Изобретение относится к автоматизации технологических процессов и может быть использовано для переориентации, сортировки и разбраковки деталей из токопроводящего материала.
Известно устройство для ориентирования деталей электромагнитным полем, содержащее транспортирующий механизм, блок распознавания в виде индуктивных датчиков и электромагнитные исполнительные механизмы 1.
Недостатком известного устройства является низкая надежность при ориентировании деталей.
Наиболее близким к предлагаемому является устройство для управления ориентацией и сортировкой немагнитных токопроводящих деталей, содержащ.ее транспортирующий механизм, блок распознавания, блок сравнения, коммутатор сигналов и электромагнитные исполнительные механизмы 2.
Однако устройство не может различать мелкие, неявно выраженные признаки детали особенно на ее торцах, обладает низкой надежностью ориентации и работает только в режиме ориентации.
Цель изобретения - повыщение надежности и расщирение области применения за счет контроля размеров деталей.
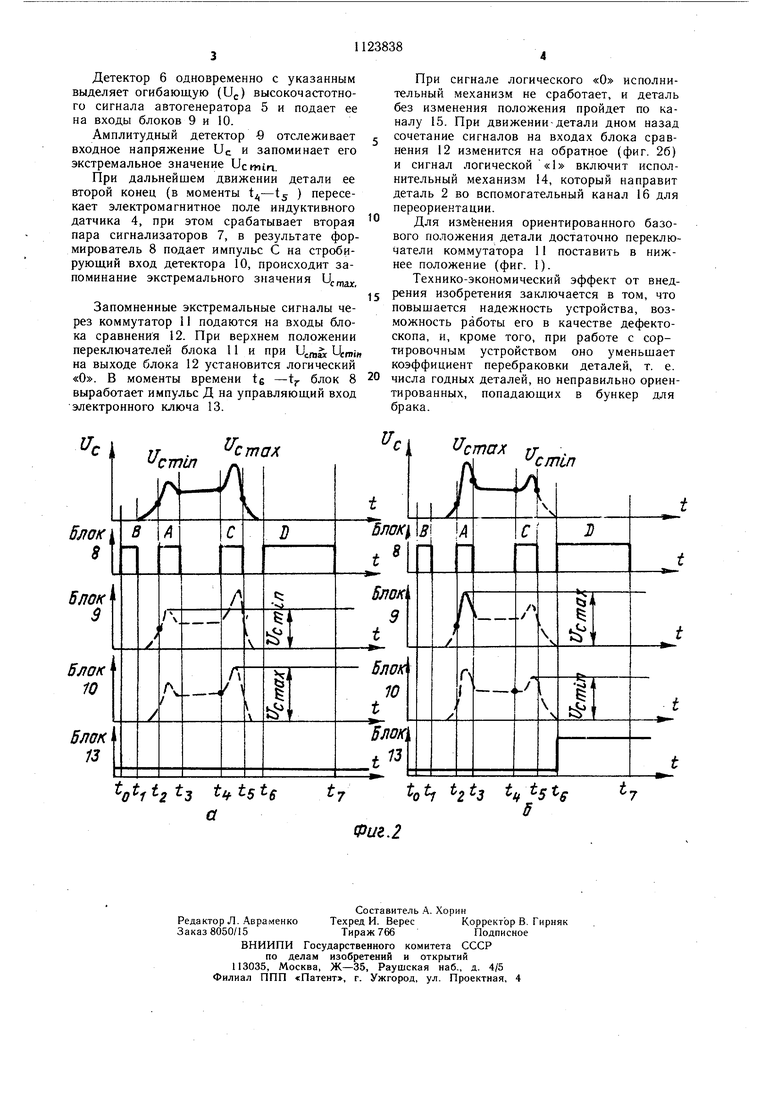
Указанная цель достигается тем, что в устройство для ориентации асимметричных токопроводящих деталей, содержащее механизм транспортировки деталей, узел определения положения деталей, коммутатор, выходы которого соединены с входами блока сравнения, и исполнительный механизм, введены фотодатчики, формирователь импульсов, два амплитудных пиковых детектора и ключ, причем выходы фотодатчиков соединены с входами формирователя импульсов, два выхода которого подключены к стробирующим входам амплитудных пиковых детекторов, третий выход подключен к входу «Сброс амплитудных пиковых детекторов, четвертый выход формирователя импульсов подключен к управляющему входу ключа, а выход узла определения положения деталей подключен к информационному входу амплитудных пиковых детекторов, выходы которых подключены к входам коммутатора, выход блока сравнения подключен к входу ключа, выход которого соединен с входом исполнительного механизма. Узел определения положения деталей состоит из последовательно соединенных индуктивного датчика, автогенератора и детектора. На фиг. 1 изображена структурная схема устройства; на фиг. 2 - графики сигналов на выходах блоков (а - при движении асимметричной детали типа колпачок дном вперед; б -то же, но дном назад). Устройство для распознавания и ориентации асимметричных, токопроводящих
деталей содержит транспортирующий механизм (лоток) 1 для перемещения подаваемых поштучно деталей 2 на узел 3 определения положения деталей, состоящий из индуктивного датчика 4 и последовательно включенных автогенератора 5 и детектора 6.
