(5«) СЛЕДЯЩАЯ СИСТЕИА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1121647A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПОЛИВА | 1992 |
|
RU2044470C1 |
| Способ определения расхода воды в открытых каналах и устройство для его осуществления | 1989 |
|
SU1691686A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Система измерения и регулирования толщины листового материала | 1985 |
|
SU1354165A1 |
| Устройство для определения направления и угла поворота вращающегося объекта | 1991 |
|
SU1786441A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Автоматизированная система полива | 1984 |
|
SU1250217A1 |
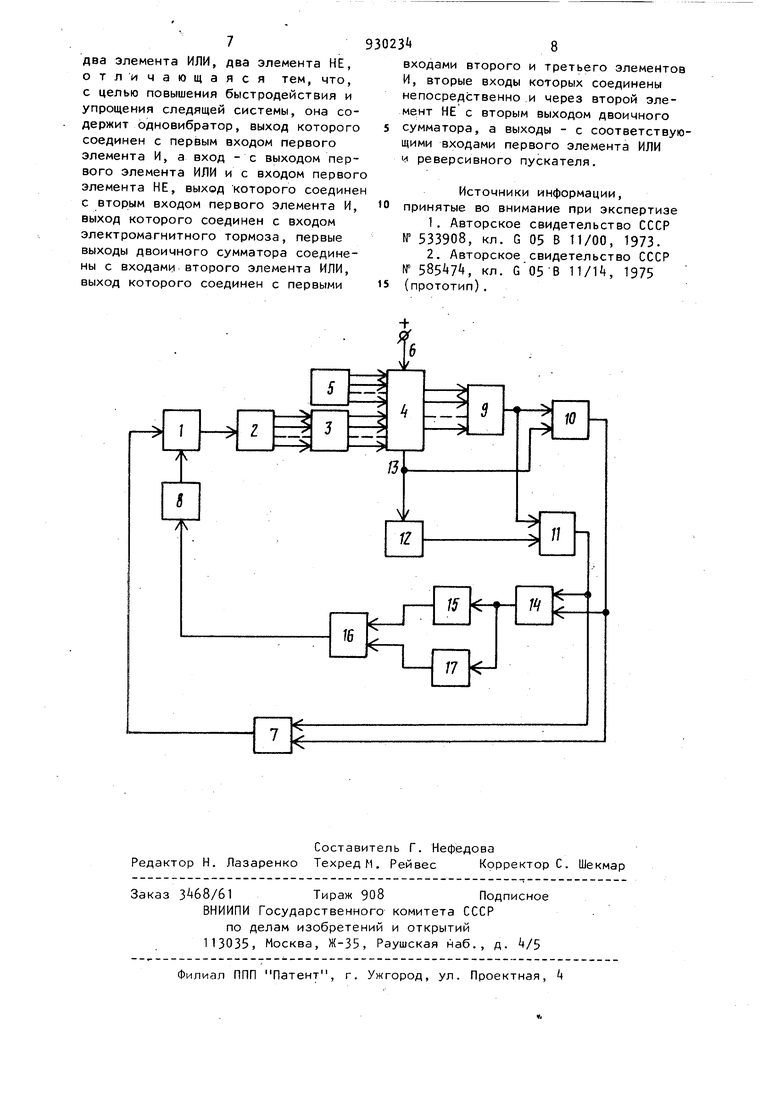
Изобретение относится к автоматике и вычислительной технике, а более конкретно к техническим средствам автоматического регулирования, и может быть использовано для отслеживания угловых и линейных перемещений осуществляемых ведущим приводом, а также для синхронизации затворов мно гопролетных гидротехнических сооруже ний. Известны следящие системы, содерж щие электропривод регулируемого ор- гана, кине матически связанный с преобразователем угол - код, выход кото рого соединен с первым входом элемен та сравнения, второй вход которого соединен с выходом задатчика 1. Недостатками известных следящих систем являются их сложность в настройке 1 низкое быстродействие и точность. Наиболее близкой по технической сущности к предлагаемой является сле дяш,ая система, содержащая электропривод регулируемого органа, кинематически свя занный с оцифрованным в коде Грея преобразователем угол- код, соединенным разрядными выходами с входами преобразователя кода Грея в двоичный код, разрядные выходы которого соединены с первыми входами двоичного сумматора, вторые входы которого соединены с разрядными выходами цифрового задатчика, а вход Перенос младшего разряда двоичного сумматора соединен с потенциалом символа Единица, реверсивный пускатель и электромагнитный тормоз, соединенные соответственно с первым и вторым входами электропривода регулируемого органа и три элемейта И, два элемента ИЛИ, два элемента НЕ 2. Недостатками известной следящей системы являются низкое быстродействие и ее сложность. Цель изобретения - повышение быстродействия и упрощение следящей системы. Поставленная цель достигается те что система дополнительно содержит одновибратор, выход которого соединен с первым входом первого элемента И, а вход - с выходом первого элемента ИЛИ и с входом первого элемента НЕ, выход которого соедине с вторым входом первого элемента И, выход которого соединен с входом электромагнитного тормоза, разрядные выходы двоичного сумматора соединены с входами второго элемента ЛЩ, выход которого соединен с первыми входами второго и третьего эле ментов И, вторые входы которых соот ветственно соединены непосредственно и через второй элемент НЕ с выходом Перенос старшего разряда ,двоичного сумматора, а выходы - с соответствующими входами первого элемента ИЛИ и реверсивного пускате ля. На чертеже приведена блок-схема следящей системы. I Следящая система включает электр привод регулируемого органа 1, оциф рованный в коде Грея преобра вателем угол - код 2, преобразователь 3 .