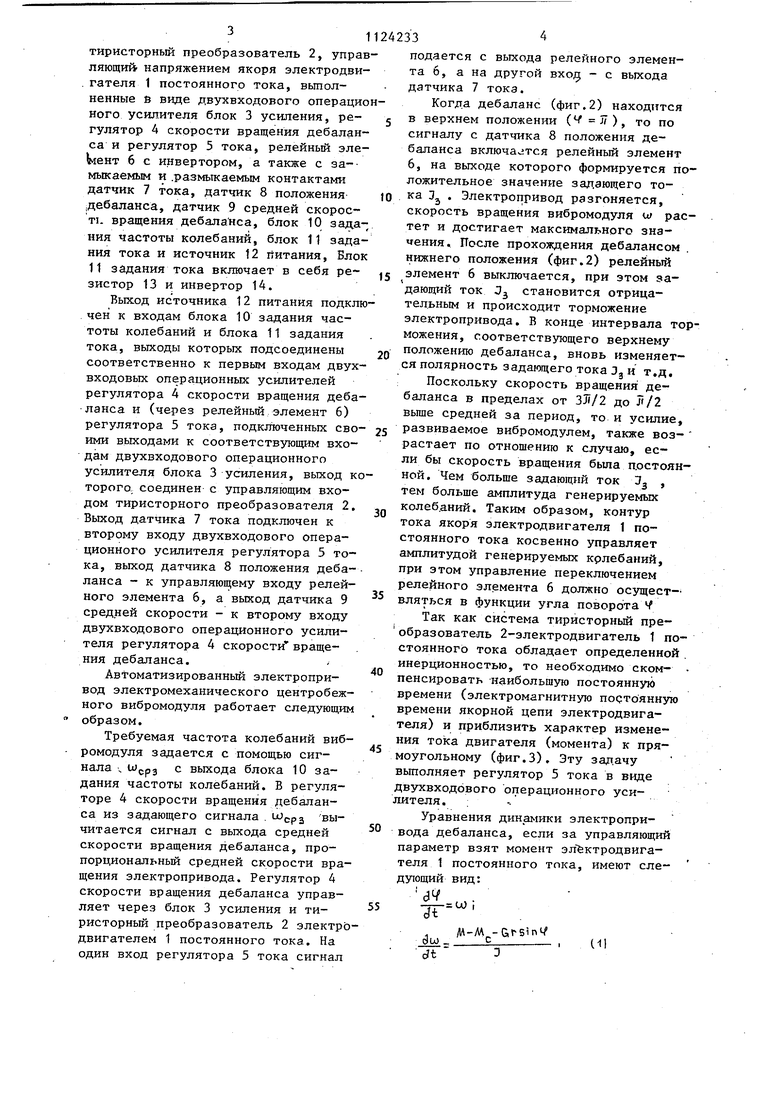
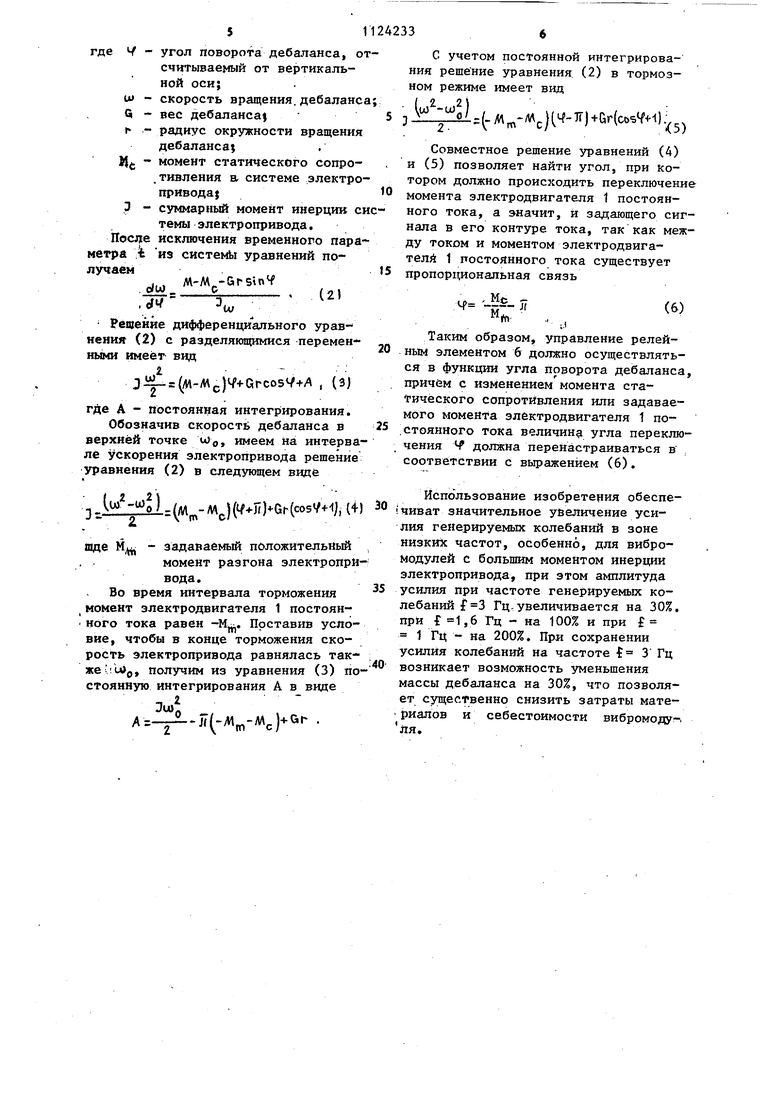
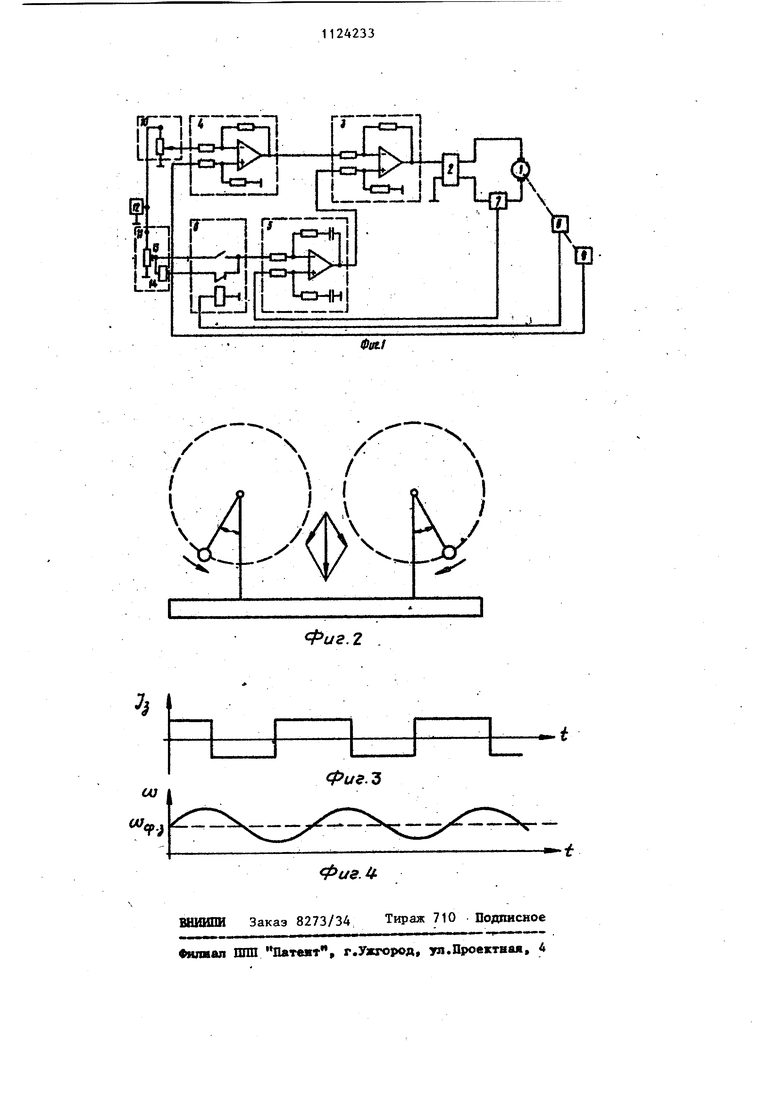
Изобретение относится к автоматизированным электроприводам элек тромеханических вибрационных источников и может найти применение в ус ройствах для сейсморазведки полезны ископаемых, изучения строения земно коры и предсказания землятрясений. Известен автоматизированный элек тропривод, содержащий асинхронный электродвигатель, который через редуктор механически связан с дебалан сом, регулятор скорости вращения и электромеханический источник питания, приводимый во вращение дизел ным агрегатом 1 . Недостатком известного автоматизированного электропривода является зависимость создаваемого усилия виб раций от скорости вращения дебаланса, а следовательно, и от частоты колебаний. Кроме того, электропривод характеризуется высокими массогабаритными показателями, так как на низких частотах требуется значительная масса дебаланса для реализа ции необходимых усилий колебаний. Наиболее близким к предлагаемому является автоматизированный электро привод электромеханического центробежного вибромодуля, содержащий тиристорный преобразователь, электродвигатель постоянного тока, который через редуктор механически связан с дебалансом, блок задания частоты колебаний ,источник питания ,peryлятор скорости вращения дебаланса в виде операционного усилителя и блок усиления в виде операционного усилителя, подключенный своим входо к выходу регулятора скорости вращения дебаланса-И выходом - к управляющему входу тиристорного преобразователя, один из выводов которого соединен с первым вьшодом элек тродвигателя постоянного тока L2 J. Недостатком данного устройства являются повышенные массогабаритные показатели, так как на низких час тотах требуется значительная масса дебаланса для обеспечения необходимых усилий колебаний,что определяет высокую себестоимость устройства. Цель изобретения - снижение себестоимости за счет уменьшения массы дебаланса. Поставленная цель достигается тем, что в устройство, содержащее тиристорный преобразователь, электр двигатель постоянного тока, который через редуктор механически связан с дебалансом, блок задатгя