Изобретение относится к дорожному строительству из сборных покрытий, а именно к машинам для укладки плит на заранее подготовленное основание нри сооружении сборных железобетонных покрытий дорог, аэродромов, площадей, тротуаров и т.д., и предназначено для транспортировки плит к месту укладки и их вибропосадки.
Наиболее распространена укладка плит сборных железобетонных покрытий с помощью подъемных кранов, выбираемых в соответствии с массой и размерами плит.
ГТри такой укладке плит сложно обеспечить качество укладки, а именно одинаковую плотность насыпного основания под плитами, уровень плит и обеспечить необходимые зазорь 1 между плитами, а также кроме постоянной работы крана.требуется не менее двух стропольиликов.
Известна для укладки плиток в покрытие , включающая базовую машипу, контейнер для плиток, рабочий орган для подачи плиток па основание и виброплиту 111.
Недостатками данной машины являются ее сложность,. наличие грузоподъемных средств для загрузки контейнера плитками и невозможность укладки массивных плит большого размера, так как при наличии контейнера для плит требуется массивная базовая машина, которая, будучи загруженной, дает большие нагрузки на основание.
Наиболее близким к предлагаемому является укладчик плит, содержащий самоходное шасси с двигателем и установленным на ней сменным контейнером, .механизм выдачи плит в виде закрепленных на штоках гидроцилиндров толкателей, рычажный механизм вертикального перемещения плит, механизм поперечного перемещения плит на раме, механизм укладки плит и .механизм вибропосадки плит в виде пневматического виброкатка 2.
Недостатками известного укладчика являются его сложность, необходимость постоянного использования грузонодъемпых средств для загрузки плитами сменного контейнера и его установки на укладчик, значительная металлоемкость машины, несупхей на себе контейнер с плитами. Нри вибропосадке плит происходит доуплотнение основания, что может привести к различным уровням поверхностей уложенных плит в случае неравномерного уплотнения основания. Укладка крупных плит вызовет технические сложности при разработке машины из-за большой массы укладчика, загруженного плитами, и возможности вибропосадки плит с большими опорными площадями.
Цель изобретения - угфощение конструкции укладчика.
Ноставленная цель достигается тем, что в укладчике плит, включающем рамное основание, устройство для удержания плиты с захватами, вибровозбудители для посадки плит на предварительно подготовленное основание и привод, устройство для удержания плиты выполнено в виде те пескопических рычагов с шарнирно соединенными опорами захватов, расположенных под рамным основанием, и щпренгельных систем в виде тяг и стоек, установленных на рамном основании в поперечных плоскостях
захватов и соединенных с последними тягами, причем одна из тяг каждой щпренгельной системы имеет механизм изменения ее длины, а вибровозбудители установлены по краям основания укладчика в продольных
плоскостя, расположенных между опорами захватов и стойками шпренгельных систем, и имеют механизмы изменения углов наклона.
Для обеспечения наезда укладчика на плиту он снабжен поперечными балками и
размещенными по их периметру катками, оси которых шарнирно соединены между собой в бесконечную цепь.
