Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано в самоходных транспортных машинах с повышенными характеристиками маневренности.
Известны шагающие опоры для многоопорных шагающих машин и для транспортных средств повышенной проходимости, содержащие корпус с побортно установленными на нем двумя передними и двумя задними шагающими движителями, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа и снабженными передними и задними башмаками, соединенными жесткой связью, а также силовой привод с побортным управлением шагающими движителями (пат. РФ №2063353, М.кл. В 62 D 57/032, 1996 г.).
Недостатком данных шагающих опор является компоновочная схема с общей рамой, ограничивающая возможности шагающей опоры по адаптации к рельефу местности, что не позволяет совершать кинематически точный поворот шагающей опоры с малыми радиусами и снижает возможности адаптации к рельефу местности в условиях тяжелого грунта.
Наиболее близким по техническому уровню и достигаемому результату является шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с шагающими движителями, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа с криволинейными опорами, расположенных в вертикальной плоскости и снабженных башмаками, и силовой привод, кинематически связанный с шагающими движителями, установленными вдоль корпуса в виде несущей балки, посредством бортовых редукторов и карданных передач с ограничением возможности бортового поворота шагающей опоры (пат. РФ №2174085, М.кл. В 62 D 57/032, 2001 г.).
Недостатком данной шагающей опоры является компоновочная схема с общей рамой и побортно установленными вдоль несущей балки попарно расположенными шагающими движителями, связанными бортовым редуктором с силовым приводом, что не обеспечивает возможность кинематически точного поворота шагающей опоры, ограниченного бортовым поворотом опоры, и не позволяет выполнять поворот с плавным регулированием радиуса, тем самым снижаются эксплуатационные характеристики опоры.
Данная шагающая опора имеет сравнительно невысокий технический уровень, что обусловлено компоновочной схемой с общей рамой и побортно установленными шагающими движителями, связанными бортовыми редукторами с силовым приводом, что не обеспечивает возможности кинематически точного поворота и не позволяет плавно регулировать радиус поворота шагающей опоры, тем самым снижаются эксплуатационные характеристики по маневренности и возможности адаптации к рельефу местности.
В этой связи важнейшей задачей является создание новой компоновочной схемы взаимосвязи шагающих движителей с корпусом в виде двухсекционной рамы, соединенной межсекционным шарниром с двумя степенями свободы, образующей систему адаптации с возможностью пространственного смещения каждой из секций рамы, снабженной индивидуальной схемой управления для каждого из попарно установленных шагающих движителей и торсионным валом на задней секции, что обеспечивает новые кинематические взаимосвязи шагающих движителей при повороте с плавным регулированием радиуса и кинематически точный поворот шагающей опоры и позволяет создать новый тип транспортного средства повышенной проходимости для эксплуатации в условиях тяжелого и экологически ранимого грунта.
Техническим результатом заявленной конструкции шагающей опоры является создание новой компоновочной схемы, позволяющей создать систему адаптации устойчивого положения шагающих движителей, обеспечивающей возможность кинематически точного поворота и позволяющей плавно регулировать радиус поворота шагающей опоры, тем самым создана новая кинематическая схема шагающей опоры с уменьшением неравномерности нагрузки на каждый шагающий движитель, улучшаются эксплуатационные характеристики шагающей опоры по маневренности и возможности адаптации к рельефу местности.
Указанный технический результат достигается тем, что шагающая опора для транспортных средств повышенной проходимости содержит корпус с установленными на нем шагающими движителями, выполненными в виде четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные башмаками, и силовой привод, кинематически связанный с шагающими движителями, при этом корпус транспортного средства выполнен в виде двухсекционной рамы, на каждой из двух секций которой попарно установлены шагающие движители, соединенной межсекционным шарниром с двумя степенями свободы, образующей систему адаптации с возможностью пространственного смещения двух секций рамы, снабженную торсионным валом, установленным на задней секции и жестко закрепленным одним концом, второй конец которого связан с передней секцией посредством межсекционного шарнира, при этом каждый шагающий движитель индивидуально снабжен независимым управлением, обеспечивающим поворот передней балки на заданный угол при кинематически точном повороте.