частоты , колебаний, источник питания, регулятор скорости вращения дебаланса в виде операционного усилителя и блок усиления в виде операционного усилителя, подключенный своим входом к выходу регулятора скорости вращения. . дебаланса и выходом - к управляющему входу тиристорного преобразователя, один из выводов которого соединен с первым выводом электродвигателя постоянного тока, введены датчик положения дебаланса, релейный элемент, датчик средней скорости вращения дебаланса, датчик тока, блок задания тока и 15егулятор тока в виде двухвходового.,операционного усилителя, а регулятор скорости вращения дебаланса и блок усиления выполнены в виде двухвходовых операционных усилителей, причем выход релейного элемента подключен к одному входу регулятора тока, подсоединенного своим выходом к другому входу блока усиления и другим входом к выходному выводу датчика тока, два других вывода которого подключены соответственно к вторым выводам тиристорного преобразователя и электродвигателя постоянного тока, управляющий вход релейного элемента соединен с выходом датчика положения дебаланса, выход датчика средней скорости вращения дебаланса соединен с одним из входов регулятора скорости, другой вход которого подключен к выходу датчика частоты колебаний, а входы релейного элемента соединены с соответствующими выходами блока задания тока.. На фиг.1 приведена структурная схема автоматизированного электропривода электромеханического центробежного вибромодуля; на фиг. 2 - схема формирования вибромодулем возмущающей силы F; на фиг..З - диаграмма изменения задающего тока Ц. ; на фиг. 4 - кривая переходного процесса для скорости электродвигателя и/ относительно среднего значения срЪ Автоматизированный электропривод электромеханического центробежного вибромодуля (фиг.1) содержит электродвигатель 1 постоянного тока, которьй через редуктор механически связан с дебалансом (не показан), 3 тиристорный преобразователь 2, упра ляющий напряжением якоря электродви . гателя 1 постоянного тока, вьтолненные в виде двухвходового операци ного усилителя блок 3 усиления, регулятор 4 скорости вращения дебалан са и регулятор 5 тока, релейный эле 1мент 6 с инвертором, а также с за-мыкаемым и .