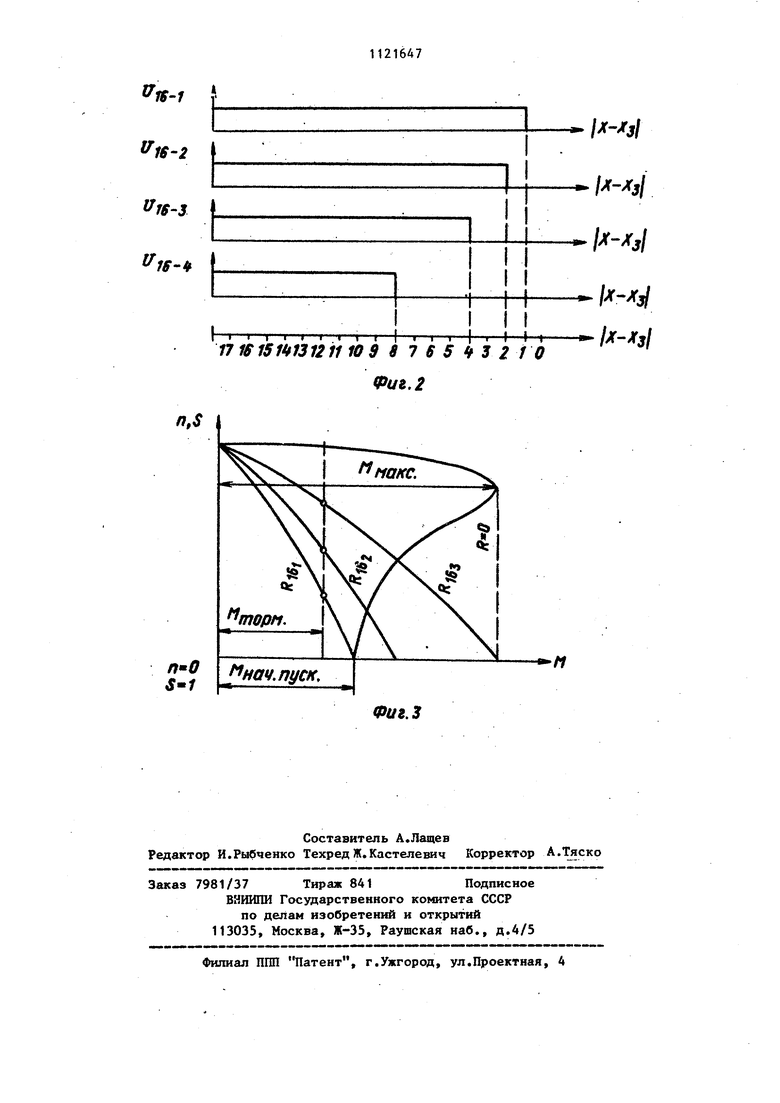
11 Изобретение относится к автоматике и вычислительной технике, а именно к цифровым системам автоматическо го регулирования, и может быть использовано дли отслеживания угловых и линейных перемещений в системах слежения с повышенными требованиями к точности отслеживания регулируемого параметра. Известна следящая система, содержащая электропривод регулируемого органа, кинематически связанный с преобразователем угла поворота вала код, выход которого соединен с первы входом элемента сравнения, второй вход котррого соединен с выходом задатчика 1 J. Известная следящая система сложна в настройке и имеет низкие быстродей ствие и точность.. Наиболее близкой по технической сущности к предлагаемой является сле дящая система, содержащая последовательно соединенные первые выходы пре образователя код-ширина импульса, блок реле, блок секционных сопротивлений и группу контактных колец фазного ротора двигателя, выход двигате ля через последовательно соединенные преобразователь угол-код, преобразователь код-код соединен с первыми разрядными входами первого сумматора вторые разрядные входы которого сое- |динены с входами цифрового задатчика. а вход переноса младшего разряда первого сумматора соединен с источни ком, напряжение которого соответствует сигналу 1, первый выход первого сумматора соединен с первыми входами первого элемента И и преобразователя код-ширина импульса непосредственно и через элемент НЕ с первым входом второго элемента И и вторым входом преобразователя кодширина импульса, второй выход соединен с вторыми входами первого и вто(рого элементов И, своими выходами соединенных с первым и вторым входами реверсивного пускателя, выход которого соединен с входом двигателя, а третьи входы преобразователя кодширина импульса соединен соответственно с разрядными выходами первого сумматора С2. Недостатком известной следящей системы является ее низкая точность. Цель изобретения - повьш1ение точности следящей системы. 7 Поставленная цель достигается тем, что следящая система содержит последовательно соединенные преобразователь код-ширина импульса, блок реле, блок секционных сопротивлений и группу контактных колец фазного ротора двигателя, выход двигателя через последовательно соединенные преобразователь угол-код, преобразователь код-код, первый сумматор, первый элемент И и реверсивньй пускатель соединен с входом двигателя, вторые входы первого сумматора соединены с выходами цифрового задатчика, второй выход преобразователя код-ширина импульса через второй элемент И соединен с вторым входом реверсивного пускателя и вторым входом первого элементу И непосредственно, первый вход первого элемента И соединен с первым входом преобразователя кодширина импульса и через элемент НЕ с вторым входом второго элемента И и вторым входом преобразователя кодширина импульса, третьи входы которого соединены соответственно с вторыми входами первого сумматора, дополнительно содержит последовательно соединенные блок элементов НЕ и второй сумматор, выходы которого соединены с четвертыми входами преобразователя код-ширина импульса, а входы блока элементов НЕ соединены с соответствующими третьими входами преобразователя код-ширина импульса. Преобразователь код-ширина импульса содержит первый блок элементов И и последовательно соединенные второй блок элементов И, первый элемент ИЛИ, второй элемент ИЛИ, третий элемент ИЛИ и четвертый элемент ИЛИ, вторые входы второго, третьего и четвертого элементов ИЛИ подсоединены соответственно к второму, третьему и четвертому выходам второго блока элементов И, третьи входы элементов ИЛИ соединены с соответствующими выходами первого блока элементов И, первые выходы преобразователя, код-ширина импульса соединены с соответствующими первыми выходами первого, второго и третьего элементов ИЛИ, второй выход - с выходом четвертого элемента ИЛИ, первый вход - с первыми входами первого блока элементов И, третьи входы - с вторыми входами первого блока элементов И, четвертый вход - с вторыми входами второго блока элементов И. На фиг. 1 представлена блок-схема следящей системыj на фиг.2 - циклограмма; на фиг.