сл
fSfSKS
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля и сортировки деталей и устройство управления автоматом для контроля и сортировки деталей | 1983 |
|
SU1135500A1 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| Способ ориентации асимметричных деталей и устройство для его осуществления | 1986 |
|
SU1373518A1 |
| Система для управления робототехнологическим комплексом | 1987 |
|
SU1413599A1 |
| Автомат для контроля и разбраковки деталей | 1987 |
|
SU1470363A1 |
| Устройство для контроля и транспортировки деталей | 1986 |
|
SU1416968A1 |
| Устройство для контроля и сортировки деталей | 1984 |
|
SU1224020A1 |
| Устройство для сортировки плоских деталей | 1986 |
|
SU1407595A1 |
| Устройство для определения этапов прокатки | 1988 |
|
SU1533796A2 |
| Радиозотопный уровнемер | 1986 |
|
SU1384957A1 |
Изобретение о сносится к машиностроению, электротехнической промышленности и приборостроению и может быть использовано в дефектоскопии, в частности, для мно- гопараметрового контроля асимметричных плоских деталей и позволяет повысить надежность контроля асимметричных деталей. Устройство содержит подающий V-образный лоток, на котором размещены два вихретоковых датчика, оптический датчик, комбинированную систему управления опознаванием, контроля и ориентации деталей, в состав которой входят формирователи сигналов датчиков, два