(54) УКЛАДЧИК ПЛИТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Укладчик плит | 1976 |
|
SU657108A1 |
| Укладчик плит | 1971 |
|
SU503976A1 |
| Автомат для сборки пакетов магнитопроводов электрических машин | 1988 |
|
SU1534645A1 |
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Агрегат для выполнения комплекса работ по устройству бордюров автодорог | 2021 |
|
RU2777314C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ ПОЛОСОВОГО ШПОНА | 1995 |
|
RU2064862C1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Укладчик материала в бунт | 1989 |
|
SU1660625A1 |
| Установка для обработки изделий и устройство для закалки | 1983 |
|
SU1209722A1 |
| Самоходный многорядный картофелеуборочный комбайн | 1990 |
|
SU1811772A1 |

1
Изобретение относится к строительству, а и.менно к механизированной укладке плит на предварительно подготовленное основание при сооружении сборных покрытий тротуаров, дорог, площадей.
По основному авт. св. № 657108 известен укладчик плит, содержащий механизмы поперечного перемещения плит по направляющд1м полозьям, которые соединены с рамой посредством шарнирных тяг, причем во время укладки плит укладчик опирается на плиты через стойки, образующие винтовые пары, и на бащмаки с роликами, которые осуществляют окончательную посадку плит в основание 1.
Недостатком известного укладчика является то, что он не гарантирует беспрепятственного накатывания роликов, осуществляющих посадку на основание, на смежные края плит ступенчато сходящих с направляющих полозьев. Это снижает надежность работы укладчика. Установка известного укладчика при подготовке его к работе на бащмаки с роликами и опускание его при окончании укладки на ведущие колеса является трудоемкой операцией и производится путем ручного вращения винтовых пар образующих стойки переменной длины.
Цель изобретения - повыщение надежности работы укладчика и степени его механизации.
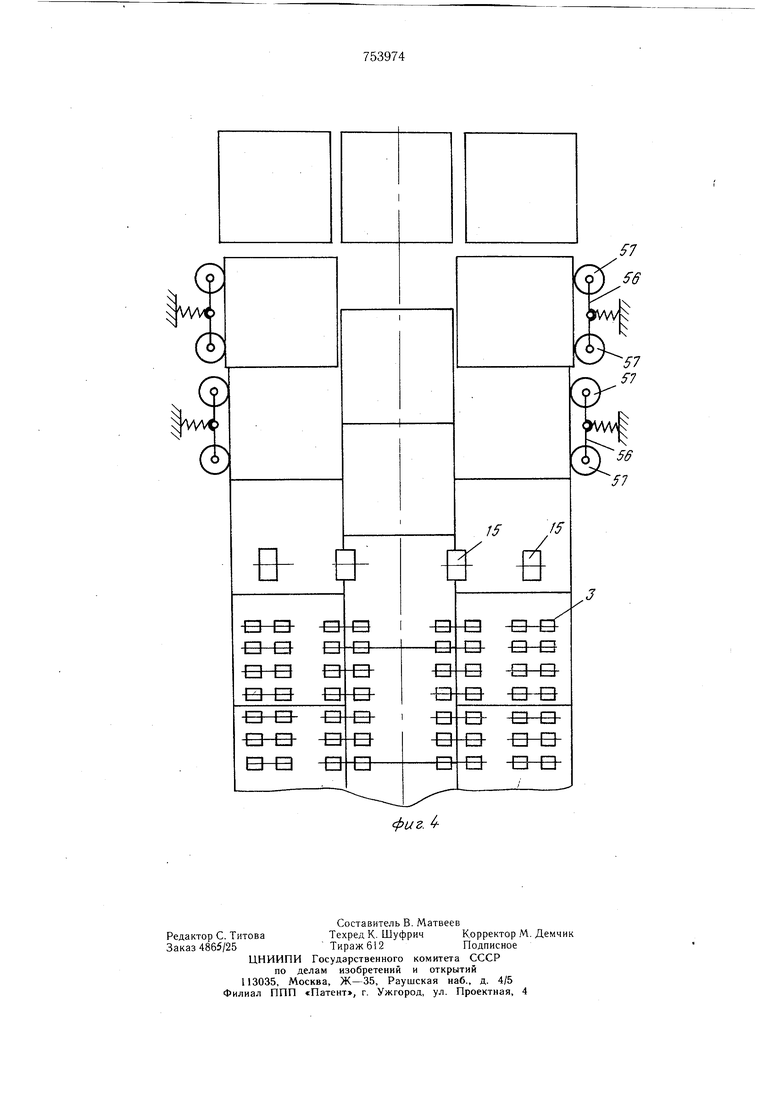
Поставленная цель достигается тем, что укладчик плит, содержащий самоходное щасси с двигателя, рамой и установленным на ней сменным контейнером, механизм выдачи плит в виде закрепленных на щтоках гидроцилиндров толкателей, механизм вертикаль10ного перемещения плит в виде щарнирно закрепленных на раме Г-образных приводных рычагов, свободные концы которых выполнены с разделительной стенкой, и установленных на оси приводных отсекателей с выступами для фиксации плит, механизм
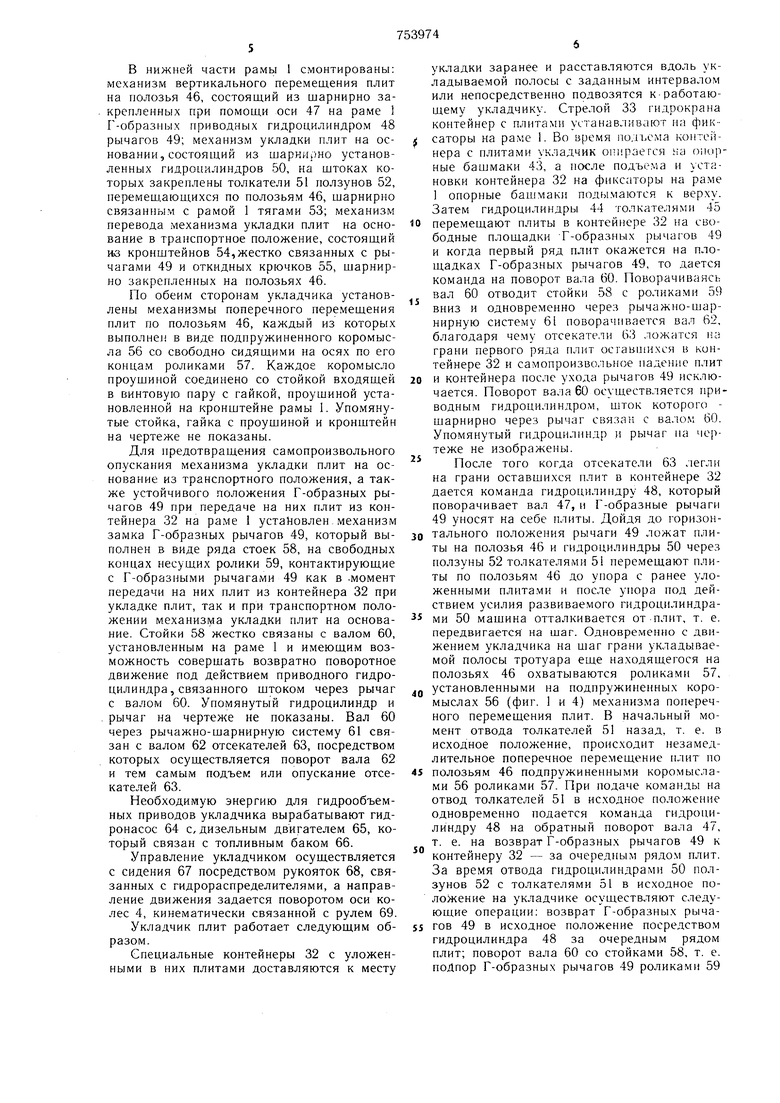
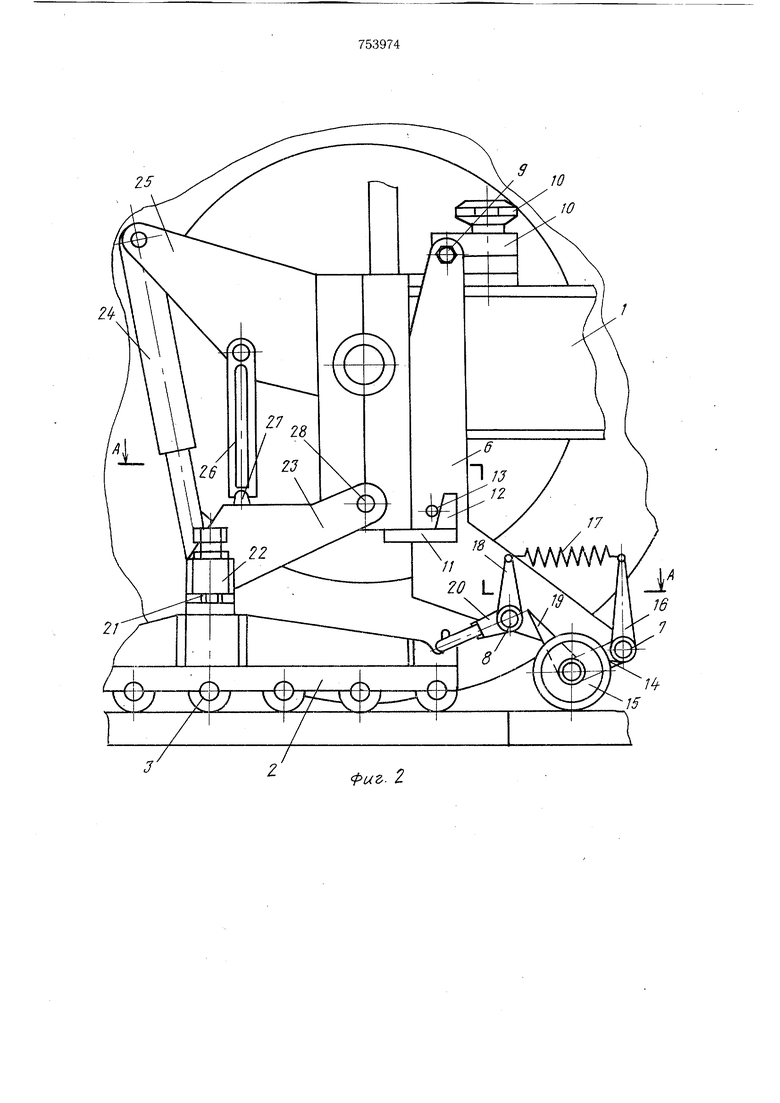
