лонного сигнала, второй сумматор и корректирующий привод, причем входы делительного устройства связаны с выходом второго и вторым выходом первого датчиков угла, выход делительного устройства подключен к второму входу второго сумматора, первый вход которого подсоединен к источнику эталонного сигнала, а выход через корректирующий привод- к второму входу второго редуктора.
Это позволяет повысить точность следящей системы.
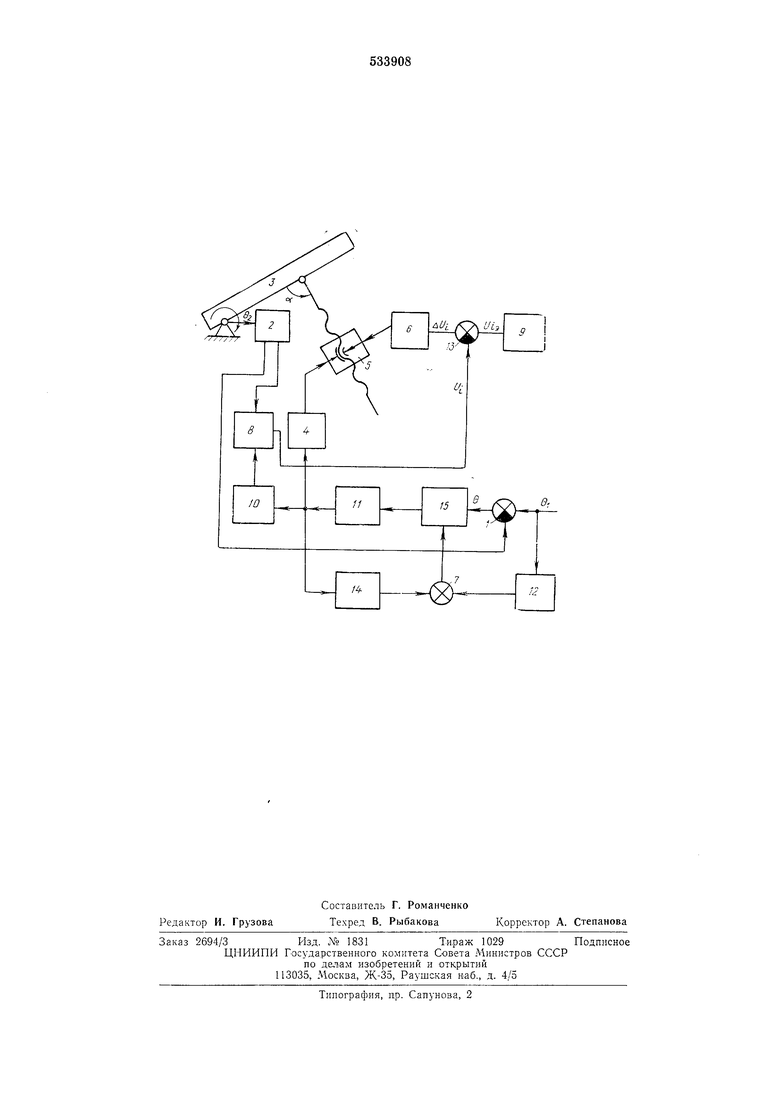
Блок-схема следящей системы представлена на чертеже.
Следящая система содержит чувствптельпый элемент 1, первый датчик 2 угла, объект 3, первый редуктор 4, второй редуктор 5, корректирующий привод 6, первый сумматор 7, делительное устройство 8, источник 9 эталонного сигнала, второй датчик 10 угла, исполнительный двигатель И, первый тахогенератор 12, второй сумматор 13, второй тахогенератор 14, усилитель 15 мощности.
На чертеже приняты обозначения: ©ь 02, 6 - соответственно входная величина, выходная величина и ошибка следящего привода; U - угол приложения усилия к нагрузке от винта выходного редуктора следящего привода; Ujg, Ьь AUi - сигналы, пропорциональные соответственно эталонному (желаемому), текущему значению передаточного числа i передачи от двигателя до оси вращения и их разности.