одновибратора, две счетные декады, блок памяти из пяти триггеров, пятивходовую схему совпадения, схему задержки, один инвертор, двухвходо- вые схемы совпадения, логическую схему управления тремя испольнительны,.ч, механизмами, бункер для брака. 6 ил.
Изобретение относится к машиностроению, электротехнической промышленности, приборостроению и может быть использовано для контроля, разбраковки и ориентации асимметричных плоских деталей
Цель изобретения - повышение надежности контроля асимметричных деталей.
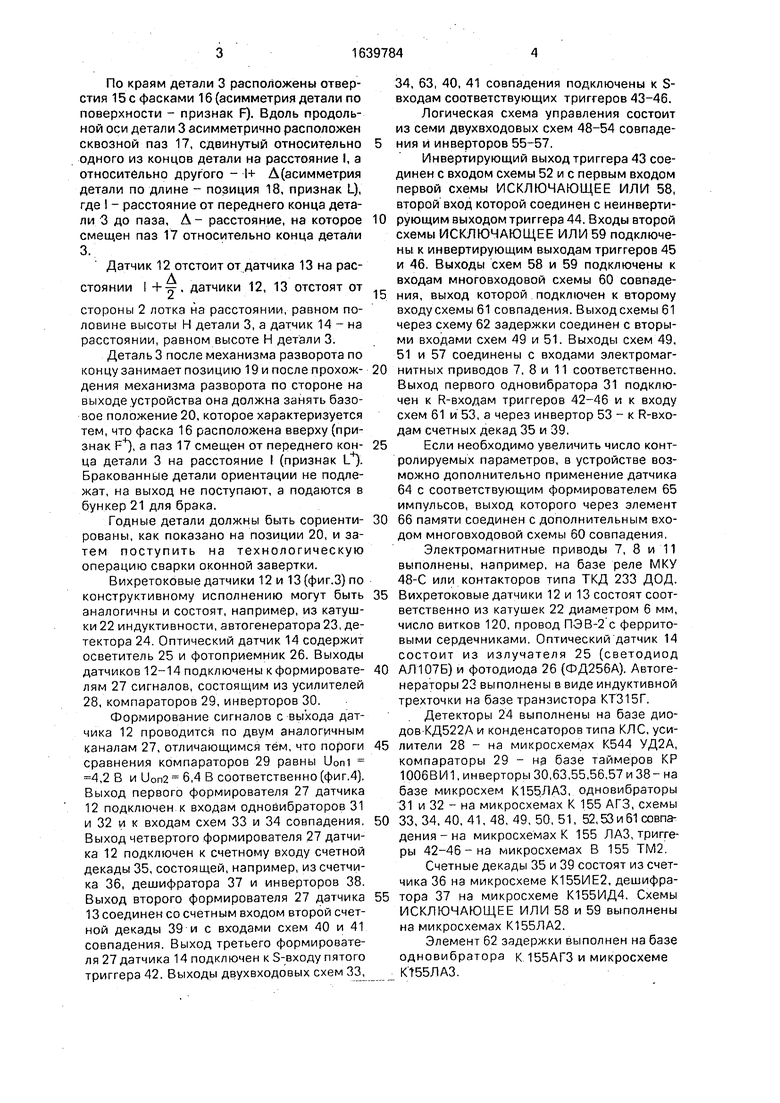
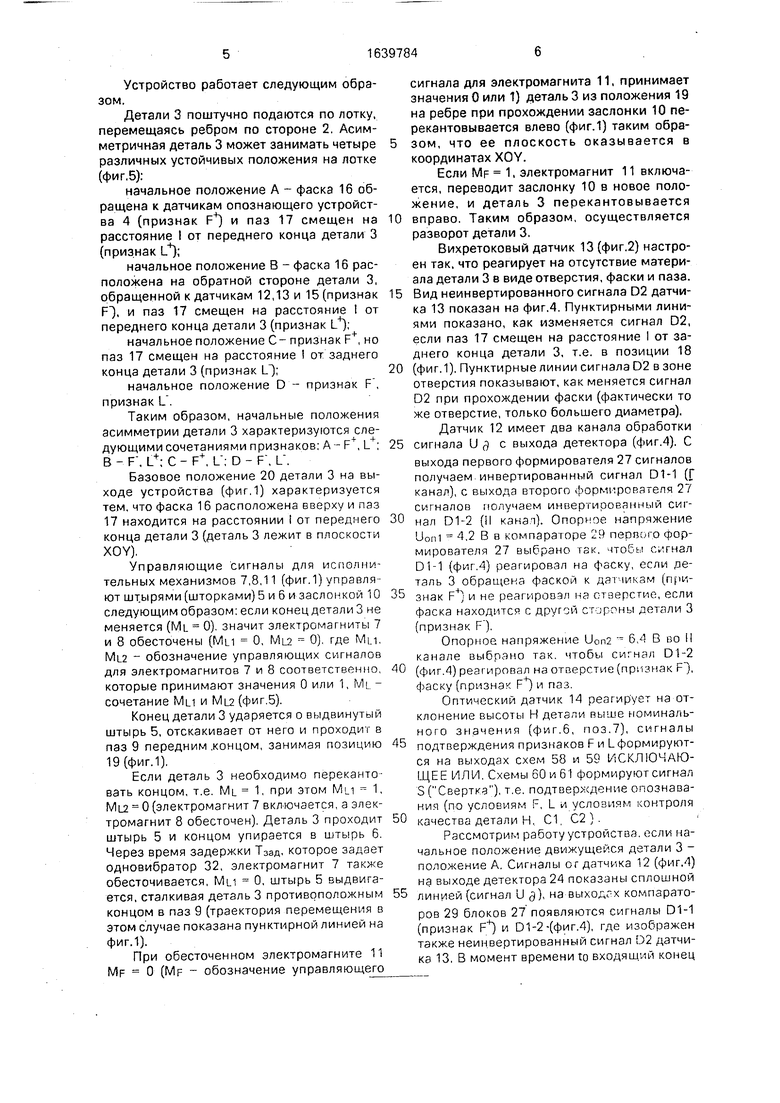
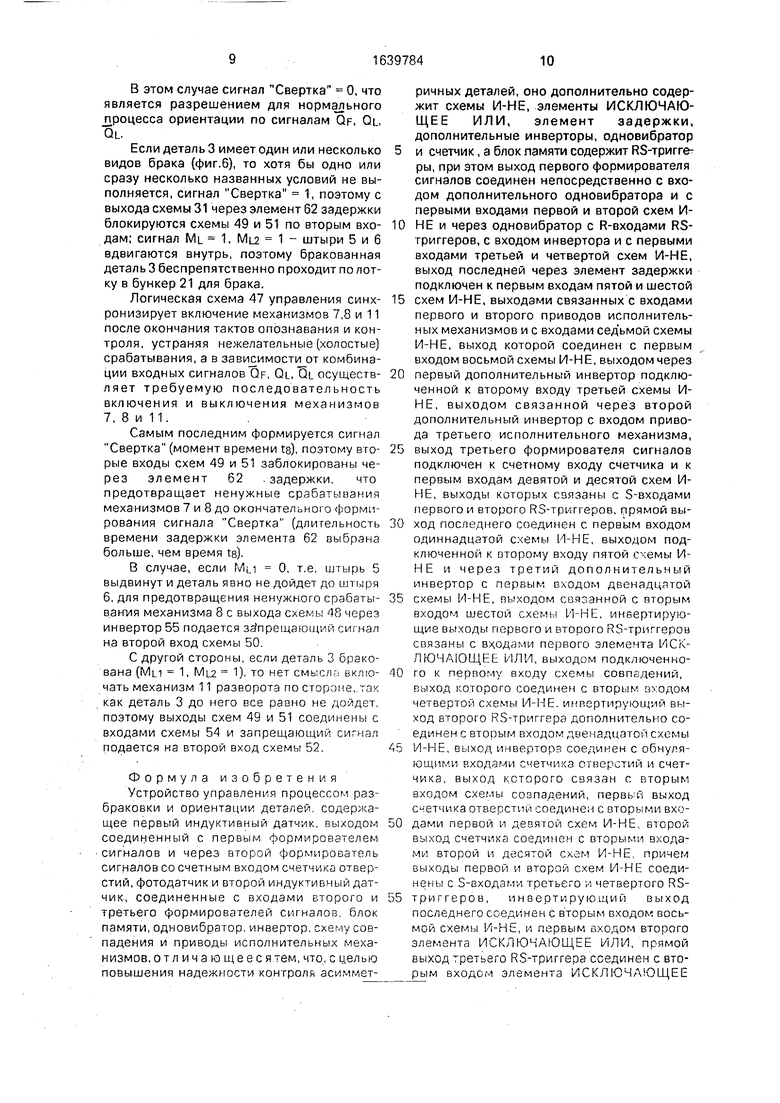
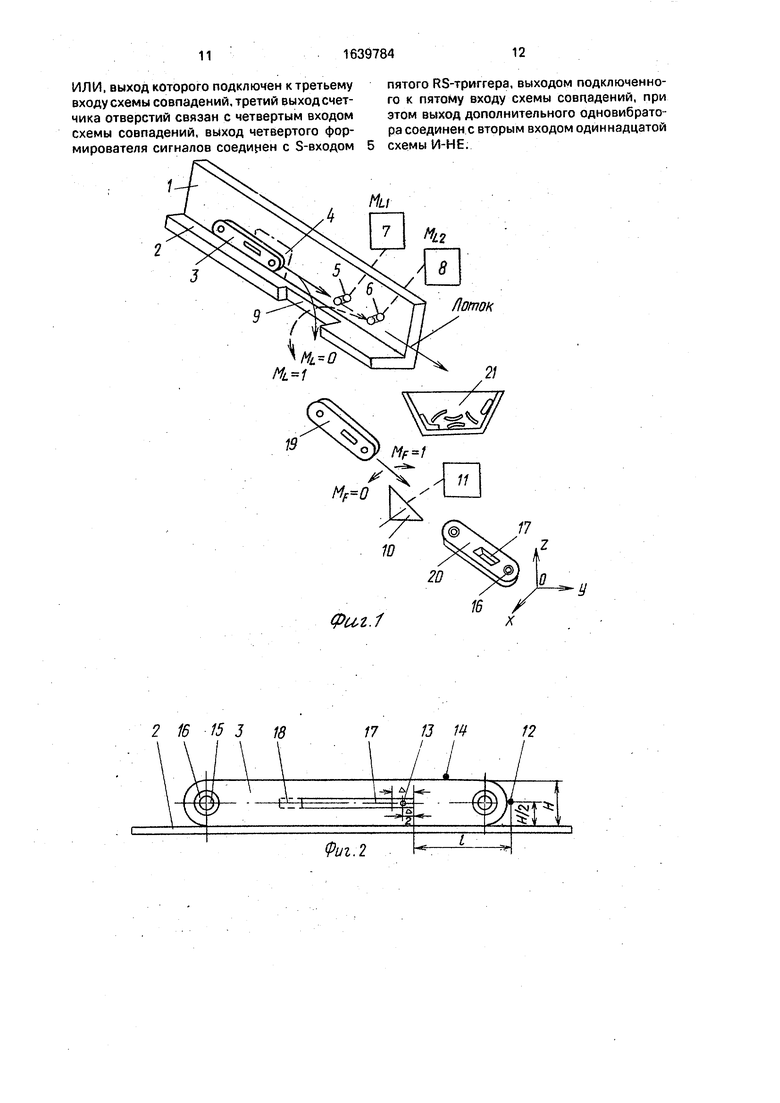