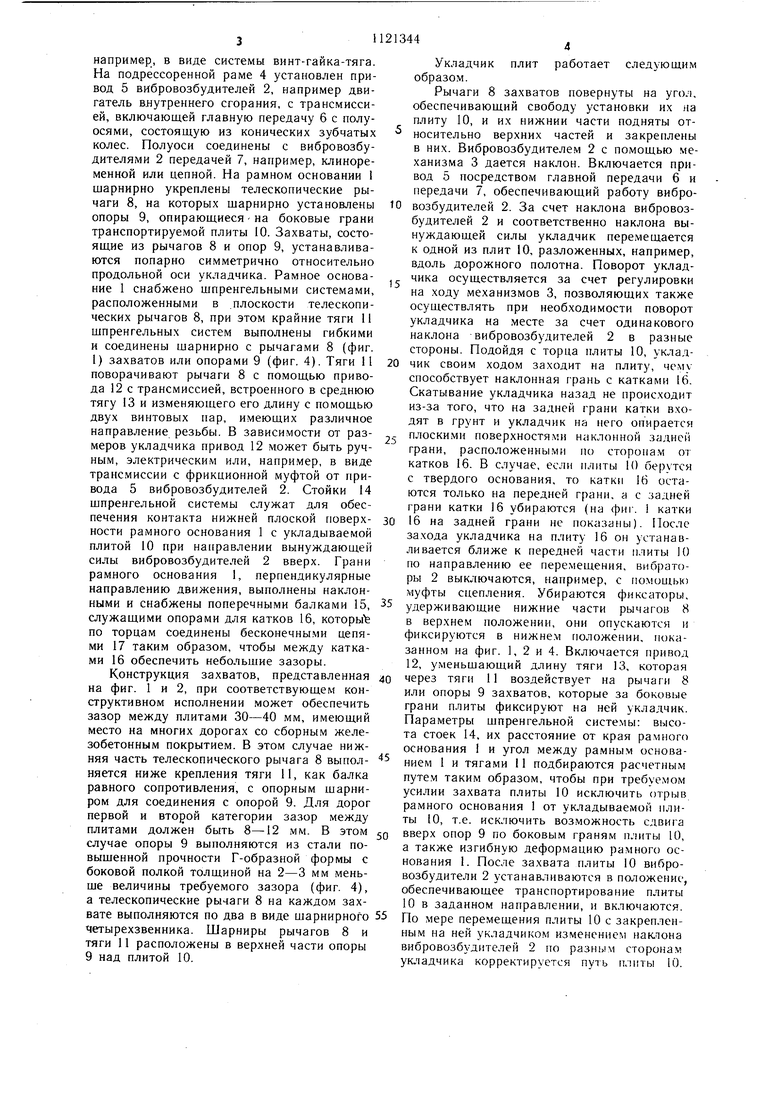
Для обеспечения наезда укладчика на плиту в его рамном основании грани, перпендикулярные направлению движения, выполнены наклонными и снабжены поперечными балками и катками, соединенными по торцам бесконечными цепями.
Шпренгельная система позволяет увеличить силу захвата при направлении вынуждающей силы вверх, чем повышается надежность закрепления опор зажимов на плите и исключается отрыв укладчика от плиты.
Механизмы изменения угла наклона вибровозбудителей с независимыми системами их управления обеспечивают требуемое для вибраторов с каждой стороны укладчика изменение направления их вынуждающих сил, что необходимо для осуществления поворота и изменения направления
движения в процессе транспортирования плиты.
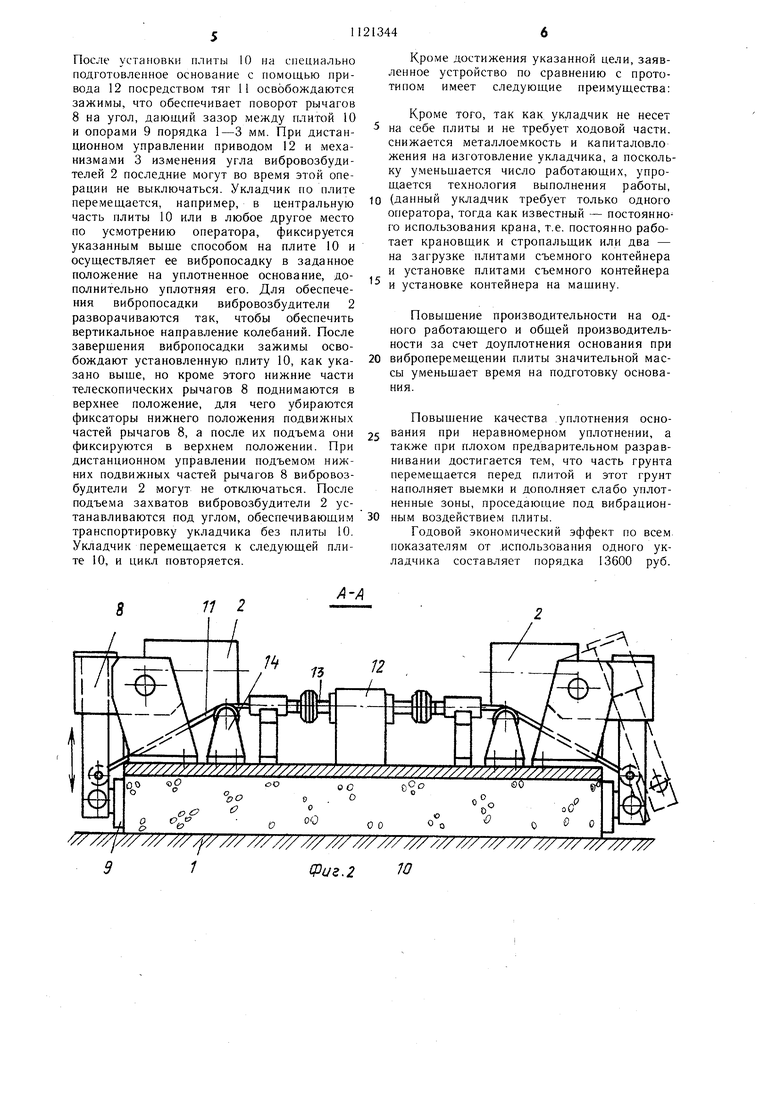
На фиг. 1 изображен укладчик плит, закрепленный на укладываемой плите, общий вид; на фиг. 2 - разрез А-А на фиг. 1 (без двигателя привода вибраторов и рамы, на которой установлен двигатель); на фиг. 3 - катки наклонной грани рамного основания; на фиг. 4 - вариант захватного устройства для плит, устанавливаемых с малыми зазорами, например, дорог первойвторой категорий.
Укладчик плит имеет рамное основание 1, на котором по краям, направленным по ходу устройства, вибровозбудители 2 направленного действия, количество которых должно быть четным, например два,
установлены симмефрично относительно продольной оси укладчика. Вибровозбудители 2 снабжены механизмами 3 изменения угла наклона корпусов вибровозбудителей 2,