З - трафик зависимости (M) и (M). Устройство содержит двигатель 1, преобразователь 2 угол-код, преобразователь 3 код-код, первый сумматор А, цифровой задатчик 5, вход 6 первого сумматора, первый элемент 7 И второй злемент 8 И, выход 9 первого сумматора 4, элемент НЕ 10,реверсивный пускатель 11, преобразователь 12 код-ширина импульса, блок элементов НЕ 13, второй сумматор 14, блок 15 реле, блок 16 секционных сопротив 17, 17 .. лений с контактами 17;, , , 17;;, группа 18 контактных колец фазного ротора двигателя, входы 19 и 20 второго сумматора, блок 21 элементов И, второй блок 22 элементов И, элементы ИЛИ 23, входы 24-27 и выходы 28 преобразователя 12 код-ширина импульса. Собственно следящая система содержит последовательно соединенные первые выходы 28 преобразователя 12 код-ширина импульса, блок 15 реле, контактные группы 17 реле, блок 16 секционных сопротивлений и группу 18 контактных колец фазного ротора двигателя 1, причем выход двигателя через последовательно соединенные преобразователь 2 угол-код, преобразователь 3 код-код соединен с первыми разрядными входами первого сумматора 4, вторые разрядные входы которого соединены с выходами цифрового задатчика 5, а вход 6 переноса мпадшего разряда первого сумматора 4 соединен с источником, напряжение которого соответству ет сигналу 1, первый выход 9 первого сумматор 4 соединен с первым входом первого элемента И 7 и с первым входом 26 преобразователя 12 код-птрина импуль са непосредственно, а через элемент НЕ 10 - с первым входом второго элемента И 8 и с вторым входом 27 преобразователя 12 код-ширина импуль са, второй выход которого соединен. с вторь1ми входами первого- 7 и второг 8 элементов И, своими выходами соеди ненных с первым и вторым входами реверсивного пускателя 11, выход которого соединен с входом двигателя 1 а третьи входы 24 преобразователя 12 код-йирина импульса соединены соответственно с разрядными выходами 1 474 первого сумматора 4, а также с входами блока элементов НЕ 13, последовательно соединенных с вторым сумматором 14 по первым разрядным входам,, вторые разрядные входы 19 которого занулены, а вход 20 переноса младшего разряда соединен с источником, напряжение которого соответствует сигналу 1, разрядные выходы второго сумматора соединены с четвертыми входами 25 преобразователя 12 кодширина импульса. Преобразователь 12 код-ширина импульса содержит первый 21 и втоР° 2 блоки элементов И по п двухИ в кахдцом, где входовых элементов п - число разрядов выходного кода сумматоров 4 и 14, и последовательно соединенные п-й 23, (п-1)-й 23, (п-2)-й 23, ..., первый 23, элементы ИЛИ, вторые и третьи входы первого 23, второго 23, ..., (п-1)-го 23. элементов ИЛИ соединены соответственно с выходам первого 21 и второго 22 блоков элементов И, несущими те же номера разрядов кода, а п-й 23 двухвходовый-элемент ИЛИ соединен своими входами с оставшимися выходами первого 21 и второго 22 блоков элементов И, несущими п-е разряды кода, при этом первые выходы 28 преобразователя 12 код-ширина импульса соединены с соответствующими выходами второго 23, ..„, (k-l)-ro 23j, k-го 23 элементов ИЛИ, где kin (на чертеже ), первый вход 26 - с первыми входами первого блока 21 элементов И, второй вход 27 с первыми входами второго блока 22 элементов И, третьи входы 24 - с вторыми входами первого блока 21 элементов И, четвертые входы 25 - с вторыми входами второго блока 22 элементов И. Следящая Система работает следующим образом. Пусть в начальный момент времени рассогласование отсутствует, т.