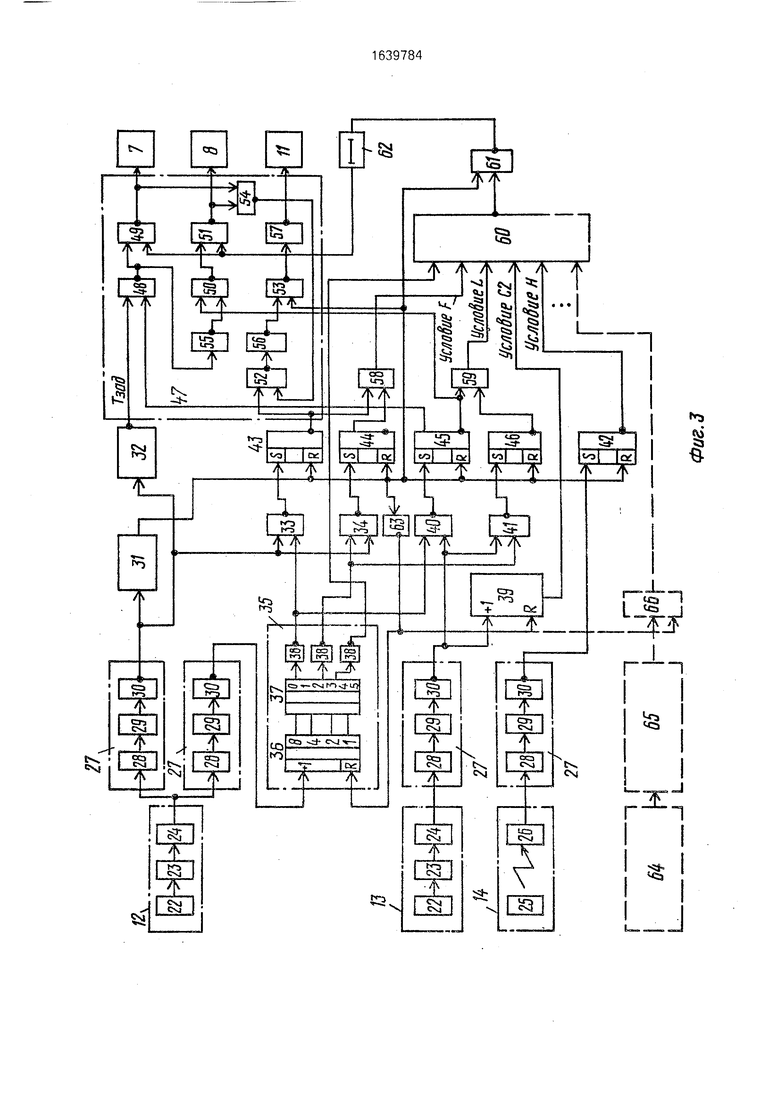
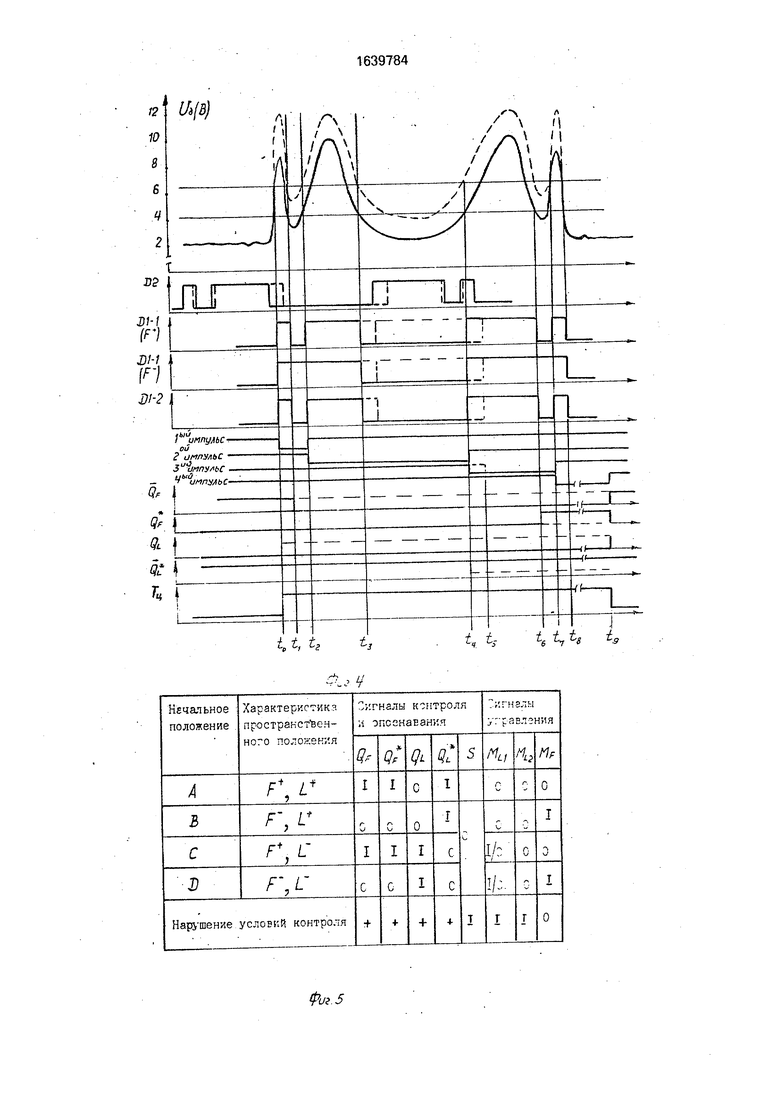
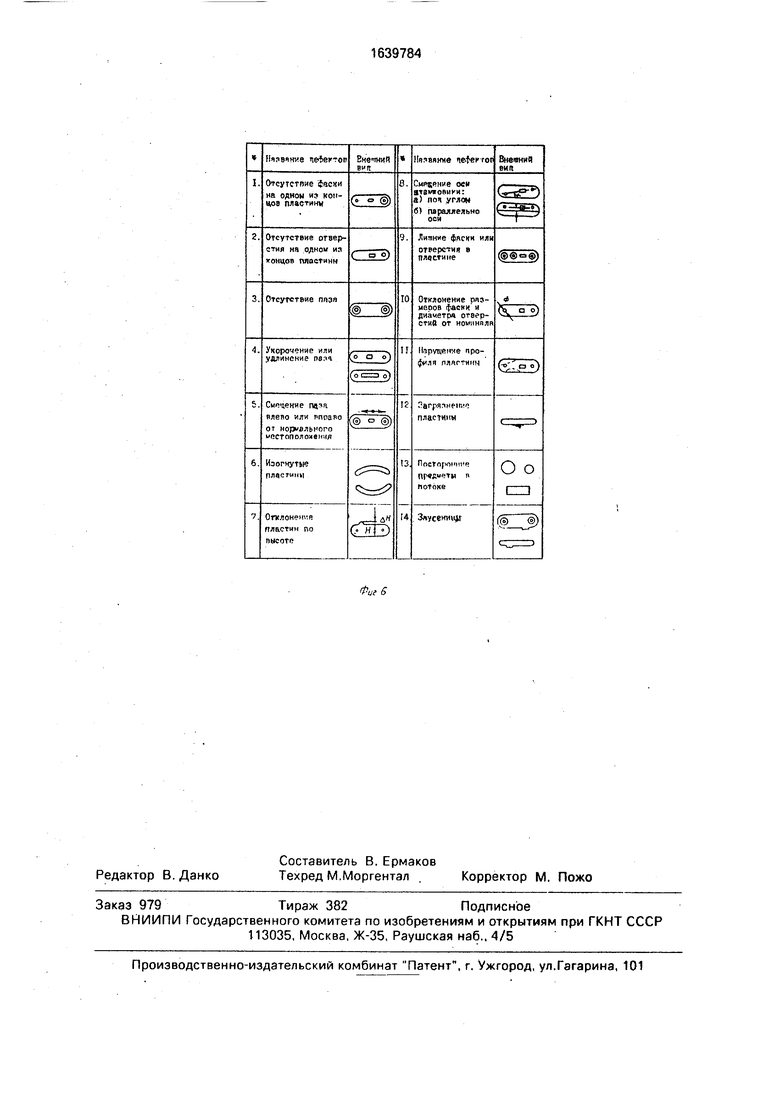
На фиг.1 дана функциональная схема устройства с подающим лотком и элементами системы управления контролем и разбраковкой асимметричных деталей; на фиг.2 - асимметричная деталь и размещение опознающих датчиков на лотке; на фиг.З - структурная схема системы управления контролем и разблокировкой деталей; на фиг.4 - циклограммы работы устройства; на фиг,5 - таблица комбинаций контрольных и управляющих сигналов при различных начальных положениях асимметричной
пластины (детали); на фиг.6 - таблгм дефектов, выявляемых устройством контроля и ориентации.