размыкаемым контактами датчик 7 тока, датчик 8 положения ,дебаланса, датчик 9 средней скорость вращения дебаланса, блок 10 зада ния частоты колебаний, блок 11 зада ния тока и источник 12 питания. Бло 11 задания тока включает в себя резистор 13 и инвертор 14. Выход источника 12 питания подкл чен к входам блока 10 задания частоты колебаний и блока 11 задания тока, выходы которых подсоединены соответственно к первым входам двук входовых операционных усилителей регулятора 4 скорости вращения деба ланса и (через релейный элемент 6) регулятора 5 тока, подключенных сво ими выходами к соответствующим входам двухвходового операционного усилителя блока 3 усиления, выход к торого, соединен с управляющим входом тиристорного преобразователя 2. Выход датчика 7 тока подключен к второму входу двухвходового операционного усилителя регулятора 5 тока, выход датчика 8 положения дебаланса - к управляющему входу релейного элемента 6, а выход датчика 9 средней скорости - к второму входу двухвходового операционного усилителя регулятора 4 скорости вращения дебаланса. Автоматизированный электропривод электромеханического центробежного вибромодуля работает следующим образом. Требуемая частота колебаний вибромодуля задается с помощью сигнала . Wppg с выхода блока 10 задания частоты колебаний. В регуляторе 4 скорости вращения дебаланса из задающего сигнала . iчитается сигнал с выхода средней скорости вращения дебаланса, пропорциональный средней скорости вращения электропривода. Регулятор 4 скорости вращения дебаланса управляет через блок 3 усиления и тиристорный преобразователь 2 электро двигателем 1 постоянного тока. На один вход регулятора 5 тока сигнал 3 подается с выхода релейного элемента 6, а на другой Bxofj - с выхода датчика 7 тока. Когда дебаланс (фиг.2) находится в верхнем положении ( J), то по сигналу с датчика 8 положения дебаланса включается релейный элемент 6, на выходе которого формируется положительное значение задающего тока 3 . Электропривод разгоняется, скорость вращения вибромодуля и; растет и достигает максимального значения. После прохождения дебалансом нижнего положения (фиг.2) релейный элемент 6 выключается, при этом задающий ток 3 становится отрицательным и происходит торможение электропривода. В конце интервала торможения, соответствующего верхнему положению дебаланса, вновь изменяется полярность задающего тока Jj и т.