Новая компоновочная схема шагающей опоры для транспортных средств, снабженная корпусом транспортного средства, выполненным в виде двухсекционной рамы с попарно установленными шагающими движителями и имеющей межсекционный шарнир с двумя степенями свободы, позволяет создать новый рабочий цикл с кинематически точным поворотом шагающей опоры, с плавным регулированием радиуса без буксования или проскальзывания, что обеспечивает получение новых технических характеристик шагающей опоры по маневренности, позволяя достичь новых эксплуатационных характеристик в условиях тяжелого грунта.
Введение новой системы адаптации с возможностью пространственного смещения двух секций рамы, снабженной торсионным валом, позволяет обеспечить установку одновременно четырех движителей на грунт за счет изгиба торсионного вала и поворота межсекционного шарнира и получить устойчивое расположение шагающей опоры при последовательном перемещении по грунту каждой опоры шагающих движителей, что позволяет создать новую кинематическую схему работы шагающей опоры с уменьшением неравномерности нагрузки на каждый шагающий движитель.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа как наиболее близкого по совокупности признаков аналога позволило выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию “новизна” по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию изобретательского уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию “изобретательский уровень”.
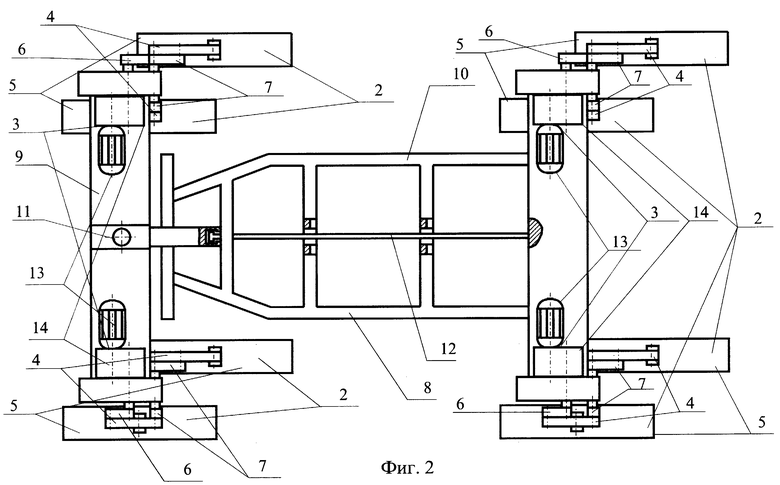
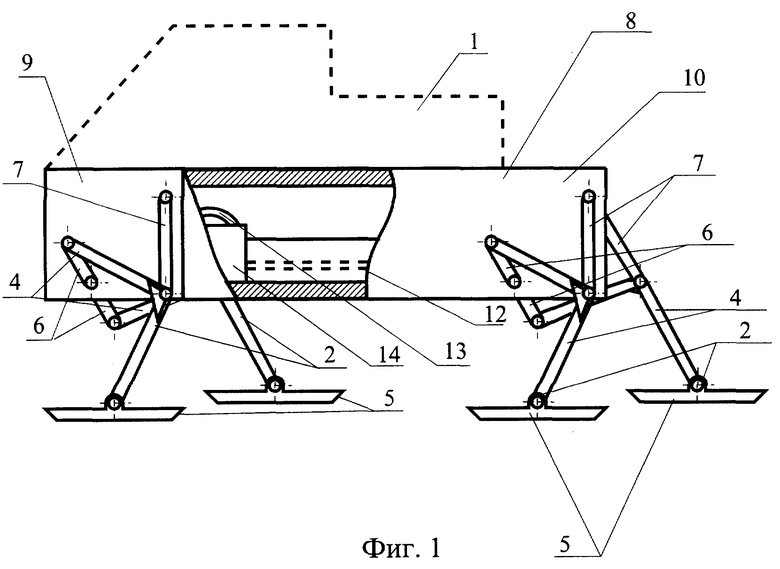
На фиг.1 представлен общий вид шагающей опоры; на фиг.2 - вид сверху на шагающую опору.