В начале и конце лотка установлены попарно фотодатчики 7, таким образом, что расстояния от каждого из крайних в паре сигнализаторов до индуктивного преобразователя равны между собой и превыщают длину детали, а расстояния каждого из средних сигнализаторов до этого преобразователя также равны, но меньще указанной 5 длины. Выходы всех фотодатчиков 7 подключены ко входам формирователя импульсов 8, имеющим четыре выхода А, В, С и Д.
Выход узла 3 подключен на параллельно соединенные входы двух амплитудных
0 пиковых детекторов 9 и 10, которые предназначены для запоминания экстремальных значений сигналов. Для управления работой детекторов 9 и 10, имеются стробирующие входы, связанные с выходами А и С
5 формирователя 8, и шина сброса, связанная с выходом В этого формирователя. Устройство блока амплитудного детектора известно в общетехнической литературе и предназначено для работы в двух режимах: выборки максимального сигнала,
0 его хранения.
Выходы детекторов 9 и 10 подключены к входам коммутатора сигналов 11, выходы которого подключены к соответствующим входам блока сравнения 12, выход которого через электронный ключ 13 связан с обмоткой электромагнита исполнительного механизма 14. Управляющий вход электронного ключа связан с выходом Д формирователя 8.
Лоток транспортирующего механизма
1 заканчивается двумя каналами 15 и 16, из которых один ;1вляется рабочим, а второй (вспомогательный) служит для деталей, требующих переориентации (поворота на 180° ). Исполнительный механизм 14 служит для управления входом детали 2 в канал 15 или . 16.
Устройство работает следующим образом. При движении детали 2 по лотку в нужном направлении (т. е. дном вперед) передний конец детали 2 перекрывают лучи пер0 вой пары фотодатчиков 7. В моменты времени to -tj при этом (фиг. 2а) формирователь 8 вырабатывает импульс В для сброса блоков 9 и 10 в начальное положение. При пересечении передним концом детали локального высокочастотного поля ин5 дуктивного датчика 4 (в момент времени ) формирователь 8 вырабатывает импульс А на стробирующий вход детектора 9.
Детектор 6 одновременно с указанным выделяет огибающую (U) высокочастотного сигнала автогенератора 5 и подает ее на входы блоков 9 и 10.
Амплитудный детектор в отслеживает входное напряжение Uc и запоминает его экстремальное значение Ucmin.
При дальнейшем движении детали ее второй конец (в моменты t,-t ) пересекает электромагнитное поле индуктивного датчика 4, при этом срабатывает вторая пара сигнализаторов 7, в результате формирователь 8 подает импульс С на стрс бирующий вход детектора 10, происходит запоминание экстремального значения 14.,
Запомненные экстремальные сигналы через коммутатор 11 подаются на входы блока сравнения 12. При верхнем положении переключателей блока 11 и при етн на выходе блока 12 установится логический «О. В моменты времени te -t блок 8 выработает импульс Д на управляющий вход электронного ключа 13.
При сигнале логического «О исполнительный механизм не сработает, и деталь без изменения положения пройдет по каналу 15. При движении-детали дном назад сочетание сигналов на входах блока сравнения 12 изменится на обратное (фиг. 26) и сигнал логической «1 включит исполнительный механизм 14, который направит деталь 2 во вспомогательный канал 16 для переориентации.
Для изменения ориентированного базового положения детали достаточно переключатели коммутатора 11 поставить в нижнее положение (фиг. 1).
