Ияобретение относится к автоматическому управлению и контролю, приборостроению и может быть использовано в различных устройствах автоматики и измерительной техники при контроле, измерении и регулировании различных параметров.
Цель изобретения - повышение точности обработки задающего сигнала и расширение области применения системы.
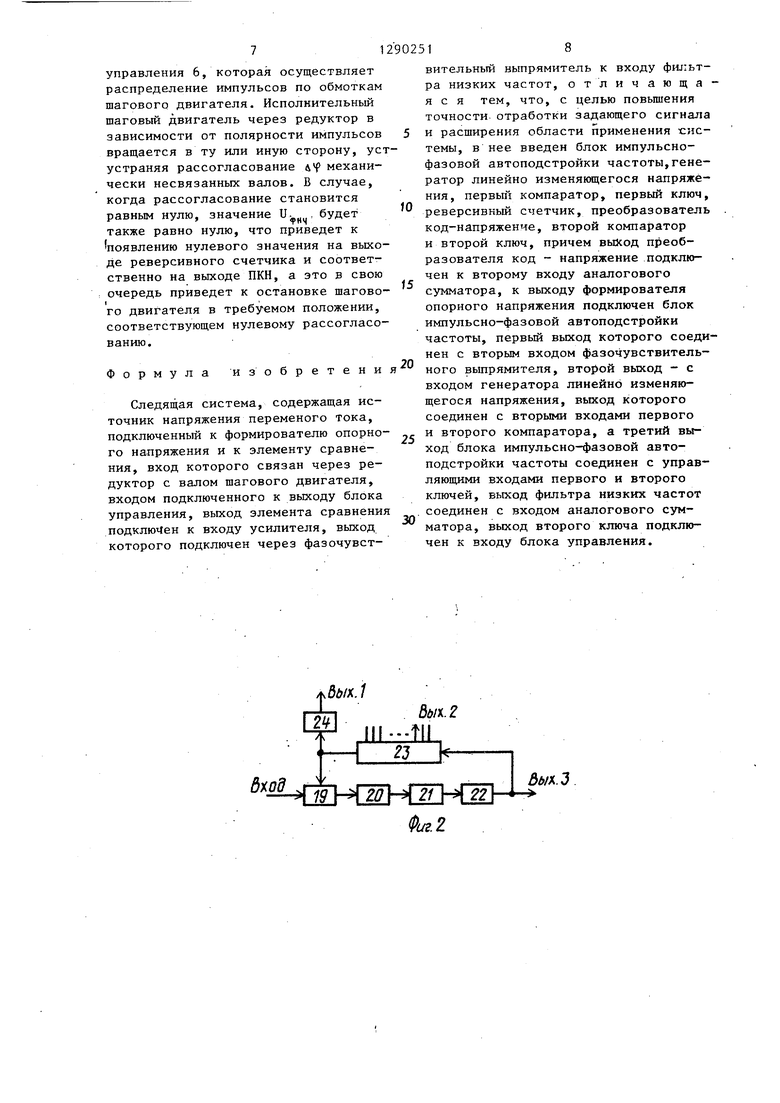
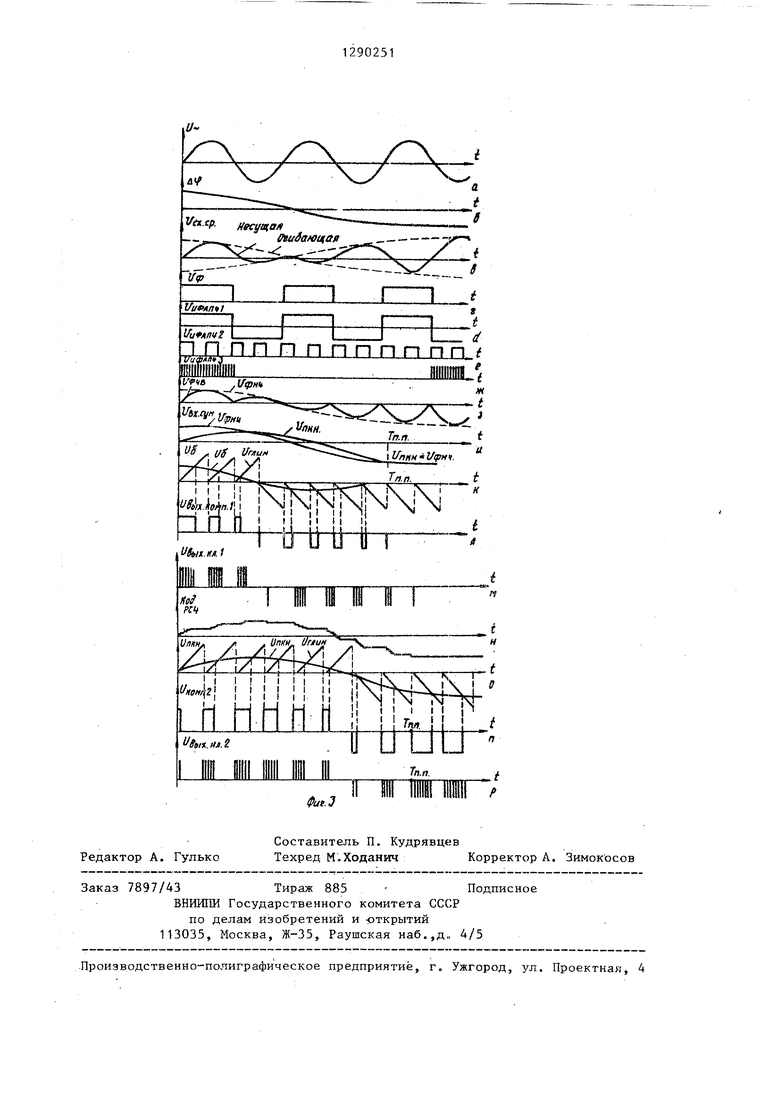
На фиг. 1 приведена функциональна схема следящей системы; на фчг. 2 - схема импульсной фазовой автоподстройки частоты (ИФАПЧ); на фиг. 3 - временные диаграммы сигналов в характерных точках схемы следящей системы
Следящая система содержит источник Т напряжения переменного тока, формирователь 2 опорного напряжения элемент 3 сравнения, редуктор 4, шагвый двигатель 5, блок 6 управления усилитель 7, фазочувствительный выпрямитель 8, фильтр 9 низких частот, блок 10 импульсно-фазовой автоподстройки частоты, генератор 11 линейно изменяющегося напряжения,.аналоговый сумматор 12, первый компаратор 13, первый ключ 14, реверсивный счетчик 15, преобразователь 16 код- напряжения, второй компаратор 17 и второй ключ 18.
Блок 10 импульсно-фазовой авто,- подстройки частоты содержит фазовый детектор 19, первый вход которого соединен с выходом формирователя опорного напряжения 2, а выход - с последовательно соединенными фильтром низких частот 20, интегратором 21, генератором 22 управляемым напряжением, п-разрядным двоичным. счетчиком импульсов 23, последний п-й выход которого связан одновременно с вторым входом фазового детек тора 19 и входом формирователя биполярных прямоугольных импульсов 24. Первый выход блока 10 совпадает по частоте и фазе с выходным сигналом
35
40
-45