Шагающая опора для транспортного средства повышенной проходимости содержит корпус 1 с установленными на нем шагающими движителями 2 и силовой привод 3, кинематически связанный с шагающими движителями.
Шагающие движители 2 выполнены в виде шарнирных четырехзвенников лямбдаобразного типа, расположены в вертикальной плоскости и содержат криволинейные опоры 4, снабженные башмаками 5, шарнирно соединенные с кривошипами 6 и с качающимися рычагами 7. Свободные концы качающихся рычагов 7 шарнирно закреплены на корпусе 1.
Корпус 1 транспортного средства выполнен в виде двухсекционной рамы 8, которая состоит из передней секции 9 и задней секции 10, на каждой из которых попарно установлены шагающие движители 2. Секции соединены межсекционным шарниром 11 с двумя степенями свободы. Секции 9, 10 и шарнир 11 образуют систему адаптации к профилю грунта, обеспечивая пространственное смещение двух секций рамы (передней 9 и задней 10). Система адаптации снабжена торсионным валом 12, установленным на задней секции 10 и жестко закрепленным на ней одним концом. Другой конец вала связан с передней секцией 9 посредством межсекционного шарнира 11.
Двухсекционная рама 8 состоит из передней секции 9 и задней секции 10. На передней секции 9 слева и справа установлены две пары шагающих движителей 2, а также двигатели 13 и редукторы 14, индивидуальные для каждой пары шагающих движителей. На задней секции 10 слева и справа также установлены две пары шагающих движителей 2, двигатели 13 и редукторы 14, индививуальные для каждой пары шагающих движителей, снабженной независимым управлением. Такая компоновочная схема позволяет управлять каждой парой движителей индивидуально.
Две секции рамы - передняя 9 и задняя 10 - соединены межсекционным шарниром 11. Межсекционный шарнир 11 обладает двумя степенями свободы, обеспечивая поворот передней секции 9 относительно задней секции 10 вокруг вертикальной и продольной осей. Передняя секция 9, задняя секция 10 и межсекционный шарнир 11 образуют систему адаптации. Система адаптации снабжена торсионным валом 12. Торсионный вал 12 жестко закреплен одним концом на задней секции 10. Другой конец вала связан с межсекционным шарниром 11 и передней секцией 9. Торсионный вал обеспечивает возможность изгиба задней секции 10 вокруг продольной оси. Таким образом, система адаптации позволяет передней секции 9 шагающей опоры поворачиваться относительно задней секции 10, также позволяя задней секции изгибаться вокруг продольной оси, что обеспечивает одновременный контакт с грунтом четырех шагающих движителей.
Шагающие движители 2 попарно установлены вдоль корпуса 1, выполненного в виде двухсекционной рамы 8, и соединены кривошипами 6 с двигателями 13 посредством редукторов 14, которые совместно образуют силовой привод 3 шагающей опоры. Для чередования фазы опоры на грунт и фазы переноса кривошипы 6 каждого из пары шагающих движителей установлены со сдвигом по фазе на половину оборота ведущего вала кривошипа.
Система адаптации позволяет обеспечить одновременный контакт четырех башмаков 5 шагающих движителей 2 с грунтом, что позволяет улучшить управляемость, уменьшить удельное давление на грунт за счет увеличения общей площади опорных поверхностей башмаков 5, контактирующих с грунтом, что улучшает тягово-сцепные свойства транспортного средства и позволяет ему работать на слабых и экологически ранимых грунтах. Индивидуальное управление каждым движителем 2 и возможность поворота передней балки 9 позволяют выполнять кинематически точный поворот.
Шагающая опора для транспортных средств повышенной проходимости содержит корпус с установленными на нем шагающими движителями, выполненными в виде четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные башмаками, и силовой привод, кинематически связанный с шагающими движителями.
