со
о
00 ISO
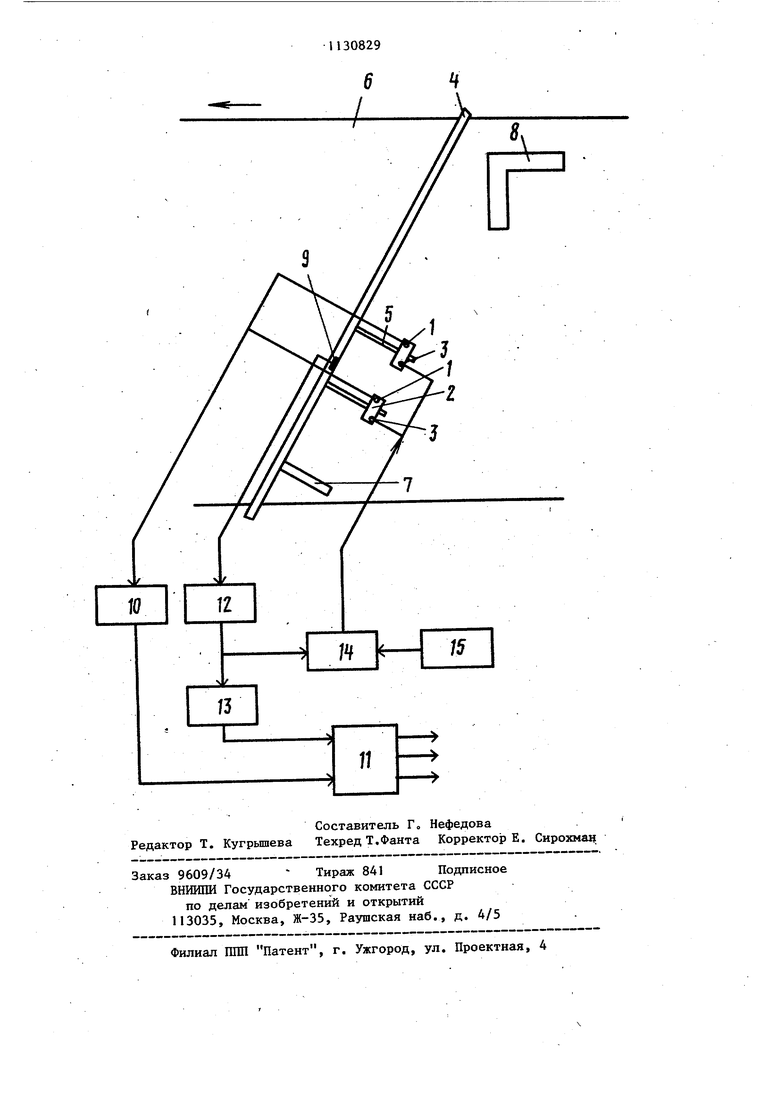
QD 1 Изобретение относится к области робототехники и может быть использовано при создании адаптивных роботов обслуживающих технологические конвейеры. Известно устройство, содержащее телекамеры, вычислительный блок, бло управления и приводы робота, являетс сложным П , Наиболее близким техническим реше нием к изобретению является устройство, содержащее фотодатчики и источ ники излучения, а также пульт управления, блок памяти, логический блок, коммутаторы, счетчик, пороговый элемент, генератор тактовых импульсов и нуль-орган Недостатком известного устройства является его сложность, обусловленная наличием больщого числа вычислительных элементов. Целью изобретения является упрощение устройства. Цель достигается тем, что устройс во содержит ключ, источник питания, блок формирователей импульсов, последовательно соединенные датчик наличия детали, формироват1ЕЛь импульса элемент задержки и дешифратор, а так же направляющий стопор с упором и кронштейнами, на которых установлены датчик наличия детали, источники излучения и фотодатчики, выходы которы соединены с входами блока формирователей импульсов, подключенного выходами к вторым входам дешифратора, вы ходы которого соединены с выходами устройства, выход формирователя импульса подключен к первому входу клю ча, соединенного вторым входом с выходом источника питания, а выходом с входом источников излучения. На чертеже представлена функциона ная схема устройства. Устройство содержит фотодатчики 1 корпус 2, источники 3 излучения, направляющий - стопор 4, кронштейн 5, конвейер 6, упор 7, деталь 8, датчик 9 наличия детали, блок JO формирователей импульсов, дешифратор 11, формирователь 12 импульса, элемент 13 9 задержки, ключ 14, источник 15 питания. Устройство работает следующим образом. Деталь 8, перемещаемая лентой конвейера 6, доходит до направляющего стопора 4 и под действием сил трения начинает разворачиваться. Одновременно с этим деталь 8 скользит вдоль стопора 4, занимая одно из возможных устойчивых положений. При подходе детали. 8 к датчику 9, например индуктивному, последний срабатьюает. Сигнал с датчика 9 подается на вход формирователя 12 импульса, С выхода формирователя 12 импульса .сигнал поступает на вход элемента I3 задержки и ключа I4. Ключ 14 подключает источник 15 питания к источникам 3 излучения, которые . включаются. Срабатьгоают фотодатчики 1, Сигналы с фотодатчиков 1 подаются на блок О формирователей импульсов. Выходы блока 10 подключены к входам дешифратора 11. К входу разрешения считывания дешифратора 11 подключен выход элемента 13 задержки. Величина задержки выбирается больше времени переключения ключа 14 и срабатьшания фотодатчиков 1 и источников Зизлучения. Код фотрдатчиков 1 .