15 укладки плит на основание, выполненный в виде смонтированных под рамой на уровне основания направляющих полозьев с ползунами, соединенными со штоками гидроцилиндров, и механизм вибропосадки плит 20 в виде бащмаков с роликами, катящимися по уложенным плитам, механизмы поперечного перемещения плит в виде подпружиненного коромысла с проушиной и свободно сидящими на осях по его концам роликами - снабжен установленными на раме механизмами принудительного утапливания плит, вынолненьыми в виде кронштейнов с шарнирно закрепленными по обеим их сторонам коромыслами, несущими на одном плече прижимные ролики, а другим связанные посредством пружины с кронштейнами. Укладчик снабжен предохранительным гидравлическим механизмом в виде параллельно установленных гидроцилиндров, шарнирно соединенных с ними кронштейнов и закрепленных на раме спаренных рычагов, ось которых установлена на торце рамы, причем каждый кронштейн снабжен шарнирной стойкой, имеюшей на свободном конце фигурный паз. На фиг. 1 изображен общий вид укладчика плит; на фиг. 2 - выносной элемент на фиг. 1; на фиг. 3 - разрез А-А фиг. 2; на фиг. 4 - план укладки и расположение роликов механизма утапливания плит, роликов башмаков и механизмов поперечного перемещения плит. Укладчик плит включает в себя раму 1, опирающуюся на уложенные плиты через бащмаки 2 роликами 3 и на ось передних колес 4, контактирующими с основанием. Ролики 3 во время качения по уложенным плитам осуществляют их посадку в основание и одновременно обеспечивают одинаковый уровень смежных краев. Задние колеса 5 неесколько подняты над уровнем укладываемой полосы и плит не касаются. Для беспрепятственного набегания роликов 3 на укладываемые плиты перед каждой парой башмаков 2 установлено по механизму принудительного утапливания плит, каждый из которых включает в себя кронштейны 6 Г-образной формы, охватывающие боковые балки рамы 1. В нижней части кронштейны б (фиг. 1, 2 и 3) жестко соединены между собой двумя осями 7 и 8, а в верхней - осью 9. Требуемое рабочее положение механизмов принудительного утапливания плит фиксируется винто-рычажными зажимами 10, которые зажимают оси 9 каждого механизма, а также ловителя 11 в направляющие пазы которых входят кронштейны 6 и клинового ограничителя 12, расположенного понаружным сторонам кронщтейна 6 на каждом ловителе 11, контактирующего с выступом 13. По концам оси 7 свободно установлены коромысла 14, на одном плече, несущие по прижимному ролику 15, контактирующему с укладываемыми плитами, а другим плечом 16 связаны посредством пружин 17 с кронштейном 18. Коромысло 14 снабжено упором 19, который ограничивает коромысло от чрезмерного поворота при переводе всего механизма утапливания плит в транспортное положение. На свободные концы оси 8 проушинами установлены зацепы 20, служа шие в качестве промежуточного соединительного элемента между механизмом утапливания плит и башмаками 2. При укладке плит укладчик опирается на башмаки 2 