Устройство для защиты от обрыва цепи питания якоря двигателя относится к области электротехники, в частности к автоматизированным реверсивным электроприводам, работающим с механизмами на активную нагрузку, например, механизмы подъема манипулятора, где существует опасность аварийного перемещения рабочего элемента в результате потери движущего момента, вызванного обрывом цепи питания якоря электродвигателя постоянного тока.
Цель изобретения повышение надежности защиты путем исключения ложных отключений.
На чертеже представлена схема устройства, содержащая тиристорный преобразователь 1, соединенный входными зажимами с питающей сетью, а выходными с якорем электродвигателя постоянного тока 2; преобразователь 1 связан своим входом управления через блок импульсно-фазового управления 3 с регулятором скорости 4, выход которого через датчик состояния регулирования скорости 5 соединен с входом логического блока выявления аварийного режима 6, второй вход которого через датчик тока якоря электродвигателя 7 соединен с цепью якоря электродвигателя, выход логического блока выявления аварийного режима 6 соединен с первым триггером 8, его второй вход соединен с выходом датчика тока возбуждения 9, а его выход соединен с блоком управления электромагнитной тормозной муфтой 10, выход которого соединен с электромагнитной муфтой 11, выход триггера соединен также с входом регулятора скорости, второй вход которого через задатчик скорости 12 соединен с тахогенератором 13, связанным с валом электродвигателя.
Устройство работает следующим образом.
На вход регулятора скорости 4 поступают разность напряжений, задания скорости вращения и сигналы обратной связи по скорости вращения двигателя, снятого с тахогенератора 13, это напряжение, усиленное усилителем, на котором выполнен регулятор скорости 4, является заданием для блока импульсно-фазового управления 3, управляет углом управления тиристоров тиристорного преобразователя 1 и регулирует напряжение на якоре двигателя. По цепи якоря двигателя протекает ток, величина которого определяется по формуле
Uя Eя + Iя˙Rя, (1) где Uя напряжение на якоре двигателя;
Ея э.д.с. двигателя;
Iя ток якоря двигателя;
Rя сопротивление якоря двигателя.
Наличие тока в цепи якоря двигателя контролирует датчик тока якоря двигателя 7, режим работы регулятора скорости 4 (усилительный или насыщения) контролирует датчик положения регулятора скорости 5.
Уровень выходного сигнала регулятора скорости определяется сигналами задания скорости и обратной связи со скорости определения по формуле
Uр.с. (Uв.с. U'о.с.)Wр.с. (2) где Wр.с. коэффициент передачи регулятора скорости 1 (или коэффициент усиления, представленный в оперативной форме);
Uз.с. напряжение задания скорости;
Uо.с. напряжение на выходе тахогенератора 13, который выполняет роль датчика обратной связи по скорости с учетом коэффициента приведения к величине Uз.с.
В установившемся режиме, когда скорость двигателя 9 соответствует заданной. Uо.с. примерно равно Uз.с. (Uо.с.≈Uз.с.).
В то же время для замкнутого контура регулирования скорости напряжение на выходе регулятора скорости 1 установится в соответствии с упрощенной зависимостью.
Up.c=  (3)
(3)
В формуле (3) Кув коэффициент передачи управляемого выпрямителя.
Напряжение на выходе регулятора скорости 4 в зависимости от работы электропривода (режим переходного процесса и установившийся режим) может быть двух уровней соответственно: большой и малый уровень напряжения. При переходных процессах в электроприводе по формуле (2), когда Uз.с.≠Uо.с. (так как коэффициент передачи регулятора скорости 1 достаточно большой), на выходе регулятора скорости 1 будет большое напряжение, срабатывает датчик состояния регулятора скорости 5 и подает сигнал "1" на вход логического блока выявления аварийного режима 6. По цепи якоря электродвигателя 2 также протекает ток переходного процесса (величина которого достаточно большая) и датчик тока якоря двигателя 7 подает сигнал "1" на вход логического блока выявления аварийного режима 6.
При установившемся режиме работы напряжения напряжение на выходе регулятора скорости 4 снижается до малого уровня сигнала. Датчик состояния регулятора скорости имеет порог срабатывания и при малом уровне сигнала на выходе регулятора скорости 4 на вход логического блока выявления аварийного режима 6 приходит сигнал "0".