например, в виде системы винт-гаика-тяга. На подрессоренной раме 4 установлен привод 5 вибровозбудителей 2, например двигатель влутреннего сгорания, с трансмиссией, включающей главную передачу 6 с полуосями, состоящую из конических зубчатых колес. Полуоси соединены с вибровозбудителями 2 передачей 7, например, клиноременной или цепной. На рамном основании 1 щарнирно укреплены телескопические рычаги 8, на которых щарнирно установлены опоры 9, опирающиеся - на боковые грани транспортируемой плиты 10. Захваты, состоящие из рычагов 8 и опор 9, устанавливаются попарно симметрично относительно продольной оси укладчика. Рамное основание 1 снабжено щпренгельными системами, расположенными в .плоскости телескопических рычагов 8, при этом крайние тяги 11 шпренгельных систем выполнены гибкими и соединены щарнирно с рычагами 8 (фиг. 1) захватов или опорами 9 (фиг. 4). Тяги 11 поворачивают рычаги 8 с помощью привода 12 с трансмиссией, встроенного в среднюю тягу 13 и изменяющего его длину с помощью двух винтовых пар, имеющих различное направление резьбы. В зависимости от размеров укладчика привод 12 может быть ручным, электрическим или, например, в виде трансмиссии с фрикционной муфтой от привода 5 вибровозбудителей 2. Стойки 14 щпренгельной системы служат для обеспечения контакта нижней плоской поверхности рамного основания 1 с укладываемой плитой 10 при направлении вынуждающей силы Бибровозбудителей 2 вверх. Грани рамного основания 1, перпендикулярные направлению движения, выполнены наклонными и снабжены поперечными балками 15, служащими опорами для катков 16, которыЪ по торцам соединены бесконечными цепями 17 таким образом, чтобы между катками 16 обеспечить небольшие зазоры.