Устройство (фиг.1) состоит из подающего V-образного лотка по сторонам 1 и 2, На стороне 1 лотка размещено опознавающее устройство 4, По стороне 2 лотка на ребре перемещаются асимметрично детали 3. Механизм разворота по кониу выполнен, например, в виде двух задвигающихся штырей (шторок) 5 и 6 с электромагнитными приводами 7 и 8 соответственно.
Для пролета детали 3 имеется в лотке паз 9, Механизм разворота по стоооне содержит, например, заслонку 10 с электромагнитным приводом 11. Опознавающее устройство 4 содержит два вихретоковых датчика 12, 13 и оптический датчик 14 (фиг.2).
ы
По краям детали 3 расположены отверстия 15с фасками 16 (асимметрия детали по поверхности - признак F). Вдоль продольной оси детали 3 асимметрично расположен сквозной паз 17, сдвинутый относительно одного из концов детали на расстояние I, a относительно другого - 1+ А(асимметрия детали по длине - позиция 18, признак L), где I - расстояние от переднего конца детали 3 до паза, А - расстояние, на которое смещен паз 17 относительно конца детали 3.
Датчик 12 отстоит от датчика 13 на расстоянии I +-K-. датчики 12, 13 отстоят от
стороны 2 лотка на расстоянии, равном половине высоты Н детали 3, а датчик 14 - на расстоянии, равном высоте Н детали 3.
Деталь 3 после механизма разворота по концу занимает позицию 19 и после прохождения механизма разворота по стороне на выходе устройства она должна занять базовое положение 20, которое характеризуется тем, что фаска 16 расположена вверху (признак F4), а паз 17 смещен от переднего конца детали 3 на расстояние I (признак L4). Бракованные детали ориентации не подлежат, на выход не поступают, а подаются в бункер 21 для брака.
Годные детали должны быть сориентированы, как показано на позиции 20, и затем поступить на технологическую операцию сварки оконной завертки.
Вихретоковые датчики 12 и 13 (фиг.З) по конструктивному исполнению могут быть аналогичны и состоят, например, из катушки 22 индуктивности, автогенератора 23, детектора 24. Оптический датчик 14 содержит осветитель 25 и фотоприемник 26. Выходы датчиков 12-14 подключены к формирователям 27 сигналов, состоящим из усилителей 28, компараторов 29, инверторов 30.
Формирование сигналов с выхода датчика 12 проводится по двум аналогичным каналам 27, отличающимся тем, что пороги сравнения компараторов 29 равны Uoni 4,2 В и Uon2 6,4 В соответственно (фиг.4). Выход первого формирователя 27 датчика
12подключен к входам одновибраторов 31 и 32 и к входам схем 33 и 34 совпадения. Выход четвертого формирователя 27 датчика 12 подключен к счетному входу счетной декады 35, состоящей, например, из счетчика 36, дешифратора 37 и инверторов 38. Выход второго формирователя 27 датчика
13соединен со счетным входом второй счетной декады 39 и с входами схем 40 и 41 совпадения. Выход третьего формирователя 27 датчика 14 подключен к S-входу пятого триггера 42. Выходы двухвходовых схем 33,
34, 63, 40, 41 совпадения подключены к S- входам соответствующих триггеров 43-46. Логическая схема управления состоит из семи двухвходовых схем 48-54 совпадения и инверторов 55-57.
Инвертирующий выход триггера 43 соединен с входом схемы 52 и с первым входом первой схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 58, второй вход которой соединен с неинверти0 рующим выходом триггера 44. Входы второй схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 59 подключены к инвертирующим выходам триггеров 45 и 46. Выходы схем 58 и 59 подключены к входам многовходовой схемы 60 совпаде5 ния, выход которой подключен к второму входу схемы 61 совпадения. Выход схемы 61 через схему 62 задержки соединен с вторыми входами схем 49 и 51. Выходы схем 49, 51 и 57 соединены с входами электромаг0 нитных приводов 7, 8 и 11 соответственно. Выход первого одновибратора 31 подключен к R-входам триггеров 42-46 и к входу схем 61 и 53, а через инвертор 53 - к R-входам счетных декад 35 и 39.
5Если необходимо увеличить число контролируемых параметров, в устройстве возможно дополнительно применение датчика 64 с соответствующим формирователем 65 импульсов, выход которого через элемент
0 66 памяти соединен с дополнительным входом многовходовой схемы 60 совпадения,
Электромагнитные приводы 7, 8 и 11 выполнены, например, на базе реле МКУ 48-С или контакторов типа ТКД 233 ДОД.
5 Вихретоковые датчики 12 и 13 состоят соответственно из катушек 22 диаметром 6 мм, число витков 120, провод ПЭВ-2 с феррито- выми сердечниками. Оптический датчик 14 состоит из излучателя 25 (светодиод
0 АЛ107Б) и фотодиода 26 (ФД256А). Автогенераторы 23 выполнены в виде индуктивной трехточки на базе транзистора КТ315Г.