При наличии углового рассогласования между двумя механически не связанными валами элемент сравнения 3, реализованный, например, на вращающихся трансформаторах или сельсинах в трансформаторном режиме и питаемый от источника напряжения переменного тока 1 (фиг.За), вьщает сигнал напряжения (фиг. 36), огибающая которого по амплитуде пропорциональна величине, а фаза несущей соответствует знаку углового рассогласования .(фиг. 3(5). После усиления усилителем 7 этот сигнал поступает на первый вход выпрямит еля 8, выполняющего функции активного умножителя,на второй вход которого поступают биполярные прямоугольные импульсы U (фиг. 33), сформированные на первом выходе блока 10 при помощи блока 24 (фиг. 2). Биполярные импульсы строго синхронизированы по частоте и фаз с прямоугольными однополярными им- пуЛьсами (фиг. Зг), получаемыми на выходе формирователя опорного напряжения 2 путем преобразования входного и гармонического сигнала, поступающего на формирователь от источника напряжения переменного тока 1. Следовательно, биполярные прямоугольные импульсы будут также синхронны по частоте и фазе с напряжением источника переменного тока и напряжением несущей. Строгая синхронизация сигналов обеспечивается блоком 10 благодаря наличию в его структуре интегратора 21 (фиг.2), создающего астатизм в блоке 10 и устраняющего возможность появления
Фазочувствительный выпрямитель 8 осуществляет перемножение сигналов, подаваемых на его входы - выходного сигнала (несущей) схемы
формирователя напряжения, второй вы- 50 ошибки в фазе, ход блока 10, снимаемый с i-ro выхода счетчика 23, как и третий выход, синхронен по фазе с сигналом первого выхода блока 10, однако частоты сигналов всех выходов ИФАПЧ различны 55 сравнения исход(фиг. Зв) и вьгходного и подчиняются соотношениюсигнала первого выхода блока 10
(фиг.ЗЭ), в результате чего на
f j. -. ,выходе выпрямителя появляется пуль сирующее напряжение U, (фиг. 3 з),
О
15
0
25
30
35
40
45
где f| - частота сигтип.гга nepisoro выхода блока 10;
f- - частота сигнала второго выхода блока 10;
f - частота сих нала третьего выхода блока 10;
п - максимальная разрядность
двоичного счетчика 23. Следящая сиетег а (фиг. 1) работает следующим образом.
