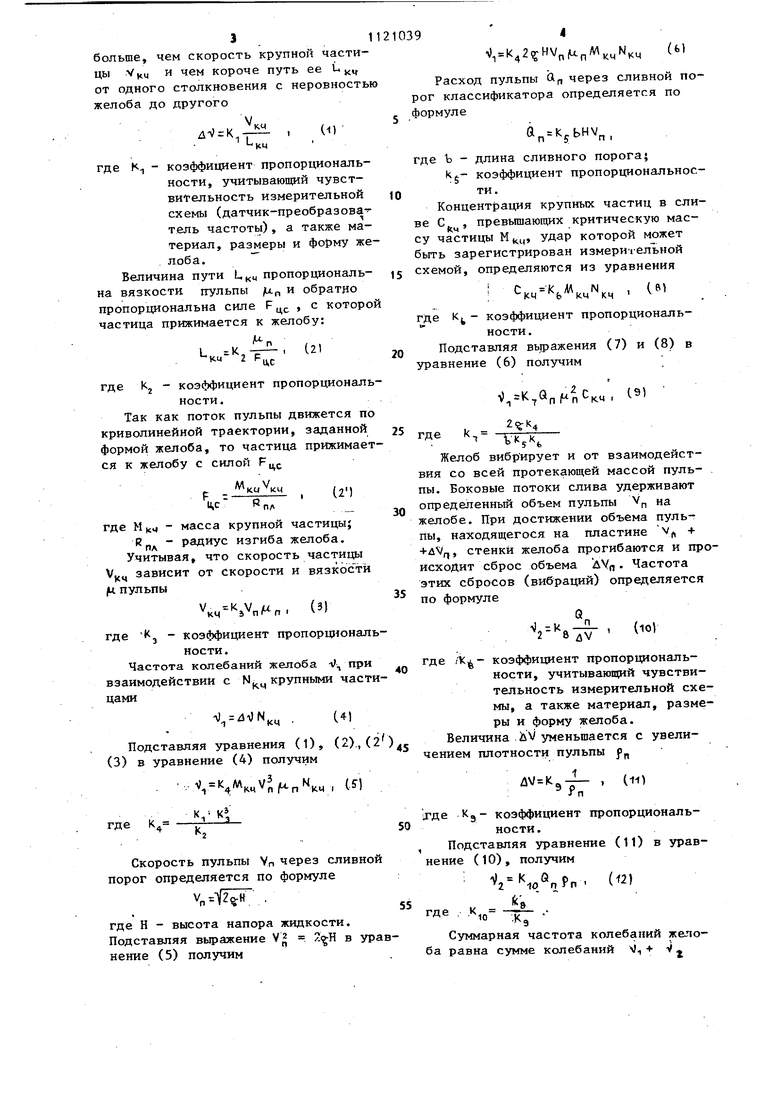
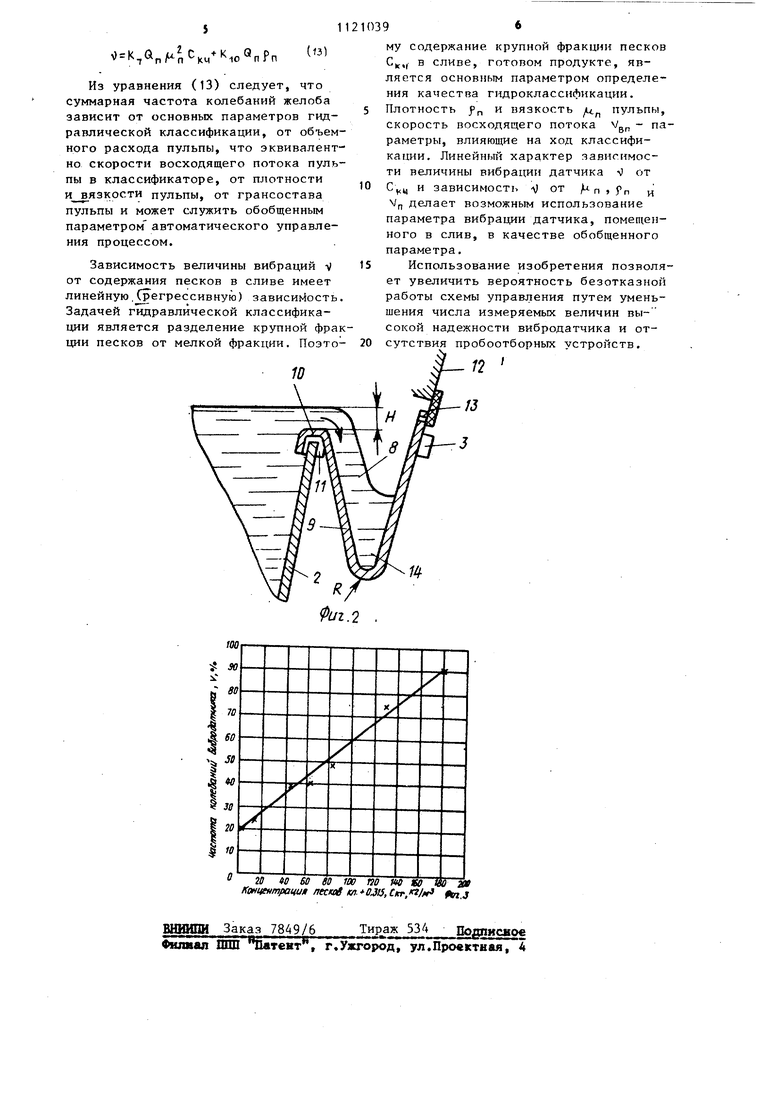
v 111 Изобретение относится к обогащению полезных ископаемых и может быть использовано при автоматизации процесса гидравлической классификации, например, в спиральных классификаторак типа КСН-30. Известно устройство для контроля работы гидравлического классификатора, содержащее пробоотборники крупного и мелкого продуктов, датчики крупности, преобразующие удары падающих зерен в электрические сигналы и электрическую схему контроля tl Недостатком известного устройства является то, что использование ого в схеме автоматического управления процессом гидроклассификации затруднено из-за низкой надежности, обусловленной наличием пробоотборников, могущих забиваться щепой, песками и не обеспечивающих: постоянный расхо проб продукта, односторонностью информации только о грансоставе ко нечных продуктов и отсутствие информации о вязкости плотности, скороети восходящего потока пульпы в классификаторе, сложностью электрической схемы контроля. Известно устройство автоматического управления процессом в гидравли ческом классификаторе, содержащее датчик физических параметров слива -классификации, регулятор с задатчиком, выходом подключенный ко входу исполнительного механизма расхода воды в процесс, соединенного с регулирующим клапаном 3. Однако это устройство характеризуется недостаточной информативностью, что приводит к невысокой точнос ти управления. Поставленная цель, достигается тем, что в устройстве автоматического управления процессом в гидравлическом классификаторе, содержащем датчик физических параметров слива классификации, регулятор с задатчиком, выходом подключенный к входу исполнительного механизма расхода воды в процесс, соединенного с регулирующим клапаном, датчик физических параметров слива классификации выполнен в виде и-образного упругого желоба и преобразователя частоты колебаний желоба, которьй установлен на внешней стороне упругого желоба и подключен к регулятору. На фиг. 1 представлена блок-схема устройства автоматического управ ления процессом в гидравлическом классификаторе; на фиг. 2 - датчик, помещенный в слив классификатора, вид