Конструкция захватов, представленная на фиг. 1 и 2, при соответствующем конструктивном исполнении может обеспечить зазор между плитами 30-40 мм, имеющий место на многих дорогах со сборным железобетонным покрытием. В этом случае нижняя часть телескопического рычага 8 выполняется ниже крепления тяги 11, как балка равного сопротивления, с опорным щарниром для соединения с опорой 9. Для дорог первой и второй категории зазор между плитами должен быть 8-12 мм. В этом случае опоры 9 выполняются из стали повыщенной прочности Г-образной формы с боковой полкой толщиной на 2-3 мм меньще величины требуемого зазора (фиг. 4), а телескопические рычаги 8 на каждом захвате выполняются по два в виде щарнирного четырехзвенника. Шарниры рычагов 8 и тяги 11 расположены в верхней части опоры 9 над плитой 10.
Укладчик плит работает следующим образом.
Рычаги 8 захватов повернуты на угол, обеспечивающий свободу установки их на плиту 10, и их нижний части подняты от носительно верхних частей и закреплены в них. Вибровозбудителем 2 с помощью механизма 3 дается наклон. Включается привод 5 посредством главной передачи 6 и передачи 7, обеспечивающий работу виброtO возбудителей 2. За счет наклона вибровозбудителей 2 и соответственно наклона вынуждающей силы укладчик пере1мещается к одной из плит 10, разложенных, например, вдоль дорожного полотна. Поворот уклад. чика осуществляется за счет регулировки на ходу механизмов 3, позволяющих также осуществлять при необ.ходимости поворот укладчика на месте за счет одинакового наклона вибровозбудителей 2 в разные стороны. Подойдя с торца плиты 10, уклад20 чик своим ходом заходит на плиту, чему способствует наклонная грань с катками 16. Скатывание укладчика назад не происходит из-за того, что на задней грани катки входят в грунт и укладчик на него опирается J плоскими поверхностями наклонной задней грани, расположенными по сторонам от катков 16. В случае, если нлиты К) берутся с твердого основания, то катки 16 остаются только на передней грани, а с задней грани катки 16 убираются (на фиг. 1 катки 0 16 на задней грани не показаны). После захода укладчика на плиту 16 он устанавливается ближе к передней части плиты 10 по направлению ее перемещения, вибраторы 2 выключаются, например, с помощью муфты сцепления. Убираются фиксаторы, 5 удерживающие нижние части рычагов 8 в верхнем положении, они опускаются и фиксируются в нижне.м положении, показанном на фиг. 1, 2 и 4. Включается привод 12, уменьщающий длину тяги 13, которая 0 через тяги 11 воздействует на рычаги 8 или опоры 9 захватов, которые за боковые грани плиты фиксируют на ней укладчик. Параметры щпренгельной системы: высота стоек 14, их расстояние от края рамного основания 1 и угол между рамным основанием 1 и тягами 11 подбираются расчетным путе.