При наличии углового рассогласования между двумя механически не связанными валами элемент сравнения 3, реализованный, например, на вращающихся трансформаторах или сельсинах в трансформаторном режиме и питаемый от источника напряжения переменного тока 1 (фиг.За), вьщает сигнал напряжения (фиг. 36), огибающая которого по амплитуде пропорциональна величине, а фаза несущей соответствует знаку углового рассогласования - .(фиг. 3(5). После усиления усилителем 7 этот сигнал поступает на первый вход выпрямит еля 8, выполняющего функции активного умножителя,на второй вход которого поступают биполярные прямоугольные импульсы U, (фиг. 33), сформированные на первом выходе блока 10 при помощи блока 24 (фиг. 2). Биполярные импульсы строго синхронизированы по частоте и фаз с прямоугольными однополярными им- пуЛьсами (фиг. Зг), получаемыми на выходе формирователя опорного напряжения 2 путем преобразования входного и гармонического сигнала, поступающего на формирователь от источника напряжения переменного тока 1. Следовательно, биполярные прямоугольные импульсы будут также синхронны по частоте и фазе с напряжением источника переменного тока и напряжением несущей. Строгая синхронизация сигналов обеспечивается блоком 10 благодаря наличию в его структуре интегратора 21 (фиг.2), создающего астатизм в блоке 10 и устраняющего возможность появления
Фазочувствительный выпрямитель 8 осуществляет перемножение сигналов, подаваемых на его входы - выходного сигнала (несущей) схемы
ошибки в фазе, сравнения исход(фиг. Зв) и вьгходного сигнала первого выхода блока 10
сг лаживаемое при помощи фильтра 9 к виду напряжения U (фиг, 3ч}, пропорциональному сигналу рассогласования лЧ Сфиг. 3S) , которое подается на первый вход аналогового сумматора 12. При отсутствии сигнала обратной связи на втором входе аналогового сумматора, что имеет место только в первый момент времени, на
пряжение , передается на выход сумматора в неизменном виде и, следовательно, поступает на первый вход первого компаратора 13. Однако уже по истечении длительности, равной одному такту формирования пилообразного напряжения на выходе генератора 11, подаваемому на второй вход первого компаратора, изменится состояние выхода реверсивного счетчика 15 (фиг. Зо), а значит возникает сигнал обратной связи и(фиг. Зи), что приведет к образованию на выходе аналогового сумматора 12 сигнала ошибки преобразования U - U,, ((Jftir. 3 к) . Так как контур аналого- цифрового преобразования содержит в структуре интегрирующее звено (реверсивный счетчик 15), которое вносит астатизм в динамическую подсистему преобразования, то с течением времени сигнал обратной связи станет равным входному воздействию , подсистемы преобразования (фиг.Зи) и, следовательно, ошибка преобразования Ug станет равной нулю. Значит, начиная с этого момента времени, выходной сигнал реверсивного счетчика будет в цифровой форме соответствовать значению иф„ц |или сигналу рассогласования лц механически не связанных валов. Итак, процесс преобразования сигнала 11,4 в контуре преобразования аналог - ко можно продемонстрировать в динамике на эпюрах сигналов, изображен- йых на фиг. 3„-о. Если на первый вход аналогового сумматора в начальный момент времени поступает сигнал UipHM пропорциональный лЧ , то на втором его входе будет формировать- ся, потактово сглаживаясь на выходе преобразователя 16, сигнал U (фиг. Зо). Тогда на выходе аналогового сумматора 12 образуется сигнал US (фиг. Зк) поступающий на первый вход первого компаратора 13. Одновременно на второй вход этого компаратора подается периодически повторя
O
0
5 -
0
5