посредством стоек 21, образующих винтовую пару с кронштейнами 22, которые жестко связаны со спаренными рычагами 23, свободные концы которых через ось связаны со штоком гидроцилиндра 24. На каждый спаренный рычаг 23 установлено по одному цилиндру 24,который своей проушиной закреплен между кронштейнами 25, жестко скрепленными с боковыми балками рамы 1, причем для предотвращения самопроизвольного опускания укладчика на колеса 5, каждый кронштейн 25 снабжен шарнирной стойкой 26 на свободном конце несущей фигурный паз, взаимодействующий с выступом 27. Каждая пара спаренных рычагов 23 соединена между собой осью 28, установленной в проушине каждой боковой балки рамы 1. Для подвешивания башмаков 2 и механизмов принудительного утапливания плит при приведении укладчика в транспортное положение на раме 1 закреплена стойка 29, несущая кронштейны 30 и 31. Для подъема и установки на раму укладчика кронштейна 32 с тротуарными плитами на раме 1 передней части укладчика установлен специальный гидрокран, который включает в себя дугообразную стрелу 33 с крановой подвеской 34. Крановая подвеска 34 несет траверсу и стропы. Дугообразная стрела 33 через проушину соединена с поворотной стойкой 35, которая через свой кронштейн опирается на оси катков 36. Катки 36 опираются на полукруговую опору 37. На площадке кронштейна поворотной стойки 35 шарнирно посредством проушин установлены параллельно два гидроцилиндра 38, штоки которых через проушины соединены с дугообразной стрелой 33 и служат для подъема и опускания ее. Поворотная стойка 35 также проущиной соединена с концом вала 39, установленного в корпусе поворотной колонки 40, а на другой конец вала 39 насажена звездочка 41, которая охвачена втулочно-роликовой цепью, концами закрепленной к штокам двух гидроцилиндров, осуществляющих поворот вала 39 и тем самым и всего гидрокрана в ту или другую сторону от продольной оси машины (гидроцилиндры и цепь на чертеже условно не изображены). Для устойчивого положения укладчика во время подъема специального контейнера 32 с тротуарными плитами стрелой 33 гидрокрана по обеим сторонам к раме 1 закреплены управляемые с пульта управления выносные опоры, выполненные в виде гидроцилиндров 42, несущих на штоках опорные башмаки 43. На раме 1 смонтирован механизм перемещения плит в контейнере 32 в виде закрепленных на штоках гидроцилиндров 44 толкателей 45. В нижней части рамы 1 смонтированы: механизм вертикального перемещения плит на полозья 46, состояш.