м таким образом, чтобы при требуемом усилии захвата плиты 10 исключить отрыв рамного основания 1 от укладываемой нлиты 10, т.е. исключить возможность сдвига 0 вверх опор 9 по боковым граням плиты 10, а также изгибную деформацию рамного основания 1. После захвата плиты 10 вибровозбудители 2 устанавливаются в положение, обеспечивающее транспортирование плиты 10 в заданном направлении, и включаются. По мере перемещения плиты 10 с закрепленным на ней укладчиком изменением наклона вибровозбудмтелей 2 по разным сторонам укладчика корректируется путь плиты 10. После установки плиты 10 на специально подготовленное основание с помощью привода 12 посредством тяг И освобождаются зажимы, что обеспечивает поворот рычагов 8 на угол, дающий зазор между плитой 10 и опорами 9 порядка 1--3 мм. При дистанционном управлении приводом 12 и механизмами 3 изменения угла вибровозбудителей 2 последние могут во время этой операции не выключаться. Укладчик по плите перемещается, например, в центральную часть плиты 10 или в любое другое место по усмотрению оператора, фиксируется указанным выше способом на плите 10 и осуществляет ее вибропосадку в заданное положение на уплотненное основание до- ,5 полнительно уплотняя его. Для обеспечения вибропосадки вибровозбудители 2 разворачиваются так, чтобы обеспечить вертикальное направление колебаний. После завершения вибропосадки зажимы осво божТа ю7установленн7юплит7То,как ука- 20 зано выше, но кроме этого нижние части телескопических рычагов 8 поднимаются в верхнее положение, для чего убираются фиксаторы нижнего положения подвижных частей рычагов 8, а после их подъема они 25 фиксируются в верхнем положении. При дистанционном управлении подъемом нижних подвижных частей рычагов 8 вибровозбудители 2 могут не отключаться. После подъема захватов вибровозбудители 2 устанавливаются под углом, обеспечивающим 30 транспортировку укладчика без плиты 10. Укладчик перемещается к следующей плите 10, и цикл повторяется.
Фиг. 2 5 10
//7/////////////// /////////
70 Кроме достижения указанной цели, заявленное устройство по сравнению с прототипом имеет следующие преимущества: Кроме того, так как укладчик не несет на себе плиты и не требует ходовой части, снижается металлоемкость и капиталовло жения на изготовление укладчика, а поскольку уменьщается число работающих, упрощается технология выполнения работы, (данный укладчик требует только одного оператора, тогда как известный - постоянно го использования крана, т.