сбоку} на фиг. 3 - график зависи мости частоты вибрации от грансостава слива. Устройство автоматического управления процессом содержит датчик 1, выполненный в виде U-образного упругого желоба, установленный на сливном пороге классификатора 2, преобразователь частоты колебаний желоба 3, регулятор 4, задатчик 5, исполнительньй механизм 6 расхода воды в процесс, регулирующий клапан 7 и трубопровод 8. Датчик 1 представляет собой упругий U -образный желоб 9 с радиусом закругления R на месте изгиба. На левой половине желоба выполнен дополнительный загиб 10 для навещивания на эластичный элемент А, закрепленный на бортике классификатора 2. На правой половине желоба 9 имеются отверстия, для крепления на опоре 12 через эластичный элемент 13, на внешней стороне упругого желоба преобразователя 3 частоты. Эластичные элементы 11 и 13 являются демпферами, препятствующими передаче собственной вибрации опоры 12 желобу 9. Желоб 1 навешивается на бортик загибом 2 так, чтобы струя слива двигалась вдоль левой половины желоба и попадала в V -образный карман 14 желоба 9. Устройство работает следующим об-: разом. Сигнал величины вибрации с датчика 1 усиливается преобразователем частоты 3, сравнивается в регуляторе 4 с заданным значением . задатчика 5. При величине разбаланса, превьшающей зону нечувствительности регулятора 4, последний вырабатывает зщравляющее воздействие и через 1сполнительный механизм 6 воздействует на регулирующий клапан 7, изменяющий расход воды в классификатор 2 до тех пор, пока не восстановится нарушенное равновесие между измеренной и заданной величиной вибрации. Задание по величине вибрации устанавливают, исходя из требований режима классификации. Колебания желоба от одного удара крупной частицы измерительная схема зарегистрирует в виде частотного сигнала Ал. Сигнал .д) будет тем 3 больше, чем скорость крупной частии чем короче путь ее U от одного столкновения с неровность желоба до другого , . где К - коэффициент пропорциональности, учитывающий чувствительность измерительной схемы (датчик-преобразователь частоты), а также материал, размеры и форму же лоба. Величина пути L. пропорциональна вязкости тгульпы и™ и обратно .