Детекторы 24 выполнены на базе диодов КД522А и конденсаторов типа КЛС, уси5 лители 28 - на микросхемах К544 УД2А, компараторы 29 - на базе таймеров КР 1006ВИ1, инверторы 30,63,55,56,57 и 38- на базе микросхем К155ЛАЗ, одновибраторы 31 и 32 - на микросхемах К 155 АГЗ, схемы
0 33, 34, 40, 41, 48, 49, 50, 51, 52,53 и 61 совпадения - на микросхемах К 155 ЛАЗ, триггеры 42-46 - на микросхемах В 155 ТМ2.
Счетные декады 35 и 39 состоят из счетчика 36 на микросхеме К155ИЕ2, дешифра5 тора 37 на микросхеме К155ИД4. Схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 58 и 59 выполнены на микросхемах К155ЛА2.
Элемент 62 задержки выполнен на базе одновибратора к 155АГЗ и микросхеме К-Г55ЛАЗ.
Устройство работает следующим образом.
Детали 3 поштучно подаются по лотку, перемещаясь ребром по стороне 2. Асимметричная деталь 3 может занимать четыре различных устойчивых положения на лотке (фиг.5):
начальное положение А - фаска 16 обращена к датчикам опознающего устройства 4 (признак F4) и паз 17 смещен на расстояние I от переднего конца детали 3 (признак L4);
начальное положение В - фаска 16 расположена на обратной стороне детали 3, обращенной к датчикам 12,13 и 15 (признак F), и паз 17 смещен на расстояние I от переднего конца детали 3 (признак L4);
начальное положение С- признак F+, но паз 17 смещен на расстояние от заднего конца детали 3 (признак |);
начальное положение D - признак F, признак L.
Таким образом, начальные положения асимметрии детали 3 характеризуются следующими сочетаниями признаков; А - F+, L+; В - F. L+; С - F+, D - F , L.
Базовое положение 20 детали 3 на выходе устройства (фиг.1) характеризуется тем, что фаска 16 расположена вверху и паз 17 находится на расстоянии I от переднего конца детали 3 (деталь 3 лежит в плоскости XOY).
Управляющие сигналы для исполнительных механизмов 7,8,11 (фиг.1) управля ют штырями (шторками) 5 и 6 и заслонкой 10 следующим образом: если конец детали 3 не меняется (ML 0). значит электромагниты 7 и 8 обесточены (Ми О, 0) где Ми, обозначение управляющих сигналов для электромагнитов 7 и 8 соответственно, которые принимают значения 0 или 1, MI - сочетание Ми и Миг (фиг.5).
Конец детали 3 ударяется о выдвинутый штырь 5, отскакивает от него и проходит в паз 9 передним .концом, занимая позицию 19 (фиг.1).
Если деталь 3 необходимо перекантовать концом, т.е. ML 1, при этом Ми - 1, Ми 0 (электромагнит 7 включается, а электромагнит 8 обесточен). Деталь 3 проходит штырь 5 и концом упирается в штырь 6. Через время задержки Т3ад, которое задает одновибратор 32, электромагнит 7 также обесточивается, Ми 0, штырь 5 выдвигается, сталкивая деталь 3 противоположным концом в паз 9 (траектория перемещения в этом случае показана пунктирной линией на фиг.1).
При обесточенном электромагните 11 Мр 0 (Мр - обозначение управляющего
сигнала для электромагнита 11, принимает значения 0 или 1) деталь 3 из положения 19 на ребре при прохождении заслонки 10 перекантовывается влево (фиг.1) таким обра- зом, что ее плоскость оказывается в координатах XOY.
Если Мр 1, электромагнит 11 включается, переводит заслонку 10 в новое положение, и деталь 3 перекантовывается
вправо. Таким образом, осуществляется разворот детали 3,
Вихретоковый датчик 13 (фиг.2) настроен так, что реагирует на отсутствие материала детали 3 в виде отверстия, фаски и паза.
Вид неинвертированного сигнала D2 датчика 13 показан на фиг.4. Пунктирными линиями показано, как изменяется сигнал D2, если паз 17 смещен на расстояние I от заднего конца детали 3, т.е. в позиции 18
(фиг.1). Пунктирные линии сигнала D2 в зоне
отверстия показывают, как меняется сигнал
D2 при прохождении фаски (фактически то
же отверстие, только большего диаметра).
Датчик 12 имеет два канала обработки
сигнала U $ с выхода детектора (фиг.4). С выхода первого формирователя 27 сигналов получаем инвертированный сигнал D1-1 (Г канал), с выхода второго формирователя 27 сигналов получаем инвертированный сигнал D1-2 (М капай). Опорное напряжение Uoni 4,2 В в компараторе 29 первого формирователя 27 выбрано гак, чтобы с/гнал D1-1 (фиг.4) реагировал на фаску, если деталь 3 обращена фаской к дат ткзм (признак F+) и не реагировал на отверстие, если фаска находится с другой сирены летали 3 (признак F).
