Известны шагающие механизмы к самоходным повозкам, с расположенными по обеим сторонам повозки опорными башмаками, образуюшими с рамой повозки и элементами опирания повозки на башмак шарнирный четырехзвенник.
В описываемом шагающем механизме для увеличения маневренности (при сохранении его устййчивости) и для приведения в движение шарнирного четырехзвенника применен наклонно расположенный дополнительный гидравлический цилиндр, шарнирно сочлененный с рамой повозки и башмаком.
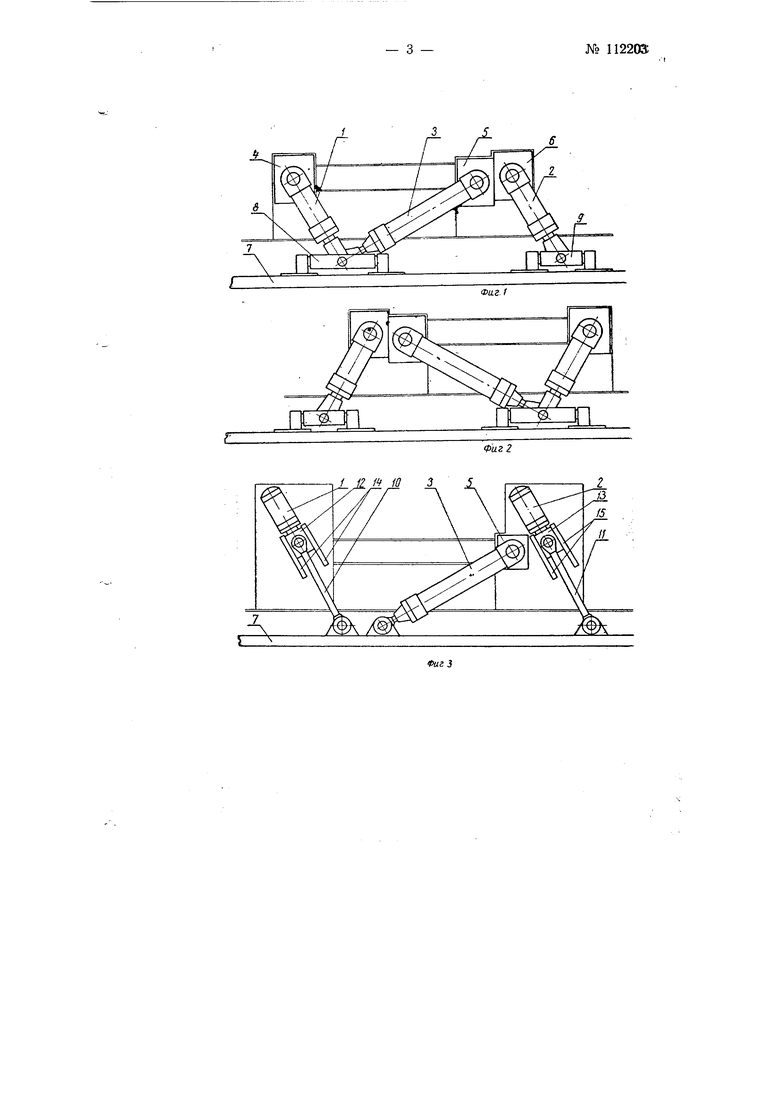
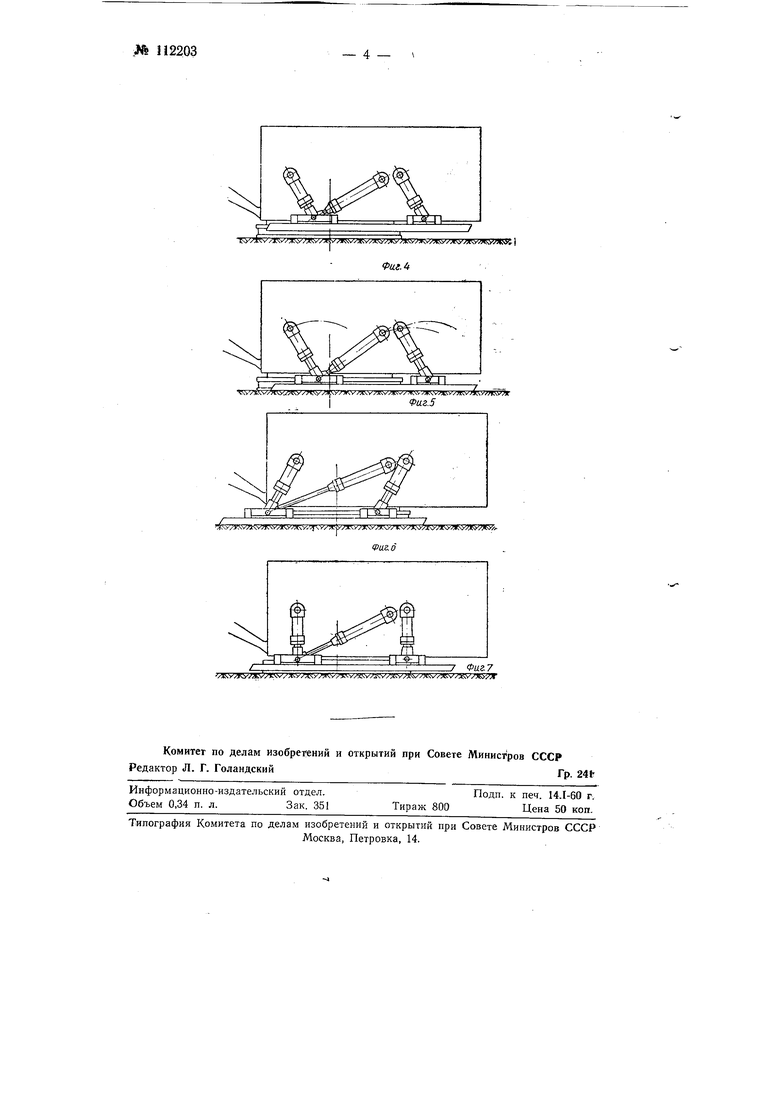
На фиг. 1 изображена схема шагающего механиз5 1а, расположенного справа по ходу повозки; на фиг. 2-схема шагающего механизма, расположенного слева; на фиг. 3-второй вариант выполнения механизма; на фиг. 4-механизм под нагрузкой (в применении к экскаватору-при копании); на фиг 5-то же перед шаганием; на фиг. 6-то же в конце шагания; на фиг. 7-то же, перед положением под нагрузкой.
Шагающий механизм представляет собою шарнирный четырехзвенник, выполненный с применением двух несущих гидравлических цилиндров 1 и 2 (фиг. 1) одного тягового гидроцилиндра 5, расположенного по диагонали четырехзвенника. Все цилиндры являются силовыми двухстороннего действия. Верхними концами цилиндры посредством подшипников 4,5 { 6 щарнирно сочленены с рамой повозки. Нижними концами цилиндры шарнирно связаны с опорным башмаком 7 посредством траверс 5 и Р. Цилиндры / и 5 отклонены от вертикального положения, оси их параллельны между собой.
В положении, принимаемом механизмом под нагрузкой (фиг.-4), поршни цилиндров втянуты, опорные башмаки висят над поверхностью грунта и повозка опирается на грунт при помощи опорной рамы.
Для передвижения повозки выдвигаются штоки несущих цилиндров, а тяговые цилиндры, поворачиваясь, опускают свои нижние концы до тех
№ 11.2203
пор, пока опорные башмаки коснутся грунта и механизм займет положание, принимаемое перед шаганием (фиг. 5). Затем выдвижение штоко несуших цилиндров прекрашается и начинается выдвижение штоков тяговых цилиндров. Так как опорные башмаки являются неподвижными относительно грунта, то повозка, поднимаясь на дуге окружности, совершает поступательное движение.