ющееся пилообразное напряжение , генератора линейно изменяющегося напряжения 11. Длительность такта, а значит и частота пилообразного на- пряжения 11„„ц определяется частотой следования импульсов с второго выхода блока 10 (например, импульсная последовательность , (фиг.Зи) для случая i(n-2),T.e. сигнал второго выхода блока 10 снимается с (п-2), выхода двоичного счетчика импульсов 23 (фиг. 2). Отсюда видно, что в предлагаемой следящей системе легко изменить в нужном направлении период преобразования непрерывного сигнала рассогласования й.ч в дискретный код путем простого изменения номера i-ro разряда двоичного счетчика импульсов 23 (фиг. 2), т.е. перекоммутации требуемого промежуточного выхода счетчика 23 на второй выход блока 10. Это позволяет гибко повышать точность преобразования сигнала рассогласования дЧ при увеличении скорости вращения механически несвязанных валов в большом диапазоне изменения скоростей. Импульсы передним фронтом запускают генератор 11, а выходное напряжение U,,, ис- пользуется первым компаратором 13 для преобразования непрерывного сигнала Ug в ишротно-модулированную импульсную последовательность (фиг.3л ) , формируемую на выходе первого компаратора 13, которая поступает на первый вход первого ключа 14. Одновременно на второй вход этого ключа подается импульсная последовательность и„,,(фиг. Зж) с третьего выхода блока 10. Импульсные последовательности и,, и„, и„, и„,,, коищ (фиг. 3г.-ж, л) имеют строгую синхронизацию по передним фронтам за счет астатизма блока 10 (фиг.2), вводимого интегратором 21 и позволяющего исключить появление фазового рассогласования. Это способствует повышению точности преобразования непрерывного сигнала рассогласования дЧ, так как устраняет пропадание ;четных иг пульсов ид|(фиг. 3 н) за счет несовпадения передних фронтов импульснод последовательности U и ииф(хяч1фиг. Зл,|с), подаваемых соответственно на первый и второй входы первого ключа 14. Ключ 14 работает таким образом, что при н;1личии на его первом входе импульсов ,
положительной полярности, а на втором счетных импульсов высокой частоты следования U также положительной полярности на выходе первого ключа формируются пачки счетных импульсов положительной полярности с числом импульсов в пачке, пропорциональным амплитуде сигнала ошибки преобразования U в момент равенства-ПС модулю напряжений Uj и и.„., , подаваемых на входы первоглин
го компаратора с противоположными знаками. Если же на первом входе первого ключа 14 появляются импульсы и/ (фиг, Зи) отрицательной полОМП
ляряости, что соответствует отрицательному значению ошибки преобразования US на выходе аналогового сумматора 12, а на втором входе первого ключа счетные импульсы жительны, то на выходе ключа 14 формируются пачки импульсных последовательностей Up, д отрицательной полярности (фиг.3м) за счет инвертирования, предусмотренной схемой ключа 14.
Счетные импульсы U подаются на реверсивный счетчик 15, в результате чего на его выходе с течением времени образуется числовая последовательность, которая может быть использована при сопряжении следящей системы с микропроцессором.Цифровое значение сигнала на выходе реверсивного счетчика 15 может изменяться на каждом такте преобразования при наличии ошибки преобразования иj, так как если Ug О, т.е. huM f и-ч указывает на несоответствие числового значения выхода
и
рсч
(фиг. Зо) реверсивного счетчика
15 аналоговому значению преобразуемого напряжения , то первый компаратор 13 и первый ключ 14 сформируют пачку импульсов на новом такте положительной полярности с числом импульсов, пропорциональным ошибке Vf на этом такте, которые, попадая на вход реверсивного счетчика 15, будут добавлены к предьщущему его показанию, значит числовое значение возрастет, приводя одновременно к увеличению значения U м, а следовательно, к уменьшению ошибки U§ . В случае, когда Ug О, т.е. ., первый компаратор 13 и первый ключ 14 как и ранее сформирует на новом такте иачку импульсов отрицательной полярности с числом импульсов,пропорциональным .,;шибкс Uj- на этом такте, которые будут вычтены из числен- НОГО значения показания счетчика на предыдущем такте. Процесс уравновешивания выходного показания реверсивного счетчика импульсов закончится, как только напряжение обратной связи контура преобразования U,, станет равным напряжению U, т.е. цифровое показание реверсивного счетчика будет точно соответствовать.(с учетом цены младшего разряда) величине рассогласования валов. Как видно, ошибка Ug в этом случае будет тождественно
равна нулю (иг. Зк) .