кода Грея в двоичный код, двоичный сумматор k, цифровой задатчик 5, вход 6 Перенос младшего разряда двоичного сумматора, реверсивный пускатель 7, электромагнитный тормо 8, элемент ИЛИ 9, элементы И 10 и 1 элемент НЕ 12, : выход 13 Перенос старшего разряда двqичь oгo сумматора, элемент ИЛИ U, элемент НЕ 15, элемент И 16, одновибратор 17. Система работает следующим образом. Пусть в начальный момент временит рассогласование отсутствует, т.е. X - х О, где X - регулируемая величина; х - величина задания. В этом случае на разрядные входы двоичного сумматора 4 от преобразователя 3 кода Грея в двоичный и от цифрового задатчика 5 поступают два равных двоичных числа: на первые входы - число, записанное в прямом коде, а на вторые входы - то же число в обратном коде. Пусть, наприме эти числа равны 170, или в двоичном виде 10101010. В двоичном сумматоре 4 выполняется операция 10101010 01010101 1.00000000 На всех разрядных выходах сумматора 4 имеются нули, поэтому на выходе элемента ИЛИ 9 также получается нуль, который одновременно поступает на первые входы элементов И 10 и 11, в результате чего сигнал на их выходы также равен нулю. Следящая система не производит никаких операций над регулируемым органом. Пусть теперь в цифровом задатчике 5 число изменилось на одну единицу и уменьшилось до 169, или в двоичном виде 10101001. Тогда в обратном коде это число равно 01010110. Величина рассогласования x-x/i 0. Двоичный сумматор осуществляет операцию10101010 01010110 1.00000001 На выходе младшего разряда двоичного сумматора 4 и на его выходе 13 Перенос старшего разряда присутствуют сигналы Единица. С выхода сумматора k через элемент ИЛИ 9 сигнал Единица поступает одновременно на первые входы элементов И 10 и 11. Одновременно с выхода 13 Перекос сумматора k старшего разряда сигнал Единица поступает на второй вход элемента И 10, на выходе которого также образуется сигнал Единица. На выходе элемента-И 11 сигнал равен нулю, так как на его второй вход поступает сигнал Нуль с элемента НЕ 12. С выхода элемента И 10 сигнал поступает одновременно на один из входов элемента ИЛИ 14 и на один из входов реверсивного пускателя 7, который включает электропривод 1 на опускание регулируемого органа. После его опускания на один шаг квантования преобразователя угол - код 2, оцифрованного в коде Грея., исключающем грубые ошибки считывания, на выходе преобразователя 3/ кода Грея в двоичный код возникает то же число, что и на выходе задатчика, т.е. число 1б9, рассогласование исчезнет. На всех разрядных выходах двоичного сумматора образуются нули, и реверсивный пускатель 7 отключает электропривод 1. Сигнал, ранее поступивший на один из входов элемента ИЛИ И, после отрабо ки рассогласования прекращается, в результате чего на выходе элемента НЕ 15 образуется сигнал, равный единице. Сигнал с выхода элемента ИЛИ 14 задним фронтом в момент устранения рассогласования запускает одновибратор 17f положительный импульс которого поступает на второй вход элемента И 16, на первый вход которо го после отработки рассогласования поступает сигнал Единица с выхода элемента НЕ 15. С выхода элемента И 16 сигнал поступает на вход электромагнитного тормоза 8, обеспечивающего торможение электропривода 1 после отработки рассогласования. Длительность импульса одновибратора превышает длительность процесса торможения, а тормозной момент выбирается из условия остановки электро-. привода посередине шага квантования. Если рассогласование возникает в момент торможения, то на выходе.