ий из шарнирно закрепленных при помощи оси 47 на раме 1 Г-образных приводных гидроцилиндром 48 49; механизм укладки плит на основании, состояпдий из щаркирно установленных гидроцилиндров 50, на щтоках которых закреплены толкатели 51 ползунов 52, перемещающихся по полозьям 46, щарнирно связанным с рамой 1 тягами 53; механизм перевода механизма укладки плит на основание в транспортное положение, состоящий из кронщтейнов 54,жестко связанных с рычагами 49 и откидных крючков 55, щарнирно закрепленных на полозьях 46. По обеим сторонам укладчика установлены механизмы поперечного перемещения плит по полозьям 46, каждый из которых выполнен в виде подпружиненного коромысла 56 со свободно сидящими на осях по его концам роликами 57. Каждое коромысло проущиной соединено со стойкой входящей в винтовую пару с гайкой, проущиной установленной на кронщтейне рамы 1. Упомянутые стойка, гайка с проущиной и кронщтейн на чертеже не показаны. Для предотвращения самопроизвольного опускания механизма укладки плит на основание из транспортного положения, а также устойчивого положения Г-образных рычагов 49 при передаче на них плит из контейнера 32 на раме 1 установлен.механизм замка Г-образных рычагов 49, который выполнен в виде ряда стоек 58, на свободных концах несущих ролики 59, контактирующие с Г-образными рычагами 49 как в .момент передачи на них плит из контейнера 32 при укладке плит, так и при транспортном положении механизма укладки плит на основание. Стойки 58 жестко связаны с валом 60, установленным на раме 1 и имеющим возможность совершать возвратно поворотное движение под действием приводного гидроцилиндра, связанного щтоком через рычаг с валом 60. Упомянутый гидроцилиндр и рычаг на чертеже не показаны. Вал 60 через рычажно-щарнирную систему 61 связан с валом 62 отсекателей 63, посредством которых осуществляется поворот вала 62 и тем самым подъем или опускание отсекателей 63. Необходимую энергию для гидрообъемных приводов укладчика вырабатывают гидронасос 64 с, дизельным двигателем 65, который связан с топливным баком 66. Управление укладчиком осуществляется с сидения 67 посредством рукояток 68, связанных с гидрораспределителями, а направление движения задается поворотом оси колес 4, кинематически связанной с рулем 69. Укладчик плит работает следующим образом. Специальные контейнеры 32 с уложенными в них плитами доставляются к месту укладки заранее и расставляются вдоль укладываемой полосы с заданным интервалом или непосредственно подвозятся к-работающему укладчику. Стрелой 33 гидрокрана контейнер с плитам устанавливают на фиксаторы на раме 1. Во время подъема конте;ь нера с плитами укладчик опирается ка опорные бащмаки 43, а после подъе.ма и установки контейнера 32 па фиксаторы на раме 1 опорные башмаки подымаются к верху. Затем гидроцилиндры 44 толкателями 45 перемещают плиты в контейнере 32 на свободные площадки Т-образных рычагов 49 и когда первый ряд плит окажется на площадках Г-образных рычагов 49, то дается команда на поворот вала 60. Поворачиваясь вал 60 отводит стойки 58 с роликами 59 вниз и одновременно через рычажно-щарнирную систему 61 поворачивается вал 62, благодаря чему отсекатели 63 .