Ликвидация рассогласования валов в следящей системе производится подсистемой управления следующим образом. Напряжение с выхода преобразователя
16 по истечении времени Т . переходного процесса в канапе преобразования, протекающего почти мгновенн.о в электронных цепях его сравнения с электромеханическими процессами в канале управления, пропорциональное сигналу рассогласования механически несвязаннь Х валов, подается на первый вход второго компаратора 17, на второй вход которого подается пилообразное напряжение .ц , в результате чего после окончания указанного процесса на выходе второго компаратора 17 формируются широтно-модули- рованные импульсы (фиг.Зн) с шириной,
пропорциональной величине рассогласования валов (фиг.ЗБ) при t Т
пп
на каждом такте. Это последовательность импульсов подается на первый вход второго ключа 18. На второй его
вход посылаются высокочастотные импульсы с третьего выхода блока 10. Таким образом, на выходе, второго ключа 18 формируются пачки импульсов с числом в каждой пачке (фиг.Зр),пропорциональным ширине импульсов, формируемых вторым компаратором, т.е. сигнах у рассогласования &Ч при t Т. Полярность импульсов в пачке зависит от полярности широтно-модулированных
импульсов, т.е. техническая реализация второго компаратора и второго ключа аналогична реализации первого компаратора и первого ключа соответ- ственно. Наличие блока 10 способствует строгой синхронизации фронтов импульсов в контуре управления так же, как это имело место и в контуре преобразования. Пачки импульсов с выхода второго ключа 18 подаются на схему
управления 6, которая осуществляет распределение импульсов по обмоткам шагового двигателя. Исполнительный шаговый двигатель через редуктор в зависимости от полярности импульсов вращается в ту или иную сторону, ус устраняя рассогласование механически несвязанных валов. В случае, когда рассогласование становится равным нулю, значение U, , будет также равно нулю, что приведет к появлению нулевого значения на выходе реверсивного счетчика и соответственно на выходе ПКН, а это в свою очередь приведет к остановке шагового двигателя в требуемом положении, соответствующем нулевому рассогласованию.
Формула изобретени
Следящая система, содержащая источник напряжения переменого тока, подключенный к формирователю опорного напряжения и к элементу сравнения, вход которого связан через редуктор с валом шагового двигателя, входом подключенного к выходу блока управления, выход элемента сравнения подклюг1ен к входу усилителя, выход которого подключен через фазочувст8
выпрямитель к входу фильтчастот, отличающа