дешифрируется дешифратором- 11 и на одном из выходов i . дешифратора II, соответствующем номеру положения детали 8, появляется единица, за счет чего включается соответствующая программа работы робота. На позиции захвата деталь 8 останавливается с помощью упора 7. На время ориентации детали 8 влияют угол наклона стопора 4, коэффициент трения детали 8 о ленту конвейера 6 и стопор 4. По результатам экспериментов можно рекомендовать угол наклона стопора 4 40 - 60 к направлению движения- ленты конвейера 6. Время ориентации уменьшается с увеличением коэффициента трения детали 8 о ленту конвейера 6 и уменьше-. нием коэ4фициента трения детали 8 о стопор 4. Применение изобретения позволит упростить устройство для управления адаптивйым роботом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботом технологического конвейера | 1984 |
|
SU1251023A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1140093A1 |
| Устройство для управления роботом технологического конвейера | 1987 |
|
SU1526985A1 |
| Устройство для автоматической ориентации деталей | 1982 |
|
SU1147549A1 |
| Устройство для контроля отклонения геометрических параметров деталей | 1983 |
|
SU1138645A1 |
| Устройство для управления роботом технологического конвейера | 1980 |
|
SU1096609A1 |
| Устройство для управления сортировкой деталей по типоразмеру | 1985 |
|
SU1271589A2 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| Устройство для счета деталей | 1986 |
|
SU1410077A1 |
| Устройство для управления сборочным роботом | 1984 |
|
SU1236418A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ, содержащее фотог датчики и источники излучения, отличающееся тем, что, с целью упрощения устройства, оно содержит ключ, источник питания, блок формирователей импульсов, последовательно соединенные датчик наличия детали, формирователь импульса, элемент задержки и дешифратор, а также направляющий стопор с упором и кронштейнами, на которьк установлены датчик наличия детали, источники излучения и фотодатчики, выходы которых соединены с входами блока формирователей импульсов, подключенного выходами к вторым входам дещифратора, выходы которого соединены с выходами устройства, выход формирователя импульса подключен к первому входу ключа, соединениого вторым входом с О) выходом источника питания, а выходом - с входом источников излучения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Катыс Г | |||
| П., Оптические информациоиные системы роботов-манипуляторов | |||
| М., Машиностроение, 1977, , Ъ | |||
| Насос | 1917 |
|
SU13A1 |
| Авторское свидетельство СССР по заявке JP 2868277/18-24, jbi | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