е. , - регулируемая величина л. - величина задания. В этом случает на первые и вторые разрядные входы первого сумматора 4, в качестве которого используется двоичный комбинационный сумматор, от преобразователя 3 код-код, обеспечивающего преобразование кода Грея, используемого во избежание грубых оши бок считывания, в двоичный код и от цифрового задатчика 5 поступают соот ветственно два равных двоичных числа; число в прямом коде, прёдставлягацее величину регулируемого.параметра, и то же число в обратном коде, представлякицее величину задания. Пусть, например, эти числа равны 170 или в двоичном виде lOtOIOIO. С учетом того, что на входе 6 переноса младшего разряда сумматора 4 всегда присутствует сигнал 1, этим суммаiTopoM вьшолняется следукяцая операция 10101010 01010101 1 1.ОППОПООО. Сигнал 1 образуется на первом выходе 9 переноса старшего разряда сумматора 4, а на всех его разрядных выходах сигналы равны нулю. Эти сигналы поступают на третьи вхог ды 24 преобразователя 12 код-ширина импульса и на входы блока 13 элементов НЕ. Поэтому на всех выходах этого блока, а следовательно, и на первых разряднь1х входах сумматора 14 присутствуют сигналы 1.Так как вторые входы 19 этого сумматора занулены, а на его вход 20 переноса младшего разряда постоянно подается сигнал 1, то в результате.выполняемой сумматором 14 операции сложе™ ния получается следующее число: 11111111 00000000 1.00000000 Сигнал 1 слева от точки образуется на неиспользуемом выходе перено са старшего разряда сумматора 14, а на всех его разрядных выходах образуются сигналы О, поступающие на чет рертые входы преобразователя код-пшрина импульса. Так как третьи 24 и четвертые 25 входы преобразователя 12 код-ширина импульса являются первыми входами соответственно первого 21 и второго 22 блоков элементов И, то на всех выходах этих блоков сигна лы также равны О. Следовательно, и на первых выходах 28 преобразователя 12 код-ширина импульса сигналы также равны нулю, так как эти выходы соответствуют выходам k-ro 23, (k1)-го 23з, второго 23 элементов ИЛИ, на входы которых поступают сигналы О с выходов первого 21 и второго 22 блоков элементов И. Со второго выхода преобразователя 12 код-ширина импульса, являющегося выходом первого элемента ИЛИ 23, также поступает сигнал О на вторые входы первого 7 и второго 8 элементов И. При этом все реле блока 15 обесточены, их контакты 17 разомкнуты, блок 16 секционных сопротивлений полностью подключен к группе контакTHbix колец 18 фазного ротора двигателя 1 с выходов первого 7 и второго 8 элементов И на входы реверсивного пускателя 11 подаются сигналы О, вследствие чего он оказывается разомкнутьм и питание на двигатель 1 не подается. Следящая система не производит никаких операций над регулируемым органом. Число k выходов элементов ИЛИ 23, представлякицих общее число выходов преобразователя 12 код-ширина импульса и используемых для преобразования величины рассогласования в набор широтно-импульсных сигналов, может быть меньшим или равным числу п разрядов сумматоров 4 и 14. При этом, если величина рассогласования превышает значение 2, то она отрабатывается двигателем 1 при максимальных его оборотах, так как в этом случае группа контак тных колец 18 оказывается короткоз1амкнутой.На чертеже для простоты приведен Jcлyчaй,когда .