пропорциональна силе Р ц которо частица прижимается к желобу: F где Kj - коэффициент пропорциональ ности. Так как поток пульпы движется по криволинейной траектории, заданной формой желоба, то частица прижимает ся к желобу с силой Рщ. где М цд - масса крупной частицы; R - радиус изгиба желоба. Учитывая, что скорость частицы V зависит от скорости и вязкости 1 пульпы кч . (и где - коэффициент пропорциональ ности . Частота колебаний желоба V, при взаимодействии с N, крупными части л) 4ON Подставляя уравнения (1), (2)., (2 (3) в уравнение (4) получим . V ,UnN,, (.5 Скорость пульпы Vn через сливной порог определяется по формуле где Н - высота напора жидкости. Подставляя выражение V 2(Н в урав нение (5) получим 9 1 ( Расход пульпы п через сливной порог классификатора определяется по формуле . где Ъ - длина сливного порога; kg- коэффициент пропорциональности. Концентрация крупных частиц в слипревьпиающих критическую массу частицы М f удар которой может быть зарегистрирован измерительной схемой, определяются из уравнения г -k- М N ( R Ku ku ifu о к-ч .ч где к, - коэффициент пропорциональU. ности. Подставляя вьтражения (7) и (8) в уравнение (6) получим ,, i Т1ФЧ Желоб вибрирует и от взаимодействия со всей протекающей массой пуль- . пы. Боковые потоки слива удерживают определенный объем пульпы V на желобе. При достижении объема пульпы, находящегося на пластине v - +AV™, стенки желоба прогибаются и происходит сброс объема ДУп. Частота этих сбросов (вибраций) определяется по формуле Л-- tiov где коэффициент пропорциональности, учитывающий чувствительность измерительной схемы, а также материал, размеры и форму желоба. Величина iiV уменьшается с увеличением плотности пульпы f 1где коэффициент пропорциональности. Подставляя уравнение (11) в уравнение (10), получим 2 io«nPn. («) Суммарная частота колебаний желоба равна сумме колебаний rJ, V
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ переработки металлургическихшлАКОВ | 1979 |
|
SU806123A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического управления процессом гидроклассификации | 1979 |
|
SU854443A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