Опорное напряжение U0n2 6,4 В во II канале выбрано так. чтобы сигнал D1-2
(фиг.4) peat провал на отверстие (признак F), фаску (признак F4) и паз
Оптический датчик 14 реагирует на отклонение высоты Н детали выше номинального значения (фиг.6, поз.7), сигналы
подтверждения признаков F и L формируются на выходах схем 58 и 59 ИСКЛЮЧАЮЩЕЕ ИЛИ. Схемы 60 и 61 формируют сигнал S (Свертка), т.е. подтверждение опознавания (по условиям F, L и условиям контроля
качества детали И, С1 С2 }
Рассмотрим работу устройства, если начальное положение движущейся детали 3 - положение А. Сигналы отдатчика 12 (фиг,4) на выходе детектора 24 показаны сплошной
линией (сигнал U $), на выходгх компараторов 29 блоков 27 появляются сигналы D1-1 (признак F4) и 01-2-(фиг.4), где изображен также неинвертированный сигнал D2 датчика 13, В момент времени to входящий конец
детали 3 взаимодействует с индуктивным датчиком 12, происходит запуск одновибра- тора 31 (32) и записывается единица в первую счетную декаду 35 (первый импульс). В момент времени ti триггер 43 по S-входу перебрасывается в единичное состояние (значит QF 0).
В момент времени t4 триггер 46 по S- входу.перебрасывается в единичное состояние (QL 0), т.е. в этот момент в счетную декаду 35 записывается третий счетный импульс от сигнала D1-2. В момент времени t6 триггер 44 по 5-входу перебрасывается в единичное состояние (Qp 1).
После момента времени te, когда выхо- дящий конец детали пройдет датчик 12, состояние блоков и элементов системы управления характеризуется следующими сигналами: QF 1, QF 0; 1. 0; . Qi , 0.
Условие C1 1 - в момент времени t в счетную декаду 35 записан четвертый счетный импульс. Условие F 1. Условие L 1. Условие С2 1 счетную декаду 39 от фронтов сигнала D2 записано к моменту времени ts четыре счетных импульса. Условие Н 1 - деталь не имеет превышения по высоте от номинального размера.
При выполнении условий на входах многовходовой схемы 60 на ее выходе сиг- нал Свертка 0, который на выходе схемы 31 через элемент 62 поступает на вторые входы схем 49 и 51, разрешая процесс ориентации.
При поступлении указанных сигналов на входы шестивходовой логической схемы управления она вырабатывает управляющие сигналы MLI 0 (штырь 5 выдвинут), ML2 0 (штырь 6 выдвинут), MF 0. В результате деталь 3, не меняя своего конца, пода- ется в паз 9 и из положения 10 заслонкой 10 поворачивается фаской вверх, т.е. занимает требуемое базовое положение.
На фиг. 5 приведены состояния сигналов опознавания начального положения детали 3 и управляющих сигналов на исполнительные механизмы, которые переориентируют деталь 3 на выходе в требуемое базовое положение.
Если начальное положене детали 3положение В (сочетание признаков F .L4), то в момент времени ti тр иггер 43 не изменяет своего состояния (т.е. QF 1 до конца цикла ориентации), в момент времени т.4триггер 46 перебрасывается в единичное состояние (Qi 0); в момент времени te триггер 44 не изменяет своего состояния до конца цикла (Ор 0). После процесса опознавания и контроля в момент времени te значение сиг- налов в системе: QF О, QF 1; QF О, Qr
1; QL О, QL 1, QL 1, QL О, Свертка 0.
Данные сигналы управляют исполнительными механизмами 7,8 и 11 следующим образом. Сигналы MLI 0 (штырь 5 выдвинут), ML2 0 (штырь 6 выдвинут), поэтому деталь 3 не меняет своего конца. Сигнал Мр 1, поэтому деталь 3 из положения 19 перекантовывается вправо, опять занимая требуемое положение фаской вверх.
Если начальное положение движущейся детали 3 - положение С (сочетание признаков F , L), то сигнал от фаски записывается в триггер 43 в момент времени t(Qp 0), и подтверждается в момент времени t6 от задней фаски в триггере 44 (QF 1). Так как паз расположен не спереди, то триггер 46 в момент времени t4 не изменяет своего состояния (QL 1), а триггер 45 в момент времени ti перебрасывается в единичное состояние, QL 1.
Так как QL 1, то сигнал MLI 1 (механизм 7 срабатывает и штырь 5 задвигается), а Миг - 0 (штырь 6 выдвинут). Деталь 3 проходит штырь 5 и упрется концом в штырь 6. Через время Тзад (которое задается одно- вибратором 32) MLI 0, механизм 7 обесточивается, штырь 5 выдвигается и деталь 3 сталкивается обратным концом в паз 9. Деталь 3 изменяет свой конец на позиции 19 (траектория перекантовки обозначена пунктирной линией на фиг.1) и далее поворачивается фаской вверх (влево), так как Мр О,
Аналогично, если начальное положение детали 3 - положение D (сочетание признаков F .L), QL 1, QF O, Mp 1, Мц 0. Через время Тзад деталь 3 меняет свой конец и перекантовывается вправо (Мр 1) фаской вверх.
Независимо от начального положения детали 3 на лотке все пять условий должны быть выполнены при опознавании и контроле:
Условие F 1 - фаска опознается на входном конце, а подтверждается ее наличие по выходному концу.
Условие L 1 - если паз впереди, то его не должно быть сзади, и наоборот, если паз сзади, то его не должно быть впереди.
Условие Н 1 - высота детали не должна превышать номинального значения.
Условие С1 1 - в счетную декаду 35 должны быть записаны от сигнала D1-2 ровно четыре счетных импульса, не больше и не меньше.
Условие С2 1 - в счетную декаду 39 должны быть записаны от сигналаТ52 ровно четыре счетных импульса, не больше и не меньше.