о - «а
buj
dt
dt
соответственно задаваемая скорость и скорость нагрузки.
Предлагаемый привод работает следующим образом.
Редуктор 5 является резьбо-колебательной передачей. Движение винту, т. е. выходное движение редуктора, придается вращением гайки, с которой связан выход редуктора 4. Передаточное число редуктора 5 можно изменять Б определенных пределах за счет изменения эксцентриситета оси гайки относительно оси вннта, смещения оси гайки, т. е за счет движения, передаваемого от корректирующего привода 6.
Движение редуктору 4 передается от двигателя 11, управляемого сигналом рассогласования в, выявленным чувствительным элементом 1 сравнением входной величины ©i и выходной величины, измеренной датчиком 2 угла, предварительно усиленным усилителем 15 мощности. Для повыщения качества переходного процесса привода в схеме предусмотрен тахогенератор 14, а для компенсации составляющей ошибки, пропорциональной скорости входной велнчины вь-тахогенератор 12, сигналы с которых после сравнения в сумматоре 13 поступают на второй вход усилителя 15.
С помощью датчиков 2 и 10 угла н делительного устройства 8 определяется как в статических, так и в динамических режимах текущее значение передаточного числа передачи от двигателя 11 до оси вращения объекта 3, которое в сумматоре 13 сравнивается с эталонным (желаемым) значением передаточного
числа, задаваемым источником 9 эталонного сигнала. Выявленная в сумматоре 13 разность Ai/i Uia-и таким образом воздействует на корректирующий привод 6, чтобы он изменял эксцентриситет между гайкой и винтом резьбо-колебательной передачи редуктора 5 до тех нор, пока передаточное число передачи от двигателя 11 до оси вращения объекта не станет равным желаемому значению. Таким образом, исключается переменность
скорости вращения тахогенератора 14 при постоянной скорости QI, т. е. обеспечивается постоянное выполнение условия компенсации составляющей ощибки пропорциональной скорости и сигналом с тахогенератора 12.
К.ак правило, изменение передаточного числа за счет изменения а сравнительно медленное. Быстродействне привода 6 должно быть в 5-10 раз выше быстродействия основного привода.
Применение предлагаемого устройства позволяет повысить точность привода, в котором и.меет место неременное передаточное число механической передачи, без необходимости разработки и установки на оси вращения нагрузки низкооборотного датчика скорости за счет ввода достаточно простых элементов.
Возможность реализации предлагаемого привода проверепа на АВМ.
35
Формула изобретения
Следящая система, содержащая чувствительный элемент, вход которого связан с выходом задатчика, а выход через последовательно соединенные усилитель мощности, исполнительный двигатель, первый и второй редукторы- с объектом, связанным с первым датчиком угла, выход которого подключен к
второму входу чувствительного элемента, тахогенераторы, один из которых установлен на валу задатчика, второй - на валу исполнительного двигателя, причем выходы тахогенераторов подсоединены к входам первого сумматора, выход которого связан с входом усилителя мощности, отличающаяся тем, что, с целью повыщения точности работы следящей системы, она содержит второй датчик угла, установленный на валу исполнительного
двигателя, делительное устройство, источник эталонного сигнала, второй сумматор и корректирующий привод, причем входы делительного устройства связаны с выходом второго и вторым выходом первого датчиков угла,
выход делительного устройства подключен к второму входу второго сумматора, первый вход которого подсоединен к источнику эталш-шого сигнала, а выход через корректирующий привод связан с вторым входом второго
редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU857924A1 |
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Следящая система | 1975 |
|
SU718832A1 |
| Силовой электрогидравлический следящий привод | 1975 |
|
SU589590A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| СЛЕДЯЩИЙ ПРИВОД | 1972 |
|
SU343251A1 |
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU405105A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |