Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано в самоходных многоопорных транспортных средствах с шагающими движителями.
Известны шагающие опоры для многоопорных самоходных машин и для транспортных средств повышенной проходимости, выполненные в виде шагающей опоры, содержащей несущий корпус, на котором с каждого борта установлены шагающие движители в виде шарнирных четырехзвенников лямбдаобразного типа, снабженные общим башмаком, а также силовой привод и самоблокирующийся межосевой дифференциал (Патент РФ №2063353, М. кл. В62D 57/032, 1996 г.).
Недостатками данных шагающих опор являются сравнительно невысокая профильная проходимость, обусловленная использованием цикловых шагающих движителей и компоновочная схема с межбортовой дифференциальной связью, не обеспечивающая возможность плавного регулирования радиуса поворота.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры для транспортных средств повышенной проходимости. Шагающая опора содержит корпус с побортно установленными на нем шагающими движителями с моделируемой траекторией шага, выполненными в виде плоских шарнирных четырехзвенников лямбдаобразного типа и снабженные бортовыми механизмами адаптации и поворота шагающей опоры. Бортовые механизмы адаптации и поворота снабжены поворотной коленчатой осью, общей для каждой пары шагающих движителей, при этом оси подвеса качающихся рычагов шагающих движителей шарнирно закреплены на поворотной коленчатой оси. Управление траекторией опорных точек шагающих движителей и регулирование длины и высоты моделируемого шага обеспечивается путем поворота коленчатой оси и симметричного смещения положения осей подвеса качающихся рычагов каждой пары шагающих движителей, посредством силового гидроцилиндра (Патент РФ №2207283, М. кл. В62D 57/032, 2001 г.).
Недостатками данной шагающей опоры являются сравнительно невысокая профильная проходимость, обусловленная использованием простейших цикловых шагающих движителей лямбдаобразного типа, обеспечивающих сравнительно небольшую высоты подъема башмака в фазе переноса и ограниченная маневренность шагающей опоры - из-за малого диапазона изменения длины шага при повороте.
Данная шагающая опора имеет сравнительно невысокий технический уровень, что обусловлено использованием шагающих движителей циклового типа. Наличие у известной шагающей опоры движителей, которые не могут обеспечить в достаточно широких пределах регулирование длины и высоты шага, снижает ее возможности по адаптации к неровностям грунта, профильной проходимости, что не позволяет ей достаточно эффективно работать в зоне завалов и других подобных условиях. Смена направления движения и поворот известной шагающей опоры осуществляется бортовым способом и требует повышенных энергозатрат на преодоление момента сопротивлению повороту и реализуется не на всех грунтах. В результате имеет место ограниченная маневренность шагающей опоры.
В этой связи важнейшей задачей является создание многофункциональной компоновочной схемы шагающей опоры с возможностью управления положением корпуса в ходе преодоления локальных препятствий и значительным увеличением зоны возможного переноса опорных точек цикловых шагающих движителей, а также с возможностью смены направления движения с минимальными энергозатратами, на базе новой системы преодоления локальных препятствий с принципиально новым рабочим циклом шагающих движителей в режиме преодоления препятствий и маневрировании, на основе совместной работы нового механизма смены направления движения и шагающих движителей различных типов, что значительно повышает профильную проходимость шагающей опоры и обеспечивает улучшение ее маневренности, тем самым повышаются эксплутационные возможности транспортного средства.
Техническим результатом заявленной конструкции шагающей опоры является создание многофункциональной компоновочной схемы с возможностью управления положением корпуса в ходе преодоления локальных препятствий и возможностью смены направления движения с минимальными энергозатратами на базе новой системы преодоления локальных препятствий, с принципиально новым рабочим циклом шагающих движителей в режиме преодоления препятствий и маневрировании, на основе совместной работы нового механизма смены направления движения шагающей опоры и шагающих движителей различных типов: основных - циклового типа и дополнительных - ортогонального типа, что значительно повышает профильную проходимость шагающей опоры и обеспечивает улучшение ее маневренности, тем самым значительно улучшаются эксплутационные характеристики шагающей опоры.
Указанный технический результат достигается тем, что шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с побортно установленными на нем шагающими движителями курсового движения, выполненными в виде плоских шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные лыжеобразными башмаками, шарнирно связанные с кривошипами и с качающимися рычагами, свободные концы которых соединены с корпусом, а также силовой привод курсового движения, кинематически связанный с шагающими движителями, содержит дополнительную систему преодоления локальных препятствий, включающую в себя передние шагающие движители курсового движения циклового типа и механизм смены направления движения шагающей опоры, содержащий поворотную платформу, установленную в горизонтальной плоскости под корпусом шагающей опоры и оборудованную поворотным реверсивным силовым приводом, а также дополнительные побортно установленные шагающие движители ортогонального типа, выполненные, например в виде попарно сгруппированных ног в виде гидроцилиндров с независимым гидроприводом, концы которых с одной стороны жестко соединены непосредственно с поворотной платформой, один жестко, второй шарнирно, а с другой стороны шарнирно связаны с проушинами общего для каждой пары ног дополнительного башмака лыжеобразной формы.
Создание принципиально новой многофункциональной компоновочной схемы с дополнительной системой преодоления локальных препятствий, образованной на базе шагающих движителей различных типов, позволяет реализовать новый рабочий цикл шагающих движителей в режиме преодоления препятствий с возможностью управления положением корпуса и значительным увеличением зоны возможного переноса опорных точек цикловых шагающих движителей курсового движения, что обеспечивает высокую профильную проходимость шагающей опоры.
Введение в шагающую опору нового механизма смены направления движения шагающей опоры с возможностью смены направления движения с минимальными энергозатратами на базе дополнительных шагающих движителей ортогонального типа, одновременно входящих и в систему преодоления локальных препятствий, и поворотной платформы, установленной под корпусом шагающей опоры, обеспечивает улучшение ее поворотливости, тем самым значительно улучшается маневренность шагающей опоры.
Использование в шагающей опоре дополнительных попарно сгруппированных ног ортогонального типа, оборудованных независимым приводом, обеспечивает дополнительную связь корпуса шагающей опоры с опорной поверхностью, что позволяет обеспечить устойчивость шагающей опоры при работе бортового технологического оборудования в условиях сложного рельефа местности, а также позволяет организовать систему горизонтирования корпуса.
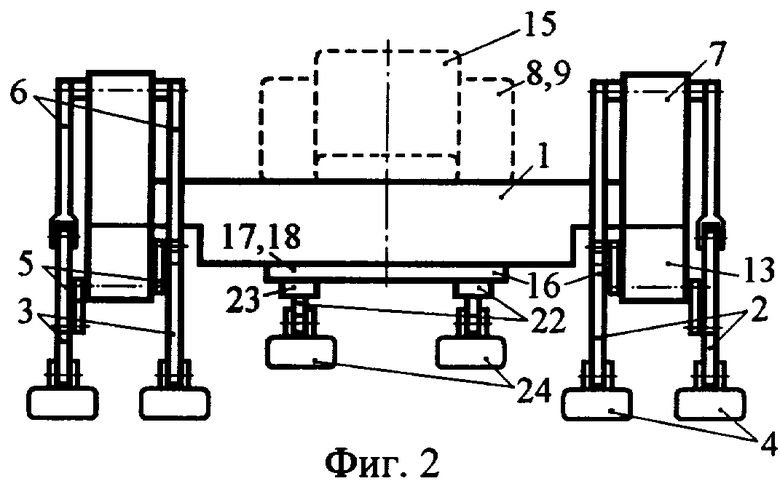
На фиг.1 представлен общий вид шагающей опоры; фиг.2 - ее вид слева; фиг.3 - относительная траектория опорной точки шагающего движителя курсового движения (точки на траектории расположены через 1/24 периода цикла, точки с заливкой соответствуют опорной фазе); фиг.4 - фазы рабочего цикла при совместной работе шагающих движителей курсового движения и системы преодоления локальных препятствий; фиг.5 - типовой алгоритм преодоления шагающей опорой выступающего препятствия; фиг.6 - типовой алгоритм преодоления шагающей опорой траншеи.
Шагающая опора для транспортных средств повышенной проходимости содержит корпус 1, выполненный в виде рамы, с побортно установленными на нем шагающими движителями 2 курсового движения (фиг.1, 2).
Шагающие движители 2, циклового типа, выполнены в виде плоских шарнирных четырехзвенников лямбдаобразного вида, расположенных в вертикальной плоскости и содержащих криволинейные опоры 3, снабженные лыжеобразными башмаками 4, шарнирно связанные с ведущими кривошипами 5 и с качающимися рычагами 6, свободные концы которых соединены с корпусом 1. Шагающие движители 2 расположены попарно с внешней и внутренней стороны несущих балок 7 правого и левого бортов корпуса 1 шагающей опоры. Для чередования опорной фазы и фазы переноса кривошипы 5 каждой пары шагающих движителей 2 установлены со сдвигом по фазе на пол-оборота. Это обеспечивает устойчивость шагающей опоры в процессе движения.
Для привода шагающих движителей 2 шагающая опора снабжена силовым приводом 8 курсового движения, который кинематически связан с ведущими кривошипами 5.
Силовой привод 8, может включать в себя, автономный источник электрического тока, например бензогенератор 9 и бортовые силовые приводы 10, расположенные на несущих балках 7 корпуса 1 и состоящие из тяговых электродвигателей 11, раздаточных редукторов 12 и двух бортовых редукторов 13, соединенных с раздаточным редуктором 12 посредством карданных валов 14 и кинематически связанных с ведущими кривошипами 5 шагающих движителей 2 одного борта.
Автономный источник электрического тока может быть установлен на корпусе 1, либо может располагаться вне шагающей опоры и быть с ней связан посредством силового кабеля. На корпусе 1 также может быть расположено рабочее место оператора 15 с блоком системы управления.
Шагающая опора дополнительно может комплектоваться различным сменным технологическим оборудованием, которое также размещается на корпусе 1.
Для повышения профильной проходимости шагающая опора снабжена системой преодоления локальных препятствий 16, включающей в себя передние шагающие движители 2 курсового движения циклового типа и дополнительный механизм смены направления движения 17, предназначенный, кроме того, для поворота и изменения направления движения шагающей опоры.
Введение в шагающую опору системы преодоления локальных препятствий 16, обеспечивает создание многофункциональной компоновочной схемы шагающей опоры с возможностью управления положением корпуса 1 в ходе преодоления препятствий и значительным увеличением зоны возможного переноса опорных точек башмаков 4 шагающих движителей 2 курсового движения, чем обеспечивается повышенная профильная проходимость шагающей опоры.
Механизм смены направления движения 17 содержит поворотную платформу 18, установленную в горизонтальной плоскости под корпусом 1 шагающей опоры, оборудованную поворотным силовым приводом 19 реверсивного типа, выполненного в виде электродвигателя 20 и редуктора 21, а также дополнительные побортно установленные шагающие движители 22 ортогонального типа, выполненные, например в виде попарно сгруппированных ног 23 в виде гидроцилиндров с независимым гидроприводом, концы которых с одной стороны соединены непосредственно с поворотной платформой 18 - один жестко, второй шарнирно, а с другой стороны шарнирно связаны с проушинами общего для каждой пары ног дополнительного башмака 24 лыжеобразной формы.
Введение в шагающую опору механизма смены направления движения 17, позволяет изменять направления движения шагающей опоры с минимальными энергозатратами, что обеспечивает улучшение ее маневренности.
Дополнительные ноги 23 ортогонального типа механизма смены направления движения 17, кроме того, образуют совместно с основными шагающими движителями 2 систему горизонтирования корпуса 1, обеспечивающую возможность установки на шагающую опору мощного погрузочного технологического оборудования.
Шагающая опора для транспортных средств повышенной проходимости работает следующим образом.
В момент начала движения крутящий момент от тяговых электродвигателей 11 бортовых силовых приводов 10 шагающей опоры через раздаточные редукторы 12 и бортовые редукторы 9 подается на кривошипы 5 шагающих движителей 2 курсового движения (фиг.1, 2). Кривошипы 5 шагающих движителей 2 начинают вращаться и приводят в движение криволинейные опоры 3 и качающиеся рычаги 6, тем самым осуществляя движение шагающих движителей 2. Поскольку, как минимум, один из каждой пары шагающих движителей 2 находится в опоре на грунт, то за счет взаимодействия башмаков 4 указанных шагающих движителей 2 с грунтом шагающая опора начинает движение.
При движении шагающей опоры в маршевом режиме (по сравнительно ровной поверхности) шагающие движители 2 курсового движения последовательно совершают рабочий цикл, включающий фазу опоры на грунт и фазу переноса. При этом дополнительные шагающие движители 22 ортогонального типа, входящие в систему преодоления локальных препятствий 16, находятся в транспортном положении и в обеспечении движения не участвуют.
Полный рабочий цикл (2 шага) маршевого режима движения осуществляется за один оборот ведущих кривошипов 5 шагающих движителей 2. Один шаг (половину цикла работы) каждой пары шагающих движителей 2, работающих в противофазе, в этом случае можно подразделить на следующие три основных этапа (фиг.3):
- первый шагающий движитель 2 каждой пары шагающих движителей курсового движения находится в точке А траектории в начале фазы опоры на грунт, второй - в конце фазы опоры на грунт в точке В траектории и совместно с первым шагающим движителем 2 осуществляет рабочий ход шагающей опоры;
- первый шагающий движитель продолжает находиться в фазе опоры на грунт (участок АВ траектории) и продолжает осуществлять рабочий ход, второй - проходит точку В траектории и начинает фазу переноса (участок CD траектории);
- первый шагающий движитель находится в конце фазы опоры на грунт, его опорная точка приближается к точке В траектории, при этом он продолжает осуществлять рабочий ход, второй - завершает фазу переноса, проходит точку D траектории и начинает входить в зацепление с грунтом.
После достижения опорной точки второго шагающего движителя 2 точки А траектории начинается вторая половина рабочего цикла, аналогичная первой. При этом первый шагающий движитель 2 каждой пары шагающих движителей 2 курсового движения меняется местом со вторым. После завершения полного рабочего цикла маршевого режима движения он повторяется.
Указанный рабочий цикл обеспечивает максимальную длину шага и максимальную скорость передвижения. Высота шага в этом режиме сравнительно невелика. При этом энергозатраты на вертикальные колебания корпуса 1 в каждом цикле движения, обусловленные шагающим способом передвижения, минимальны. С другой стороны небольшая высота шага обуславливает низкую профильную проходимость.
При движении шагающей опоры по неорганизованной поверхности со значительными неровностями оператор транспортного средства включает привод системы преодоления локальных препятствий 16. Она обеспечивает подъем корпуса 1 при преодолении препятствий, а также поворот машины при смене направления движения. Это приводит к изменению рабочего цикла - имеет место совместная работа основных шагающих движителей 2 и дополнительных движителей 22 ортогонального типа, чем обеспечивается возможность управления положением корпуса 1 в ходе преодоления препятствий. В результате значительно увеличивается зона возможного переноса опорных точек башмаков 4 шагающих движителей 2 курсового движения и увеличивается профильная проходимость шагающей опоры.
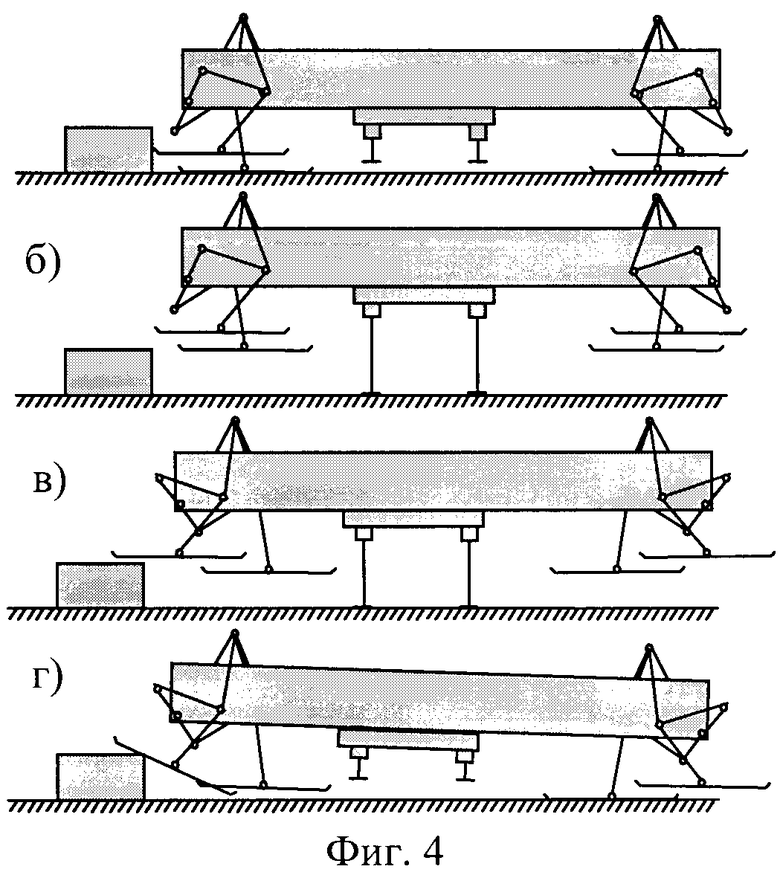
При совместной работе шагающих движителей 2 курсового движения и системы преодоления локальных препятствий 16 рабочий цикл можно подразделить на несколько фаз (фиг.4). Фазы рабочего цикла в этом случае включают:
- остановку машины перед препятствием (фиг.4а);
- подъем корпуса 1 посредством шагающих движителей 22 ортогонального типа, лыжеобразные башмаки 24 которых сориентированы в соответствии с профилем поверхности (фиг.4б);
- включение силового привода 8 курсового движения и перенос башмаков 4 передних шагающих движителей 2 в положение над препятствием (фиг.4в);
- опускание корпуса 1 машины с помощью шагающих движителей 22 ортогонального типа на опоры шагающих движителей 2 и продолжение курсового движения (фиг.4г).
После преодоления передними (носовыми) шагающими движителями 2 препятствия и достижения препятствия задними (кормовыми) шагающими движителями 2 рабочий цикл повторяется.
Указанный рабочий цикл обеспечивает меньшую среднюю скорость передвижения, но возможности по адаптации к неровностям грунта и высота переноса опорных точек при этом увеличивается. Эти шаги обуславливают высокую профильную проходимость. С другой стороны, имеют место повышенные энергозатраты на подъем корпуса 1 шагающей опоры в каждом цикле (шаге) движения. Поэтому использовать этот режим при движении по сравнительно ровной поверхности нецелесообразно.
Преодоление препятствия с ходу в рассматриваемом режиме движения не всегда возможно. Задача управления при движении в рассматриваемом режиме в общем случае сводится к следующему. При приближении к препятствию система управления или оператор машины определяет тип препятствия, возможность его преодоления и принимает решение о продолжении движения. Если не удалось преодолеть препятствие с ходу - башмак 4 уперся в препятствие, о чем будет, например свидетельствовать рост тока в цепи тягового электродвигателя 11, система управления должна обеспечить отключение бортового силового привода 10. Для преодоления препятствия башмак 4 должен занять позицию непосредственно перед препятствием. Поэтому дальнейшая задача управления состоит в согласованной организации движения шагающих движителей 2 курсового движения, дополнительных шагающих движителей 22 ортогонального типа и механизма смены направления движения 17 с целью обеспечения наиболее выгодного положения одного из башмаков 4 перед препятствием. После реализации наиболее выгодной позиции относительно препятствия осуществляется очередная попытка преодоления препятствия. Если она окажется неудачной, то водителем или системой управления должно быть принято альтернативное решение по преодолению препятствия (например, его объезд).
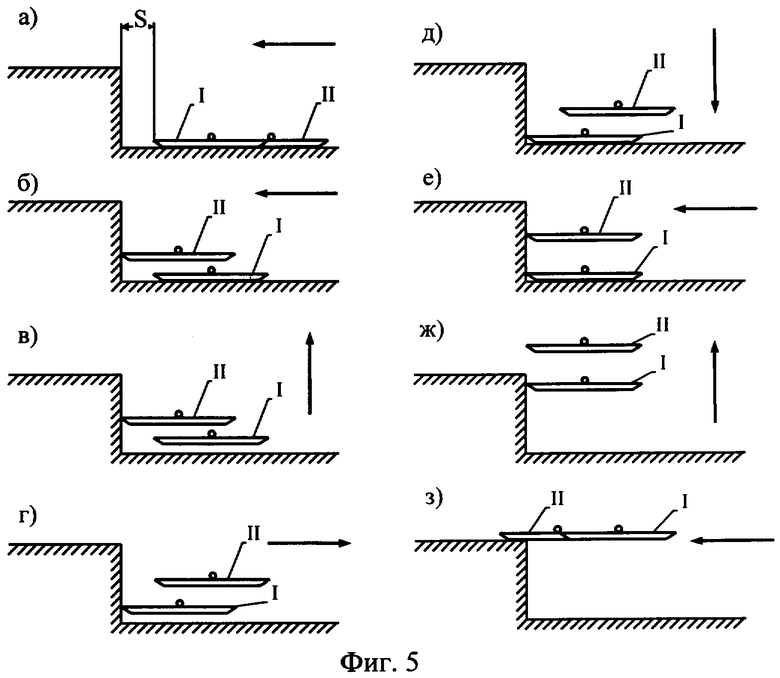
Рассмотрим типовые алгоритмы преодоления препятствий шагающей опорой (фиг.5, 6).
Для того, чтобы преодолеть выступающее препятствие максимально возможной высоты (фиг.5), необходимо, чтобы взаимодействие с грунтом башмака 4 переднего шагающего движителя 2 начиналось непосредственно перед препятствием. В общем случае такая ситуация не реализуется при курсовом движении и башмак 4 шагающего движителя 2 занимает положение на грунте на некотором расстоянии S от препятствия (фиг.5а). Тогда башмак 4 смежного шагающего движителя 2 во время переноса упирается в препятствие и силовой привод 8 курсового движения, например, по росту тока в цепи тяговых электродвигателей 11, отключается (фиг.5б).
Следующий этап алгоритма управления состоит в подъеме корпуса 1 машины дополнительными шагающими движителями 22 ортогонального типа, выполненными в виде попарно сгруппированных ног 23 в виде гидроцилиндров с независимым гидроприводом, до отрыва башмаков 4 от грунта (фиг.5в).
После этого включается силовой привод 8 курсового движения в реверсивном режиме до соприкосновения башмака 4 с препятствием (фиг.5г).
На следующем этапе корпус 1 шагающей опоры посредством ног 23, выполненных в виде гидроцилиндров, опускается на грунт башмаками 4 основных шагающих движителей 2 курсового движения (фиг.5д).
Затем вновь включается силовой привод 8 шагающих движителей 2 курсового движения до момента соприкосновения башмака 4 с препятствием (фиг.5е).
Потом силовой привод 8 курсового движения выключается, включается гидропривод шагающих движителей 22 до достижения башмаков 4 в вертикальном направлении положения над препятствием (фиг.5ж).
После этого снова включается силовой привод 8 курсового движения, в результате чего стопа 2 занимает положение над препятствием (фиг.5з) и машина, посредством гидроцилиндров дополнительных ног 23 опускается на опорные точки башмаков 4 шагающих движителей 2. При этом носок башмака 4 одного из передних шагающих движителей 2 будет оставаться на препятствии, что обеспечивает его успешное преодоление при дальнейшем движении машины в курсовом направлении.
Кормовые шагающие движители 2 преодолевают уступ аналогично.
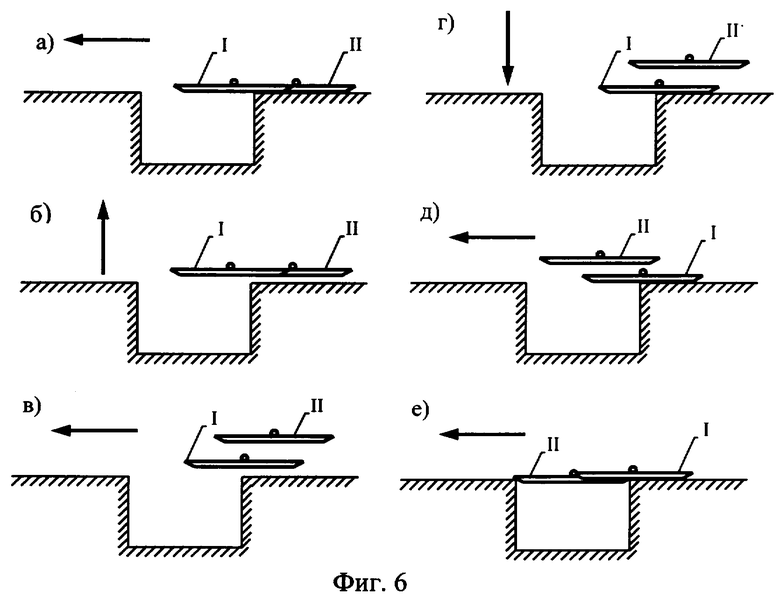
При преодолении траншеи максимально допустимой ширины (фиг.6) необходимо, чтобы взаимодействие с грунтом башмака 4 очередного шагающего движителя 2 курсового движения происходило таким образом, чтобы половина длины башмака располагалась над траншеей.
Однако, в общем случае, башмак 4 может опуститься на грунт так, что более половины длины башмака оказывается над траншеей (фиг.6а). В этом случае, чтобы не потерять устойчивость, силовой привод 8 курсового движения машины (например, по углу поворота стопы) отключается.
Затем включается гидропривод ортогональных шагающих движителей 22 (фиг.6б).
После отрыва башмаков 4 от грунта силовой привод 8 курсового движения вновь включается (фиг.6в) и работает до тех пор, пока центр башмака 4 не окажется над краем траншеи.
На заключительном этапе машина опускается на шагающие движители 2 (фиг.6г), за счет работы гидропривода дополнительных ног 23 и снова начинает курсовое движение (фиг.6д).
Длина лыжеобразной стопы должна быть больше длины шага. В этом случае башмак 4 очередного шагающего движителя 2, опускаясь на грунт, полностью перекрывает траншею шириной, равной длине шага (фиг.6е).
Кормовые шагающие движители 2 преодолевают траншею аналогично.
Таким образом, совместная работа основных шагающих движителей 2 курсового движения и дополнительных шагающих движителей 22 ортогонального типа механизма смены направления движения 17 шагающей опоры позволяет оператору управлять положением опорных точек цикловых шагающих движителей 2 и регулировать высоту шага в зависимости от условий движения. Это существенно повышает профильную проходимость шагающей опоры и дает ей возможность работать в условиях сильно неорганизованной поверхности.
Поворот шагающей опоры в маршевом режиме движения осуществляется бортовым способом с фиксированными радиусами R=0 и R=В/2, где В - колея машины, за счет остановки или реверсивного движения силового привода 10 отстающего борта. Бортовой поворот с такими малыми радиусами реализуется по сцеплению не на всех грунтах и требует повышенных энергозатрат. Так же, при таком повороте разрушается экологически ранимый верхний почвенный слой, из-за скольжения стоп по грунту.
Помимо бортового поворота, шагающая опора может осуществить смену направления движения с помощью механизма смены направления движения 17, входящего в систему преодоления локальных препятствий 16. Дополнительные побортно установленные шагающие движители 22 ортогонального типа, выполненные в виде попарно сгруппированных ног 23 в виде гидроцилиндров с независимым гидроприводом, позволяют вывесить корпус 1 машины и повернуть его на поворотной платформе 18, установленной под корпусом 1 шагающей опоры, посредством поворотного силового привода 19 на требуемый угол с нулевым радиусом.
В условиях неорганизованной поверхности алгоритм работы приводов при смене направления движения шагающей опоры предполагает выполнение следующих процедур:
- ориентацию лыжеобразных башмаков 24 дополнительных шагающих движителей 22 ортогонального типа по касательным к изогипсам опорной поверхности за счет работы поворотного силового привода 19 поворотной платформы 18 механизма смены направления движения 17;
- вывешивание корпуса 1 машины в горизонтальном положении на дополнительных ногах 23 за счет независимой работы их гидроприводов;
- поворот корпуса 1 машины на требуемый угол относительно грунта за счет работы поворотного силового привода 19 поворотной платформы 18;
- опускание машины на башмаки 4 основных шагающих движителей 2 курсового движения за счет работы гидроприводов ног 23, выполненных в виде гидроцилиндров;
- ориентацию лыжеобразных башмаков 24 ног 23 дополнительных побортно установленных шагающих движителей 22 ортогонального типа в исходное транспортное положение за счет работы поворотного силового привода 19 поворотной платформы 18;
- продолжение курсового движения в требуемом направлении.
Таким образом, механизм смены направления движения 17 шагающей опоры позволяет оператору изменять направление движения в пределах 360°. Это существенно повышает маневренность транспортного средства и дает ему возможность работать в условиях сильно неорганизованной поверхности.
С энергетической точки зрения бортовой поворот предпочтителен при повороте на малый угол. При больших углах поворота более выгодна смена направления движения с помощью механизма смены направления движения 17.
Дополнительные побортно установленные шагающие движители 22 ортогонального типа, выполненные в виде попарно сгруппированных ног 23 в виде гидроцилиндров с независимым гидроприводом, также позволяют организовать систему горизонтирования корпуса 1. При неработающем силовом приводе 8 горизонтальность корпуса 1 достигается путем индивидуального регулирования длины ног 23 посредством их независимых гидроприводов. Это позволяет варьировать высоту каждой из четырех ног 23 шагающего движителя 22, чем достигается горизонтальная установка корпуса 1 на грунте. При необходимости возможна установка корпуса 1 под определенным углом к опорной поверхности.
Возможность горизонтальной установки корпуса 1 шагающей опоры позволяет устанавливать на шагающую опору мощное погрузочное оборудование и дает ей возможность работать в условиях большого уклона местности.
Шагающая опора для транспортных средств повышенной проходимости предназначена для применения в транспортных средствах, работающих в сложных условиях, причем новая многофункциональная компоновочная схема с дополнительной системой преодоления локальных препятствий с принципиально новым рабочим циклом шагающих движителей в режиме преодоления препятствий и маневрировании, на базе совместной работы впервые разработанного механизма смены направления движения шагающей опоры и шагающих движителей различных типов: основных - циклового типа и дополнительных - ортогонального типа, что значительно повышает профильную проходимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| ШАГАЮЩАЯ ОПОРА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156712C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2171194C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2191131C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2003 |
|
RU2239577C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |

Изобретение относится к шагающим транспортным средствам повышенной проходимости. Шагающая опора содержит корпус с побортно установленными на нем шагающими движителями курсового движения. Шагающие движители курсового движения выполнены в виде плоских шарнирных четырехзвенников лямбдаобразного типа и содержат криволинейные опоры, которые снабжены лыжеобразными башмаками. Силовой привод курсового движения кинематически связан с шагающими движителями и содержит систему преодоления локальных препятствий, которая включает в себя передние шагающие движители курсового движения циклового типа и механизм смены направления движения шагающей опоры. Последний содержит поворотную платформу, установленную в горизонтальной плоскости под корпусом шагающей опоры и оборудованную поворотным реверсивным силовым приводом. Побортно установлены шагающие движители ортогонального типа, выполненные в виде попарно сгруппированных ног в виде гидроцилиндров с независимым гидроприводом. Концы сгруппированных ног с одной стороны соединены непосредственно с поворотной платформой, один жестко, второй шарнирно, а с другой стороны шарнирно связаны с проушинами общего для каждой пары ног дополнительного башмака лыжеобразной формы. Достигается возможность маневрирования и преодоления локальных препятствий с минимальными энергозатратами. 6 ил.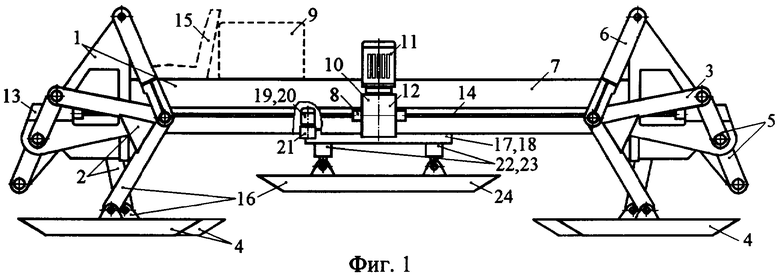
Шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с побортно установленными на нем шагающими движителями курсового движения, выполненными в виде плоских шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, содержащих криволинейные опоры, снабженные лыжеобразными башмаками, шарнирно связанные с кривошипами и с качающимися рычагами, свободные концы которых соединены с корпусом, а также силовой привод курсового движения, кинематически связанный с шагающими движителями, отличающаяся тем, что она содержит систему преодоления локальных препятствий, включающую в себя передние шагающие движители курсового движения циклового типа и механизм смены направления движения шагающей опоры, содержащий поворотную платформу, установленную в горизонтальной плоскости под корпусом шагающей опоры и оборудованную поворотным реверсивным силовым приводом, а также дополнительные побортно установленные шагающие движители ортогонального типа, выполненные, например, в виде попарно сгруппированных ног в виде гидроцилиндров с независимым гидроприводом, концы которых с одной стороны соединены непосредственно с поворотной платформой, один жестко, второй шарнирно, а с другой стороны шарнирно связаны с проушинами общего для каждой пары ног дополнительного башмака лыжеобразной формы.
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| Преобразователь двоичного кода в двоично-десятичный код угловых единиц | 1983 |
|
SU1124282A1 |
| JP 5245779 A, 24.09.1993 | |||
| US 4202423 A, 13.05.1980 | |||
| ШТАММ БАКТЕРИЙ BACILLUS MESENTERICIIS SP. RENNINUS № 61 | 0 |
|
SU185821A1 |
| RU 2001816 C1, 30.10.1993. | |||