вторбго элемента НЕ 15 исчезнет сигнал Единица, что приводит к отключению электромагнитного тормоза 8, и величина рассогласования отрабатывается обычным образом. Рассмотрим третий случай, когда величина рассогласования х - . Пусть например, ху 171-или в двоичном виде 1010101f. Двоичный сумматор производит вычисления 10101010 01010100 ;;;i 0.11111111 На всех разрядных выходах двоичного сумматора i образуются сигналы Единица, которые поступают на входы элемента ИЛИ 9, в результате чего с выхода этого элемента сигнал Единица поступает на первые входы элементов И 10 и 11. Но, так как на выходе 13 Перенос старшего разряда сумматора сигнал равен нулю, только на втором входе элемента И 11 присут ствует сигнал Единица, поступающий с элемента НЕ 12; что приводит к об разованию сигнала Единица на выход элемента И 11. Этот сигнал одновременно поступает на вход схемы ИЛИ 1 и на вход реверсивного пускателя 7, который включает электропривод 1 на подъем регулируемого органа. После подъема регулируемого органа на один шаг квантования преобразователя угол - код 2 рассогласование устраняется и осуществляется торможение электропривода аналогично описанному. Таким образом, при возникновении любой величины рассогласования, отработка ее электроприводом осуществляется с максимальной скоростью, а после устранения рассогласования электропривод тормозится, что и повышает быстродействие предложенной следящей системы. Упрощение следящей системы достигается за счет использования цифровых устройств измерения и преобразования информации путем исключения устройств обратного преобразования код - аналог, используемых в известных аналогах предложенной следящей системы. В данной следящей системе можно использовать (и используется асинхронный электропривод, являющийся наиболее простым и надежным. Точность системы зависит от величины шага квантования преобразователя угол - код. Для ее повышения, как обычно, увеличивают число разрядов преобразователя угол - код, цифрового задатчика, двоичного сумматора, а также тормозной момент электропривода. Как показывает расчет, за счет упро1цения следящей системы стоимость ее снижается на 23%, по сравнению с известным. Формула изобретения Следящая система, содержащая электропривод, кинематически связанный с преобразователем угол - код, соединенным разрядными выходами с входами преобразователя кода, разряд ные выходы которого соединены с первыми входами двоичного сумматору, вторые выходы которого соединены с разрядными выходами цифрового задатчика, реверсивный пускатель и электромагнитный тормоз, соединенные соответственно с первым и вторым входами электропривода, три элемента И,
два элемента ИЛИ, два элемента НЕ, отличающаяся тем, что, с целью повышения быстродействия и упрощения следящей системы, она содержит одновибратор , выход которого соединен с первым входом первого элемента И, а вход - с выходом первого элемента ИЛИ и с входом первог элемента НЕ, выход которого соедине с вторым входом первого элемента И, выход которого соединен с входом электромагнитного тормоза, первые выходы двоичного сумматора соединены с входами второго элемента ИЛИ, выход которого соединен с первыми
входами второго и третьего элементов И, вторые входы которых соединены непосредственно и через второй элемент НЕ с вторым выходом двоичного сумматора, а выходы - с соответствующими входами первого элемента ИЛИ и реверсивного пускателя.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 533908, кл. G 05 В 11/00, 1973.