д. Поскольку скорость вращения: дебаланса в пределах от 3Ti/2 до Л/2 выше средней за период, то и усилие, развиваемое вибромодулем, также возрастает по отношению к случаю, если бы скорость вращения бьша прстоянной. Чем больше задающий ток з тем больше амплитуда генерируемых колеб.аний. Таким образом, контур тока якоря электродвигателя 1 постоянного тока косвенно управляет амплитудой генерируемых крлебаний, при этом управление переключением релейного элемента 6 должно осуществляться в функции угла поворота f Так как система тиристорный преобразователь 2-электродвигатель 1 постоянного тока обладает определенной инерционностью, то необходимо ском- пенсировать наибольшую постоянную времени (электромагнитную постоянную времени якорной цепи электродвигателя) и приблизить характер изменения тока двигателя (момента) к прямоугольному (фиг.З). Эту зал.ачу выполняет регулятор 5 тока в виде двухвходового операционного усиителя. : -. Уравнения динамики электропривода дебаланса, если за управляющий параметр взят момент элёктродвига- теля 1 постоянного тока, имеют следующий вид: . M-M -Grsint/ du) g где Ч - угол поворота дебаланса, от считываемый от вертикальной оси; и - скорость вращения, дебаланс G - вес дебаланса| - радиус окружности вращения дебаланса; tH - момент статического сопротивления а системе электропривода) 3 - суммарный момент инерци си темы электропривода. После исключения временного параметра .ib из систеьЛ уравнений по лучаем ,„ M-M -arstn f Зц, Рещение дифференци ального уравнения (2) с разделяющимися переменными имеет вид (/И-Mc.)f -arco5 /+Л , (3) где А - постоянная интегрирования. Обозначив скорость дебаланса в верхней точке и)о, имеем йа интерва ле ускорения электропривода решение уравнения (2) в следующем виде иХ)-/дл -мJ()Gr(,{4 п Щ С шде М - задаваемый положительный . . момент разгона электропри вода . Во время интервала торможения момент электродвигателя 1 постоян ного тока равен -М. Поставив