Технико-экономический эффект от внедрения изобретения заключается в том, что повышается надежность устройства, возможность работы его в качестве дефектоскопа, и, кроме того, при работе с сортировочным устройством оно уменьшает коэффициент перебраковки деталей, т. е. числа годных деталей, но неправильно ориентированных, попадающих в бункер для брака.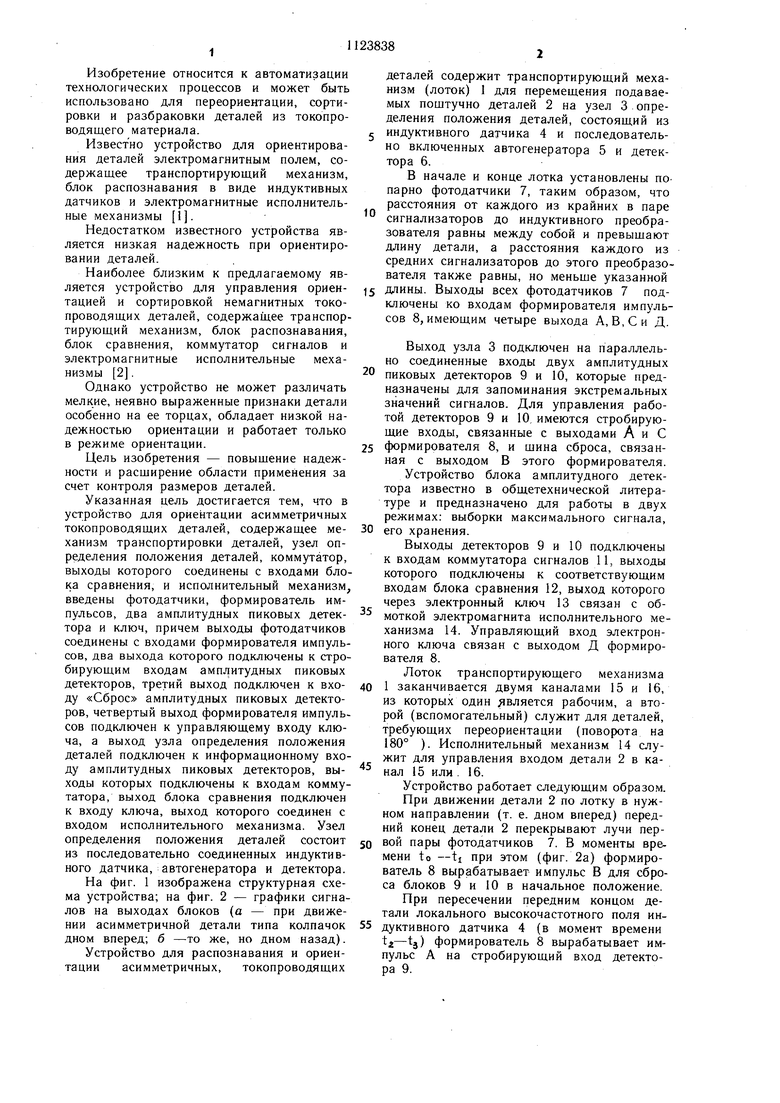
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и сортировки деталей | 1987 |
|
SU1442274A1 |
| Устройство управления процессом разбраковки и ориентации деталей | 1988 |
|
SU1639784A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1130829A1 |
| Устройство автоматической регулировки размаха видеосигнала | 1988 |
|
SU1548867A1 |
| Автомат для контроля и сортировки деталей и устройство управления автоматом для контроля и сортировки деталей | 1983 |
|
SU1135500A1 |
| Устройство для ранней диагностики образования и развития микротрещин в деталях машин и конструкциях | 2022 |
|
RU2788311C1 |
| Система управления | 1981 |
|
SU996995A1 |
| УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2066646C1 |
| Устройство для контроля длины электропроводных изделий | 1981 |
|
SU989316A1 |
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
1. УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АСИММЕТРИЧНЫХ ТОКОПРОВОДЯЩИХ ДЕТАЛЕЙ, содержащее механизм транспортировки деталей, узел определения положения деталей, коммутатор, выходы которого соединены с входами блока сравнения, и исполнительный механизм, отличающееся тем, что, с целью повышения надежности и расширения области применения за счет контроля размеров деталей, оно содержит фотодатчики, формирователь импульсов, два амплитудных пиковых детектора и ключ, причем выходы фотодатчиков соединены с входами формирователя импульсов, два выхода которого подключены к стробируюшим входам амплитудных пиковых детекторов, третий выход подключен к входу «Сброс амплитудных пиковых детекторов, четвертый выход формирователя импульсов подключен к управляюшему входу ключа, а выход узла определения положения деталей подключен к информационному входу амплитудных пиковых детекторов, выходы которых подключены к входам коммутатора, выход бло ка сравнения подключен к входу ключа, (Л выход которого соединен с входом исполнительного механизма. 2. Устройство по п. 1, отличающееся тем, что узел определения положения деталей состоит из последовательно соединенных индуктивного датчика, автогенератора и детектора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Иоффе Б | |||
| А., Калнинь Р | |||
| К | |||
| Ориентирование деталей электромагнитным полем, Рига, «Зинатне, 1972, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления ориентацией и сортировкой немагнитных токопроводящих деталей | 1977 |
|
SU639684A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