е. постоянно работает крановщик и стропальщик или два - на загрузке плитами съемного контейнера и установке плитами съемного контейнера „ установке контейнера на мащину. Повышение производительности на одного работающего и общей производительности за счет доуплотнения основания при виброперемещении плиты значительной массы уменьшает время на подготовку основания. Повышение качества уплотнения осно Р неравномерном уплотнении, а также при плохом предварительном разравнивании достигается тем, что часть грунта перемещается перед плитой и этот грунт наполняет выемки и дополняет слабо уплотненные зоны, проседающие под вибрационным воздействием плиты. Годовой экономический эффект по всем показателям от использования одного укладчика составляет порядка 13600 руб.
IS
15
7
(Ри.З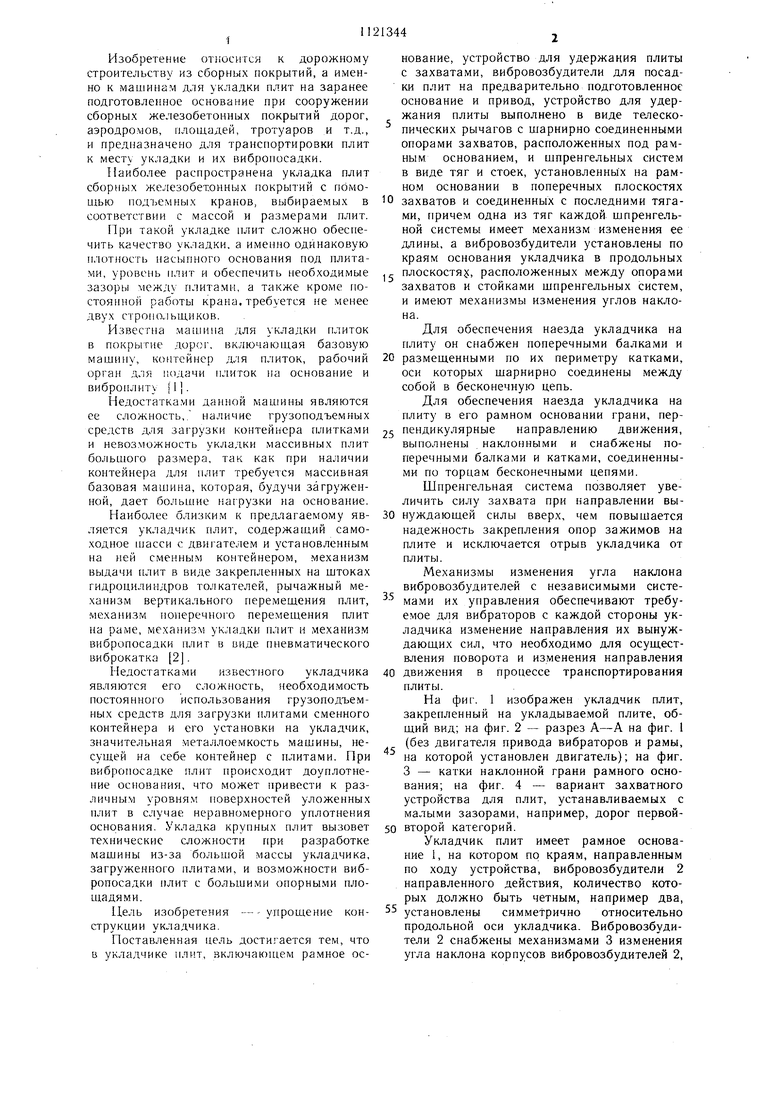
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесной рабочий орган укладчика плит | 1990 |
|
SU1759984A1 |
| Укладчик плит | 1976 |
|
SU657108A1 |
| Укладчик плиток | 1983 |
|
SU1110849A1 |
| Укладчик плит | 1977 |
|
SU753974A2 |
| МАШИНА ДЛЯ ОБРАЗОВАНИЯ БЕТОННОГО НОКРЫТИЯ ДОРОГ | 1971 |
|
SU310001A1 |
| Машина для укладки тротуарной плитки и фигурных элементов мощения | 1987 |
|
SU1413173A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОХОДНЫЙ ДОРОЖНЫЙ АГРЕГАТ, ДОРОЖНАЯ ПЛИТА И СКОРОСТНОЙ СПОСОБ СТРОИТЕЛЬСТВА ДОРОГИ | 2011 |
|
RU2485241C1 |
| Машина для укладки керамогранитной плитки | 2017 |
|
RU2652207C1 |
| Агрегат для укладки тротуарных плиток | 2020 |
|
RU2740596C1 |
| Укладчик плиток | 1978 |
|
SU800277A1 |
1. УКЛАДЧИК ПЛИТ, включающий рамное основание, устройство для удержания плиты с захватами, вибровозбудители для посадки плит на предварительно подготовленное основание и привод, отличающийся тем, что, с целью упрощения конструкции, устройство для удержания плиты выполнено в виде телескопических рычагов с щарнирно соединенными опорами захватов, расположенных под рамным основанием, и щпренгельных систем в виде тяг и стоек, установленных на рамном основании в поперечных плоскостях захватов и соединенных с последними тягами, причем одна из тяг каждой щпренгельной системы имеет механизм изменения ее длины, а вибровозбудители установлены по краям основания укладчика в продольных плоскостях, расположенных между опорами захватов и стойками щпренгельных Систем, и имеют механизмы изменения углов наклона. 2. Укладчик по п. 1, отличающийся тем, что он снабжен поперечными ба.жами и размещенными по их периметру катками, оси которых щарнирно соединены между собой в бесконечную цепь.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МАШИНА ДЛЯ УКЛАДКИ ПЛИТОК В ПОКРЫТИЕ ДОРОГ, | 0 |
|
SU298723A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Укладчик плит | 1976 |
|
SU657108A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