условие, чтобы в конце торможения скорость электропривода равнялась также ,, получим из уравнения (3) по стоянную интегрирования А в виде ( С учетом постоянной интегрирования решение уравнения (2) в тормозном режиме имеет вид (. Совместное решение уравнений (4) и (5) позволяет найти угол, при Котором должно происходить переключение Момента электродвигателя 1 постоянного тока, а значит, и задающего сигнала в его контуре тока, так как между током и моментом электродвигатели 1 постоянного тока существует пропорциональная связь ч- J Таким образом, управление релейным элементом 6 должно осуществляться в функции угла поворота дебаланса, причем с изменением момента статического сопротивления или задаваемого момента электродвигателя 1 по стоянного тока величина угла переключения f должна перенастраиваться в соответствии с выражением (6). Использование изобретения обеспениват значительное увеличение усилия генерируемых колебаний в зоне низких частот, особенно, для вибромодулей с большим моментом инерции электропривода, при этом амплитуда усилия при частоте генерируемых колебаний Гц.увеличивается на 30%, при -f 1,6 Гц - на 100% и при - 1 Гц - на 200%, При сохранении усилия колебаний на частоте { 3 Гц возникает возможность уменьшения массы дебаланса на 30%, что позволяет существенно снизить затраты материалов и себестоимости вибромоду-, ля.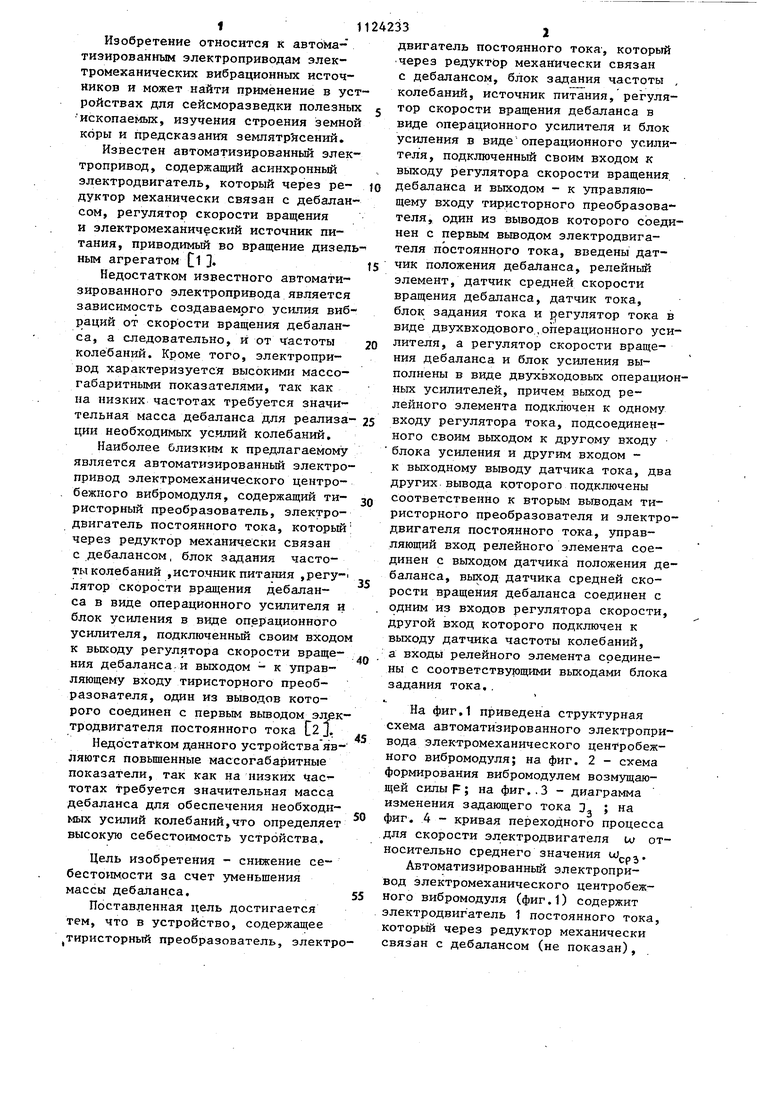
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Способ формирования силового воздействия для возбуждения низкочастотных сейсмических сигналов и автоматизированный электропривод дебалансного вибромодуля | 1986 |
|
SU1462216A1 |
| Система подчиненного регулирования частоты вращения электропривода | 1985 |
|
SU1288881A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Способ автоматического регулирования скорости нереверсивного вентильного электропривода и нереверсивный электропривод постоянного тока | 1990 |
|
SU1831764A3 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ ОБРЫВА ЦЕПИ ПИТАНИЯ ЯКОРЯ ЭЛЕКТРОДВИГАТЕЛЯ ТИРИСТОРНОГО ЭЛЕКТРОПРИВОДА | 1984 |
|
SU1384160A1 |
| Асинхронный электропривод | 1983 |
|