При (n-k) ввкодов элементов ИЛИ 23, несущих старшие разряды кода, не используются в качестве выходов преобразователя 12 код-ширина импульса. Пусть теперь в цифровом задатчике 5 число изменилось и стало равным, например, 165 или в двоичном виде 10100101. В обратном коде это число равно 01011010. При этом величина рассогласованияХд 170 - 165 . Суммчтор 4 осуществляет операцию сложения 10101010 01011010 1.00000101 Величина рассогласования в двоичном коде равна 101. На выходе первого и третьего весовых разрядов первого сумматора 4 образуются сигналы 1. Такой же сигнал присутствует и на его выходе 9 переноса старшего разряда. Этот сигнал соответствует единице, стоящей слева от точки. На тре тьих входах преобразователя 12 кодширина импульса присутствует сигнал 00000101, а на его четвертых входах сигнал с выходов второго сумматора 14, равный .11111010 | 00000000 -.11111011 и являющийся результатом инверсии выхода сумматора 4, производимой бло ком элементов 13 НЕ, и сложения это- го числа с 1 во втором сумматоре 14, Эти сигналы поступают на вторые вход соответственно первого 21 и второго 22 блоков элементов И, Сигнал 1 с выхода 9 переноса старшего разряда сумматора 4 поступает на первый вход преобразователя код-ширина импульса и соответственно на первые входы рервого блока 21 элементов И, На пер вые входы второго блока 22 элементов И в этот момент поступает сигнал О с второго входа преобразователя код-ширина импульса, соединенного че рез элемент НЕ 10 с выходом 9 сумматора 4, Таким образом, только на выходах элементов И 21 и 21 первого блока 21 элементов И присутствуют сигналы 1, которые пос упают на входы элементов ИЛИ 23 и 23, Но так как элементы ИЛИ 23 от п-го до первого соединены последовательно,то сигнал 1 присутствует на выходах элементов ШШ 23, 23, 23, соответ ствующих весовым разрядам кода 2, 2, 2°, Эти сигналы включают реле 15.J, и 15 блока 15 реле. Кроме того, сигнал 1 с выхода первого элемента ШШ 23 , несущего младший весовой разряд, поступает на вторые входы первого 7 и второго 8 элементов И, Н так как сигнал 1 с выхода 9 сумматора 4 поступает только ka первый вход первого элемента И 7, то лишь на его выходе присутствует сигнал 1, который с помощью реверсивного пускателя 11 включает двигатель 1 на отработку величины рассогласования в сторону уменьшения значения отслеживаемого параметра. Скорость, с которой двигатель 1 отрабатывает рассогласование, определяется.величиной сопротивлений блока 16 секционных сопротивлений, подключенного к группе контактных колец 18 фазного ротора двигателя 1. Величина сопротивлений, подключаемыхк группе контактных колец 18, дискретно изменяется от нуля до некоторой наибольшей величины, соответствующей последовательному включению сопротивлений всех секций. В рассматриваемом случае начальная скорость отработки рассогласования опре.деляется сопротивлением секции 16, так как контактные группы 17 и 17 реле 15 и 15- замкнуты. При достижении рассогласования, равного 3, размыкаются контакты 17- реле 15, управляемого выходом элемента ИЛИ 23j, несущего кодовую единицу с весом 2, Сопротивление в цепи фазного ротора двигателя 1 увеличивается, что приводит к ступенчатому снижению скорости двигателя. Еще раз скорость двигателя 1 снижается при достижении рассогласования, равного 1, так как при этом размыкаются контакты 17 .. реле 15 и подключается дополнительная секция 16 сопротивления в цепи фазного ротора двигателя 1. Как только рассогласование будет устранено, реле 15 обесточиваются, реверсивный пускатель 11 оказывается разомкнутым и двигатель 1 также обесточен. Это состояние достигается появлением сигнала О на выходах всех элементов ИЛИ 23. Сигналы, возникающие на разрядных выходах второго сумматора 14 в ходе устранения рассогласования положительного знака, не оказывают никакого влияния, так как при таком знаке рассогласования на выходе 9 переноса старшего разряда первого сумматора 4 постоянно присутствует сигнал 1, который через элемент НЕ 10 в виде сигнала О поступает по второму