гюжятся }ia грани первого ряда плит ос1-авп1ихся в контейнере 32 и самопроизвольное падение плит н контейнера после ухода рычагов 49 исключается. Поворот вала 60 осуществляется приводным гидроцилиндром, шток которого щарнирно через рычаг связан с валом 60. Упомянутый гидроцилиндр и рычаг па чертеже не изображены. После того когда отсекатели 63 легли на грани оставщихся плит в контейнере 32 дается команда гидроцилипдру 48, который поворачивает вал 47, и Г-образные рычаги 49 уносят на себе плиты. Дойдя до горизонтального положения рычаги 49 ложат плиты на полозья 46 и гидроцилиндры 50 через ползуны 52 толкателями 51 перемещают плиты по полозьям 46 до упора с ранее уложенными плитами и после упора под действием усилия развиваемого гидроцилиндрами 50 мащина отталкивается от-плит, т. е. передвигается на шаг. Одновременно с движением укладчика на таг грани укладываемой полосы тротуара еще находящегося на полозьях 46 охватываются роликами 57, установленными па подпружиненных коромыслах 56 (фиг. 1 и 4) механизма поперечного перемещения плит. В начальный момент отвода толкателей 51 назад, т. е. в исходное положение, происходит незамедлительное поперечное перемещение плит по полозьям 46 подпружиненными коромыслами 56 роликами 57. При подаче команды на отвод толкателей 51 в исходное положение одновременно подается команда гидроцилиндру 48 на обратный поворот вала 47, т. е. на возврат Г-образных рычагов 49 к контейнеру 32 - за очередным рядом плит. За время отвода гидроцилиндрами 50 ползунов 52 с толкателями 51 в исходное положение на укладчике осуществляют следующие операции: возврат Г-образных рычагов 49 в исходное положение посредством гидроцилиндра 48 за очередным рядом плит; поворот вала 60 со стойками 58, т. е. поДпор Г-образных рычагов 49 роликами 59
7
и одновременный поворот через шарнирнорычажную систему 61 вала 62, т. е. подъем отсекателсй 63; передача очередного ряда плит из контейнера на площадки рычагов 49; обратный поворот вала 60 со стойками 58 и одновременный поворот вала 62, т. е. опускание отсекателей 63 на грани плит оставшиеся в контейнере 32; поворот вала 47. т. е. снова перенос плит на полозья 46 рычагами 49. При этом конец поворота вала 47 совпадает с окончанием отвода в исходное положение толкателей 51, т. е. с окончанием отхода толкателей 51 в исходное положение очередной ряд плит уложен рычагами 49 на полозья перед толкателями 51, которые опять получают команду на перемещение плит по полозьям 46 до упора с ранее уложенными плитами и после упора мащина снова передвигается на шаг.