В этом случае сигнал Свертка 0, что является разрешением для нормального процесса ориентации по сигналам QF, QL, QL.
Если деталь 3 имеет один или несколько видов брака (фиг.6), то хотя бы одно или сразу несколько названных условий не выполняется, сигнал Свертка 1, поэтому с выхода схемы 31 через элемент 62 задержки блокируются схемы 49 и 51 по вторым входам; сигнал ML 1, 1 - штыри 5 и 6 вдвигаются внутрь, поэтому бракованная деталь 3 беспрепятственно проходит по лотку в бункер 21 для брака.
Логическая схема 47 управления синхронизирует включение механизмов 7,8 и 11 после окончания тактов опознавания и контроля, устраняя нежелательные (холостые) срабатывания, а в зависимости от комбинации входных сигналов Qp, QL, QL осуществляет требуемую последовательность включения и выключения механизмов 7, 8 и 11.
Самым последним формируется сигнал Свертка (момент времени ts), поэтому вторые входы схем 49 и 51 заблокированы через элемент 62 задержки, что предотвращает ненужные срабатывания механизмов 7 и 8 до окончательного формирования сигнала Свертка (длительность времени задержки элемента 62 выбрана больше, чем время te).
В случае, если Ми 0, т.е. штырь 5 выдвинут и деталь явно не дойдет до штыря 6, для предотвращения ненужного срабатывания механизма 8 с выхода схемы 48 через инвертор 55 подается запрещающий CHI нал на второй вход схемы 50.
С другой стороны, если деталь 3 бракована (Ми 1, MLZ 1). то нет смысле, включать механизм 11 разворота по стороне, так как деталь 3 до него все равно не дойдет. поэтому выходы схем 49 и 51 соединены с входами схемы 54 и запрещающий сигнал подается на второй вход схемы 52.
Формула изобретения Устройство управления процессом разбраковки и ориентации деталей содержащее первый индуктивный датчик, выходом соединенный с первым формирователем сигналов и через второй формирователь сигналов со счетным входом сметчика отверстий, фотодатчик и второй индуктивный датчик, соединенные с входами второго и третьего формирователей сигналов блок памяти, одновибратор, инвертор, схему совпадения и приводы исполнительных меха- низмов.отл ича ю щеесятем, что, с целью повышения надежности контроля асимметричных деталей, оно дополнительно содержит схемы И-НЕ, элементы ИСКЛЮЧАЮЩЕЕ ИЛИ, элемент задержки, дополнительные инверторы, одновибратор
и счетчик, а блок памяти содержит RS-тригге- ры, при этом выход первого формирователя сигналов соединен непосредственно с входом дополнительного одновибратора и с первыми входами первой и второй схем И0 НЕ и через одновибратор с R-входами RS- триггеров, с входом инвертора и с первыми входами третьей и четвертой схем И-НЕ, выход последней через элемент задержки подключен к первым входам пятой и шестой
5 схем И-НЕ, выходами связанных с входами первого и второго приводов исполнительных механизмов и с входами седьмой схемы И-НЕ, выход которой соединен с первым входом восьмой схемы И-НЕ, выходом через
0 первый дополнительный инвертор подключенной к второму входу третьей схемы И- НЕ, выходом связанной через второй дополнительный инвертор с входом привода третьего исполнительного механизма,
5 выход третьего формирователя сигналов подключен к счетному входу счетчика и к первым входам девятой и десятой схем И- НЕ, выходы которых связаны с S-входами первого и второго RS-триггеров, прямой вы0 ход последнего соединен с первым входом одиннадцатой схемы И-НЕ, выходом подключенной к второму входу пятой схемы И- НЕ и через третий дополнительный инвертор с первым входом двенадцатой
5 схемы И-НЕ, выходом связанной с вторым входом шестой схемы И-НЕ, инвертирующие выходы первого и второго RS-триггеров связаны с входами первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выходом подключенко0 го к первому входу схемы совпадений, выход которого соединен с вторым вводом четвертой схемы И-НЕ. инвертирующий выход второго RS-триггррэ дополнительно соединен с вторым входом двенадцатой схемы
5 И-НЕ, выход инвертора соединен с обнуляющими входами счетчика отверстий и счетчика, выход которого связан с вторым входом схемы совпадений, первьй выход сметчика отверстии соединен с вторыми вхо0 дами первой и девятой схем И-НЕ, второй выход счетчика соединен с вторыми входами второй и десятой схем И-НЕ причем выходы первой и второй схем И-НЕ соединены с S-входами третьего и четвертого RS5 триггеров, инвертирующий выход последнего соединен с вторым входом восьмой схемы l/i-HE, и первым входом второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, прямой выход третьего RS-триггера соединен с вторым входом элемента ИСКЛЮЧАЮЩЕЕ
ИЛИ, выход которого подключен к третьему входу схемы совпадений, третий выход счетчика отверстий связан с четвертым входом схемы совпадений, выход четвертого формирователя сигналов соединен с S-входом
1
19
Фи,г.1
2 16 15 3 18
Риг.2
пятого RS-триггера, выходом подключенного к пятому входу схемы совпадений, при этом выход дополнительного одновибрато- ра соединен с вторым входом одиннадцатой
Ми
Лоток
16
17 13 Щ
ГТП fnsn
/v
ET
Cvj
/
d
SJ
I
-J
-
3з
ЈD
,J
| Автомат для контроля и разбраковки деталей | 1987 |
|
SU1470363A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