SU1150723A1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ЭЛЕКТРОМЕХАНИЧЕСКОГО ЦЕНТРОБЕЖНОГО ВИБРОМОДУЛЯ, содержащий тиристорный преобразователь, электродвигатель постоянного тока, который через редуктор механически свяэан с дебалансом, блок задания частоты колебаний, источник питания, регулятор скорости вращения дебаланса в виде операционного усилителя и блок усиления в виде операционного усилителя, подключенный своим,входоц к выходу регулятора скорости вращения дебаланса. и выходом - к управляющему входу тиристорного преобразователя. один из выводов которого соединен с первым вьшодом электродвигателя постоянного тока, отличающийся тем,что, с целью снижения себестоимости за счет уменьшения массы дебаланса, в него введены датчик положения дебаланса, релейный элемент, датчик средней скорости вращения„дебаланса, датчик тока, блок задания тока и регулятор тока в виде двухвходового операционного усилителя, а регулятор скорости вращения дебаланса и блок усиления выполнены в виде двухвходовых операционных усилителей, причем выход релейного элемента подключен к одному входу регулятора тока, подсоеди(Л ненного своим выходом к другому входу блока усиления и другим входом к выходному выводу датчика тока, два других вывода которого подключены соответственно к вторым выводам тиристорного преобразователя и электродвигателя постоянного тока, управляющий вход релейного элемента со1C Ф единен с выходом датчика положения .дебаланса, выход датчика средней скоtc рости вращения дебалакса соединен OP. с одним из входов регулятора скорос00 ти, другой вход которого подключен к выходу датчика час1;оты колебаний, а входы релейного элемента соединены с соответствующими выходами блока задания тока.
/
/.
N
Фиг.2
Фие.Ъ
(ЛЗ
W,
9-;
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гродзянская Т.М | |||
| и др | |||
| Особенности применения вибрационной сейсморазведки в рудной геофизике | |||
| В сб.: Проблемы вибрационного просвечивания Земли | |||
| М., Наука, 1977, с | |||
| Пылеочистительное устройство к трепальным машинам | 1923 |
|
SU196A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Итоговый отчет Института горного дела Сибирского отделения АН СССР, Новосибирск, 1980 (прототип) . | |||