точности отработки задающего сигнала и расширения области применения системы, в нее введен блок импульсно- фазовой автоподстройки частоты,генератор линейно изменяющегося напряжения, первый компаратор, первый ключ, реверсивный счетчик, преобразователь код-напряжение, второй компаратор и второй ключ, причем выход преобразователя код - напряжение подключен к второму входу аналогового сумматора, к выходу формирователя опорного напряжения подключен блок импульсно-фазовой автоподстройки частоты, первый выход которого соединен с вторым входом фазочувствитель- ного выпрямителя, второй выход - с входом генератора линейно изменяющегося напряжения, выход которого соединен с вторыми входами первого и второго компаратора, а третий выход блока импульсно-фазовой автоподстройки частоты соединен с управляющими входами первого и второго ключей, вь5ход фильтра низких частот соединен с входом аналогового сумматора, выход второго ключа подключен к входу блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Устройство связи с дельта-модуляцией | 1986 |
|
SU1365364A1 |
| Телевизионное следящее устройство | 1982 |
|
SU1019672A2 |
| Аналого-цифровой преобразователь интегральных характеристик электрических величин | 1981 |
|
SU1035790A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| СИНТЕЗАТОР ЧАСТОТ | 2015 |
|
RU2595629C1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1425832A1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| Автоматический ультразвуковой расходомер | 1988 |
|
SU1506279A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
Изобретение относится к области- автоматического управления-и контроля, приборостроения и может быть использовано в различных устройствах автоматики и измерительной техники при контроле, измерении и регулировании различных параметров. Изобретение позволяет повысить точность обработки задающего сигнала в следящей системе и расширить ее область применения за счет применения в структуре системы кольца импульсно- фазовой автоподстройки частоты и реверсивного счетчика 15 импульсов. Такое техническое решение способствует строгой синхронизации передних фронтов импульсов в каналах измерения и управления благодаря организации новых связей с фазочувствительны- ми вьтрямителем 8, генератором 11 линейно изменяющегося напряжения, Аналоговым сумматором 12, двумя компараторами 13, 17, двумя ключами 1Д, 18, реверсивным счётчикбм 15 и пре- образователем 16 код-напряжение. Кроме того, применение в системе реверсивного счетчика создает условия для расширения функциональных возможностей системы в целом в смысле сопряжения следящей системы с микропроцессором или микроэвм. 3 ил. с «с (Я Ь СО о ю ел Фи.1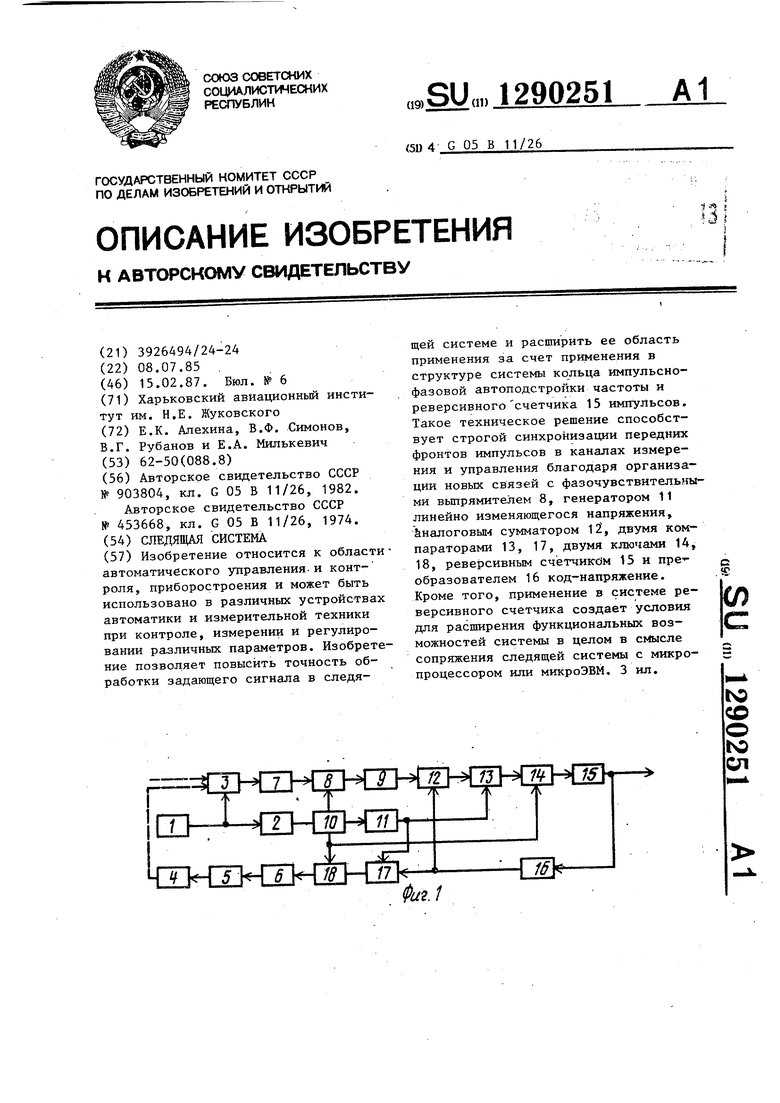
,бш.1
5X0
Вш.2
&Ш.З
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU453668A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