входу преобразователя 12 код-ширина импульса на первые входы второго блока 22 элементов И, в результате чего все элементы этого блока заперты. Итак, величина рассогласования, равная 5, отрабатывается путем трехступенчатого снижения скорости в пределах диапазонов рассогласований 5-3, 3-1, 1-0. Поэтому, если в преобразователе 12 код-ширина имульса используется k выходов з п возможных, то любое расогласование, большее, значения 2 , отрабатывается k ступенями скорости. В общем случае при , например яри , , и рассогласовании, превышающем 2, например 2 зсе контакты 17 реле 15 замкнуты и следящая система начинает о рабатывать рассогласование с максимальной скоростью двигателя 1 до до стижения рассогласования, равного 7 или в двоичном виде 0111. При этом контакты 17 и скорость ступенчато уменьшается, так как в цепь фазного ротора вводится секция 16. блока 16 секционных сопротивлеНИИ. Снижение скорости происходит также при достижении значений рассо ласования 0011, 0001, а остановка двигателя - в отсутствие рассогласо вания. Отсмзда видно, что ступени . изменения рассогласования отвечают выражению , где ,2,...,k, при этом каждая ступень отрабатывается своей скоростью, поэтому в общем случае время отработки каждой ступени можно представить выражениемt()Vp, , где Ve - скорость двигателя 1 (числ его оборотов V,Vj . ..V.;), за висящая от выбранных величин секций сопротивлений 16, включаеьа 1х в цепь фазного ротора двигателя 1. . Этим способом можно в огфеделенных пределах выбирать ступенчатую характеристику отработки рассогласования. Можно, например, потребовать, чтобы время отработки ступене рассогласования различными скоростями было одинаковым. Теперь рассмотрим третий случай, соответствующий отрицательному знаку рассогласования X - х 0. Пусть, например, х 175 или в двоичном виде 10101111. Это число в обратном коде равно 01010000. Первы сумматор 4 производит вычисления 10101010 01010000 O.lltllOII, Сигнал на выходе 9 сумматора 4 с ответствует цифре слева от точки, т.е. О. Так как этот сигнал посту 7 пает на первые входы первого блока 21 элементов И и на первый вход первого элемента И 7, то на выходах всех этих элементов И сигналы равны О. Кодовая комбинация на выходе блока 13 элементов НЕ и на первых входах второго сумматора 14 имеет вид 00000100, а на разрядных выходах второго сумматора 14 оооооТоо 00000000 ооооо оТ , Этот же сигнал присутствует и на выходах второго блока 22 элементов И, так как он поступает на вторые входы этого блока элементов И с разрядных выходов второго сумматора 14, а на первые его входы подается сигнал 1 с ялхода элемента НЕ 10. Входы элементов ШШ 23 преобразователя 12 кодширина импульса подключены симметрично к выходам первого 21 и второго 22 блоков элементов И, поэтому полученное двоичное число 00000101-подавае элементов ИЛИ 23 описанным вьше способом, образует на выходах элементов ШШ 23 , 23 , 23 сигнал 1 и производит все действия, описанные для второго случая. Однако так как теперь сигнал 1 с выхода элемента НЕ 10 поступает на первый вход второго элемента И 8, а на его второй вход сигнал 1 поступает с выхода элемента ШШ 23, то сигнал 1, образующийся на выходе второго элемента ИВ, включает реверсивный пускатель 11 на отработку рассогласования в направлении увеличения значения отслеживаемого параметра. После устранения рассогласования все реле блока 15 обесточиваются, реверсивнь пускатель 11 размыкается, и двигатель 1 также обесточивается. Таким образом, скорость отработки двигателем 1 возникшего рассогласования ступенчато снижается с уменьшением величины ргюсогласования, достигая наименьшего значения при рассогласовании, равном 1. Скорость отработки этого минимального рассогласования остается одной и той же, независимо от