Корпус транспортного средства выполнен в виде двухсекционной рамы, на каждой из двух секций которой попарно установлены шагающие движители, соединенной межсекционным шарниром с двумя степенями свободы, образующей систему адаптации с возможностью пространственного смещения двух секций рамы.
Система адаптации снабжена торсионным валом, установленным на задней секции и жестко закрепленным одним концом, второй конец которого связан с передней секцией посредством межсекционного шарнира, при этом каждый шагающий движитель индивидуально снабжен независимым управлением, работающим таким образом, чтобы осуществлять поворот передней балки на заданный угол.
Шагающая опора работает следующим образом. В момент начала движения крутящий момент от двигателей 13 через редукторы 14 подается на кривошипы 6 шагающих движителей 2 (фиг.1, 2). Кривошипы 6 шагающих движителей 2 начинают вращаться и приводят в движение криволинейные опоры 4 и качающиеся рычаги 7, тем самым осуществляя движение шагающих движителей 2. При движении кривошипы 6 каждого из пары шагающих движителей установлены со сдвигом по фазе на половину оборота ведущего вала кривошипа, чем обеспечивается чередование фазы опоры на грунт и фазы переноса. При этом один из шагающих движителей 2 каждой каждой пары находится в фазе опоры на грунт. Благодаря взаимодействию башмака 5 шагающего движителя 2, находящегося в фазе опоры, с грунтом шагающая опора начинает движение.
Новая компоновочная схема шагающей опоры для транспортных средств, снабженная корпусом транспортного средства, выполненным в виде двухсекционной рамы с попарно установленными шагающими движителями и имеющей межсекционный шарнир с двумя степенями свободы, позволяет создать новый рабочий цикл с кинематически точным поворотом шагающей опоры с плавным регулированием радиуса без буксования или проскальзывания, что обеспечивает получение новых технических характеристик шагающей опоры по маневренности, позволяя достичь новых эксплуатационных характеристик в условиях тяжелого грунта.
Введение новой системы адаптации с возможностью пространственного смещения двух секций рамы, снабженной торсионным валом, позволяет обеспечить установку одновременно четырех движителей на грунт за счет изгиба торсионного вала и поворота межсекционного шарнира и получить устойчивое расположение шагающей опоры при последовательном перемещении по грунту каждой опоры шагающих движителей, что позволяет создать новую кинематическую схему работы шагающей опоры с уменьшением неравномерности нагрузки на каждый шагающий движитель.
При прямолинейном движении шагающей опоры шагающие движители 2 последовательно совершают рабочий цикл, включающий фазу опоры на грунт и фазу переноса. Полный рабочий цикл (шаг) совершается за один оборот вала редуктора 14, соответствующий одному обороту кривошипа 6 шагающего движителя 2.
Каждую половину цикла работы шагающей опоры можно подразделить на следующие три основные стадии:
- первый шагающий движитель 2 находится в фазе опоры на грунт в начале рабочего участка траектории опорной точки, второй - в конце фазы опоры на грунт и совместно с первым шагающим движителем 2 осуществляет рабочий ход;
- первый шагающий движитель 2 продолжает находиться в фазе опоры на грунт и продолжает осуществлять рабочий ход, второй - начинает фазу переноса;
- первый шагающий движитель 2 находится в фазе опоры на грунт, второй - завершает фазу переноса, входит в зацепление с грунтом и начинает осуществлять вместе с первым шагающим движителем 2 рабочий ход.
После достижения вторым шагающим движителем точки зацепления с грунтом начинается вторая половина рабочего цикла, аналогичная первой. При этом первый шагающий движитель меняется местом со вторым.
После завершения полного рабочего цикла он повторяется.
Введенный рабочий цикл шагающей опоры позволяет в качестве рабочего участка взять ту часть траектории, где она близка к горизонтальной и где движение опорной точки по траектории практически равномерно. Это резко снижает неравномерность курсового перемещения шагающей опоры, а также сводит к минимуму вертикальные перемещения ее корпуса в каждом цикле движения.
При движении вертикальные колебания корпуса 1 шагающей опоры за счет угловых деформаций торсионного вала 12 сглаживаются. Система адаптации, снабженная торсионным валом 12, жестко закрепленным одним концом на задней секции 10, а другим концом связанным с межсекционным шарниром 11 и передней секцией 9, позволяет передней секции 9 шагающей опоры поворачиваться относительно задней секции 10, также обеспечивая изгиб задней секции вокруг продольной оси, что гарантирует одновременный контакт с грунтом четырех шагающих движителей. В результате улучшается маневренность и снижаются энергозатраты на передвижение транспортного средства. Система адаптации повышает возможности шагающей опоры по адаптации к неровностям грунта, уменьшает среднее давление на грунт и улучшает тягово-сцепные свойства шагающей опоры за счет лучшего сцепления с грунтом. Это повышает возможности шагающей опоры по проходимости на тяжелых грунтах и дает возможность работать на экологически ранимом почвенном покрове.
При осуществлении поворота, например, влево оператор посредством системы управления дает команду на изменение скорости вращения ведущих валов шагающих движителей. В результате каждая из четырех пар шагающих движителей начинает двигаться со скоростью, отличающейся от скорости других пар, и передняя секция 9 начинает поворачиваться относительно задней секции 10 вокруг шарнира 11. По достижении заданного угла поворота передней секции 9 относительно задней секции 10 оператор посредством системы управления дает команду на прекращение режима входа в поворот и совершение установившегося поворота. Этим устанавливаются такие скорости вращения ведущих валов кривошипов шагающих движителей, чтобы поворот происходил без проскальзывания и буксования, т.е. являлся идеальным кинематическим поворотом.
Таким образом, вышеуказанные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
- шагающая опора для транспортных средств повышенной проходимости предназначена для применения в многоопорных транспортных и транспортно-технологических средствах и позволяет создать новый рабочий цикл с кинематически точным поворотом шагающей опоры, с плавным регулированием радиуса без буксования или проскальзывания, что обеспечивает получение новых технических характеристик шагающей опоры по маневренности, позволяя достичь новых эксплуатационных характеристик в условиях тяжелого грунта;
- для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных конструктивных решений и способов применения;
- шагающая опора для транспортных средств повышенной проходимости, воплощенная в заявленном изобретении, при его осуществлении способна обеспечить достижение усматриваемого заявителем достигаемого технического результата.
Следовательно, заявленное изобретение соответствует требованию “промышленная применимость”.
Шагающая опора содержит корпус с установленными на нем шагающими движителями, выполненными в виде четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные башмаками, и силовой привод, кинематически связанный с шагающими движителями. Корпус транспортного средства выполнен в виде двухсекционной рамы, на каждой из двух секций которой попарно установлены шагающие движители, соединенной межсекционным шарниром с двумя степенями свободы, образующей систему адаптации с возможностью пространственного смещения двух секций рамы, снабженную торсионным валом, установленным на задней секции и жестко закрепленным на ней одним концом, второй конец которого связан с передней секцией посредством межсекционного шарнира. При этом каждый шагающий движитель индивидуально выполнен с независимым управлением, обеспечивающим поворот передней балки на заданный угол при кинематически точном повороте. В результате улучшаются эксплуатационные характеристики шагающей опоры по маневренности и возможности адаптации к рельефу местности. 2 ил.
Шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с установленными на нем шагающими движителями, выполненными в виде четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные башмаками, и силовой привод, кинематически связанный с шагающими движителями, отличающаяся тем, что корпус транспортного средства выполнен в виде двухсекционной рамы, на каждой из двух секций которой попарно установлены шагающие движители, соединенной межсекционным шарниром с двумя степенями свободы, образующей систему адаптации с возможностью пространственного смещения двух секций рамы, снабженную торсионным валом, установленным на задней секции и жестко закрепленным одним концом, второй конец которого связан с передней секцией посредством межсекционного шарнира, при этом каждый шагающий движитель индивидуально выполнен с независимым управлением, обеспечивающим поворот передней балки на заданный угол при кинематически точном повороте.
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2174085C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 4527650 A, 09.07.1985. | |||