Во время движения укладчика на щаг под действием гидроцилиндров 50 полозья 46, будучи шарнирно связанными тягами 53 с рамой 1, движутся вместе с укладчиком и с каждым шагом укладчика полозья 46 покидает очередной ряд плит, которые в конце перемещения укладчика на щаг вступают в контакт с прижимными роликами 15 механизма утапливания плит. В момент начала отхода в исходное положение толкателей 51 подпружиненные пружинами 17 коромысла 14 прижимными роликами 15 незамедлительно подталкивают плиты к основанию, а механизм поперечного перемещения плит по полозьям 46 в виде подпружиненных коромысел 56 с роликами 57 осуществляет ступенчатое поперечное сближение плит друг к другу.
Во время укладки плит укладчик опирается на укладываемую полосу через башмаки 2 роликами 3, которые воспринимают вибрацию работающего укладчика и вес его части. Это позволяет осуществить не только посадку плит в основание, но и получить одинаковый уровень смежных их краев. Для совместного движения укладчика и башмаков 2, последние соединены с осью 8 зацепами 20. Укладчик во время укладки плит опирается на башмаки 2 стойками 21, которые образуют винтовую пару с кронштейнами 22, каждый из которых жестко связан со спаренными рычагами 23. На верхнюю часть рычагов 23, а именно на их выступы 27 фигурным пазом опираются стойки 26; образую1дие замок, предохраняющий самопроизвольное опускание укладчика. Необходимый поворот рычагов 23 осуществляют параллельно установленные гидроцилиндры 24, щарнирно соединенные с кронштейнами 25 и спаренными рычагами 23.
После окончания укладки плит укладчик приводят в транспортное положение следующим образом.
Между плитами еще находящимися на полозьях 46 и толкателями 51 ложат удлинители и от их отталкиваются толкателями 51 до полного выхода полозьев из-под плит. Затем при нижнем положении Г-образных угловых рычагов откидные крючки 55 цепляются за кронштейны 54 и последующим поворотом вала 47 подымают полозья 46 и тем самым толкатели 51 с ползунами 52 и гидроцилиндрами 50 в транспортное положение. При этом поворотом вала 50 стойками 58 и роликами 50 Г-образные угловые рычаги 49 подпираются, чем исключается самопроизвольное опускание последних при транспортном положении укладчика. После чего путем поворота и фиксации проводят в транспортное положение механизмы поперечного перемещения плит с их коромыслами 56 и роликами 57. Далее посредством винторычажных механизмов 10 освобождают оси 9 механизмов принудительного утапливания плит и сняв зацепы 20 с башмаков 2, подымают, цепляя ось 9 за кронштейн 31. Затем посредством гидроцилиндров 24 несколько укладчик подымают до возможности отвода в сторону стоек 26, и дается команда на втягивание штоков гидроцилиндров 24, в результате которой укладчик опускается
на ведущие колеса 5 освобождая от нагрузки башмаки 2, которые поочередно подвешиваются на кронолтейны 30. После чего укладчик готов к самостоятельному транспортному движению. Такое выполнение укц ладчика позволяет, кроме того, повысить качество укладываемого покрытия.
Формула изобретения
отличающийся тем, что, с целью повышения надежности и степени механизации работы, он снабжен установленными на раме механизмами принудительного утапливания плит, выполненными в виде кронштейнов с шарнирно закрепленными по обеим их сторонам коромыслами, несущими на одном плече прижимные ролики, а другим - связанные посредством пружины с кронштейнами.
5 тем, что он снабжен предохранительным гидравлическим механизмом в виде параллельно установленных гидроцилиндров, щарнирно соединенных с ними кронштейнов и закрепленных на раме спаренных рычагов, ось которых установлена на торце рамы, причем каждый кронштейн снабжен шарнирной стойкой, имеющей на свободном конце фигурный паз.
Источники информации, принятые во внимание при экспертизе
S1- Авторское свидетельст-во СССР по
заявке № 2400545/29-33, кл. Е 01 С 19/52, 1976 (прототип). фиг. 2
фиг. 4