того, какой . скоростью отрабатывается начальная величина рассогласования. Этим обеспечивается достижение следящей системой одного и того же ее положения при выключении двигателя после устранения рассогласования, а значит и повышение точности следящей системы. Точность следящей системы зависит от величины шага квантования, определяемой числом разрядов кода преобразователя угол-код и соответствую1цими числами разрядов сумматоров и цифрового задатчика. Для повышения точности эти параметры увеличивают. Однако при малом шаге квантования в следящих системах, где не учитываются зависимость величины рассогласования от скорости, может иметь место проскакивание нуля, ведущее к возникновению дерганья регулируемого органа. Предлагаемая система свободна от этого недостатка.
Фи.1
л/и
Фиг. 2


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Следящая система | 1979 |
|
SU930234A1 |
| Способ определения расхода воды в открытых каналах и устройство для его осуществления | 1989 |
|
SU1691686A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365057C1 |
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
| Цифровой следящий привод | 1980 |
|
SU941926A1 |
| Устройство для управления шаговым приводом | 1985 |
|
SU1315941A1 |
| Следящая система | 1985 |
|
SU1290251A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
1. СЛЕДЯЩАЯ СИСТЕМА, содержашая последовательно соединенные преобразователь код-ширина импульса, блок реле, блок секционных сопротивлений и группу контактных колец фазного ротора двигдтеля, выход двигателя через последовательно соединенные преобразователь угол-код, преобразователь код-код, первый сумматор, первый элемент И и реверсивный пускатель соединен с входом двигателя, вторые входы перворо сумматора сое динены с выходами цифрового задатчика, второй выход преобразователя код-ширина импульса через второй элемент И соединен с вторым входом реверсивного пускателя и вторым входом первого элемента И непосредственно, первый вход первого элемента И соединен с первым входом преобразователя код-ширина импульса и через элемент НЕ - с вторым входом- второго элемента И и вторым входом преобразователя код-ширина импульса, третьи входы которого соединены соответственно с вторыми входами первого сумматора, отличающаяся тем, что, с целью повьш1ения точности системы, она содержит последовательно соединенные блок элементов НЕ и второй сумматор, выходы которого соединены с четвертыми входами преобразователя код-ширина импульса, а входы блока элементов НЕ соединены с соответствующими третьими входами преобразователя код-ширина импульса. 2. Система поп.1, отличающаяся тем, что, с целью упрощения системы, преобразователь код-ширина импульса содержит первый блок элементов И и последовательно соеди9 ненные второй блок элементов И, перг вый элемент ИЛИ, второй элемент ИЛИ, третий элемент ИЛИ и четвертый элемент ИЛИ, вторые входы второго, третьего и четвертого элементов ИЛИ подсоединены соответственно к второму третьему и четвертому выходам второго -блока элементов И, третьи Ю входы элементов ИЛИ соединены с соотО ветствующими выходами первого блока элементов И, первые выходы преобра4ib зователя код-ширина импульса соединены с соответствующими первыми выходами первого, второго и третьего элементов ШШ, второй выход - с выходом четвертого элемента ИЛИ, первый вход - с первыми входами первого блока элементов И, третьи входы- с вторыми входами первого блока элементов И, четвертый вход - с вторыми входами второго блока элементов И.
. пуск. J-/
и
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система | 1975 |
|
SU533908A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящая система | 1979 |
|
SU930234A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