После того как несушие цилиндры займут вертикальное положение дальнейшее движение повозки происходит под действием собственного веса. В этот момент тяговые цилиндры, дросселируя жидкость, производят торможение и опускают повозку.
Когда опорная рама станет на грунт, механизм займет положение, принимаемое в конце шага (фиг. 6). После втягивания поршней несущих цилиндров механизм занимает положение, показанное на фиг. 7
Другой вариант выполнения механизма показан на фиг. 3, где элементы 10 и 11 четырехзвенника шарнирно сочленены с ползунами 12 и 13, монтированными в направляющих 14 и 15, рамы повозки, на которой также жестко монтированы цилиндры 1 и 2, а штоки их связаны с ползуН.ами.
Шагание этого механизма происходит так же, как и описанного механизма.
Предмет изобретения
1.Шагающий механизм к самоходной повозке с расположенными но обеим ее сторонам опорными башмаками, образующими с рамой повозки и несущими гидравлическими цилиндрами шарнирный четырг.чзвенник, отличающийся тем, что, с целью увеличения маневренности механизма и приведения в движение шарнирного четырехзвенника, .применен наклонно расположенный дополнительный гидравлический ци.линдр, шарнирно сочлененный с рамой повозки и башмаком.
2.Форма выполнения шагающего механизма к самоходной повозке по п. 1, отличающаяся тем, что концы элементов четырехзвенника сочленены с ползунами, монтированными в направляющие рамы, а гидравлические цилиндры жестко монтированы на раме повозки и связаны с ползунами своими штоками.
Приоритет п. 2-13 февраля 1956 г.
Фаг 2
/-;I J/ Фи.г.7
vr.va V g v«sv/aky7t4yxW...

| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 2012 |
|
RU2495562C1 |
| Механизм шатания для экскаваторов и других самоходных повозок | 1957 |
|
SU110400A1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| Механизм шагания экскаватора | 1979 |
|
SU829820A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| СЕКЦИЯ ГИДРАВЛИЧЕСКОЙ ШАГАЮЩЕЙ КРЕПИ | 1997 |
|
RU2133828C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2003 |
|
RU2239577C1 |