В установившемся режиме по якорю двигателя 2 протекает малый ток, с выхода датчика тока якоря двигателя 3 на вход логического блока придет сигнал "0". Величина тока, протекающего по якорю двигателя 2, связана прямой зависимостью с величиной напряжения на выходе регулятора скорости 4.
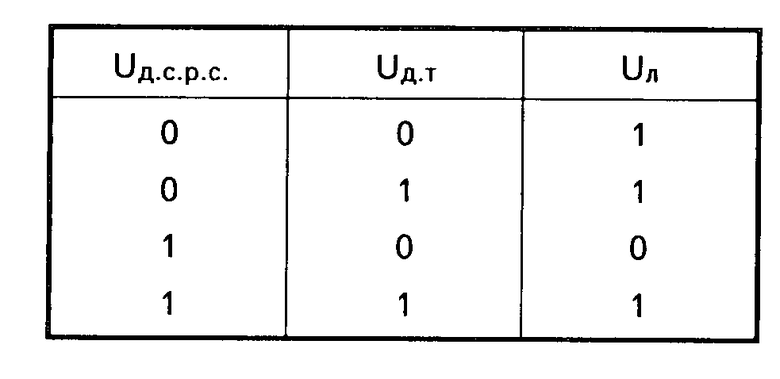
Сигнал на выходе логического блока выявления аварийного режима 6 можно представить таблицей истинности где Uд.с.р.с. сигнал на выходе датчика состояния регулятора скорости 4;
Uд.т. сигнал на выходе датчика тока 3;
Uл сигнал на выходе логического блока 5.
Из таблицы видно, что 1 и 4 строки соответствуют нормальному режиму работы электропривода.
Строка 1 соответствует установившему режиму.
Строка 4 соответствует режиму переходного процесса.
Строка 3 соответствует аварийной ситуации, когда происходит обрыв якоря электродвигателя 9.
Обрыв якорной цепи приводит к исчезновению тока якоря двигателя.
В этом случае датчик тока якоря двигателя 7 подает на вход логического блока выявления аварийного режима 6 логический сигнал "0".
Но так как нет тока якоря двигателя 2, то и нет момента двигателя 2, потому что Iя ≡Мд, где Мg момент, развиваемый двигателем.
Потеря двигательного момента приводит к несоответствию скорости вращения двигателя 2 заданной скорости, т.е. Uз.с.≠Uо.с.
На выходе регулятора скорости 4, как и при переходных процессах, появится большой уровень напряжения и датчик состояния регулятора скорости 5 подаст на вход логического блока 6 логический сигнал "1".
Логический блок воспринимает такую комбинацию сигналов согласно таблице (Uл 0) как наличие аварийной ситуации и переключает триггер 8. Он подает сигнал отключения в блок управления электромагнитной тормозной муфты 10 и сигнал, блокирующий регулятор скорости 4 (что приводит к одновременному срабатыванию электромагнитной тормозной муфты 11, тормозящей вал двигателя 2, и отключению тиристорного преобразователя 11 путем переведения углов открывания тиристоров в нерабочую зону).
Для того, чтобы перевести триггер 8 в исходное состояние, необходимо отключить электропривод от сети, устранить неисправность (восстановить цепь питания якоря и обмотки возбуждения электродвигателя), после чего опять включить электропривод.
Датчик состояния регулятора скорости 5 может быть выполнен на релейном элементе с порогом срабатывания, например операционном усилителе, включенном в компараторном режиме.
Как видно из формулы (3), при прохождении характеристики тока через ноль на выходе регулятора скорости 4 будет малый уровень напряжения, поэтому на обоих входах блока выявления аварийного режима 6 будут сигналы "0" и логический блок выявления аварийного режима 5 не включится (см. табл.1).
Порог срабатывания датчика состояния регулятора скорости устанавливается таким, чтобы его значение всегда было больше  для системы регулирования не имеющей положительной обратной связи, компенсирующей влияние э.д.с. на ток двигателя и всегда больше
для системы регулирования не имеющей положительной обратной связи, компенсирующей влияние э.д.с. на ток двигателя и всегда больше при наличии положительной обратной связи по э.д.с. двигателя.
при наличии положительной обратной связи по э.д.с. двигателя.
В таблице строка 2 не имеет физического смысла, так как ток по цепи якоря двигателя 2 протекать без задания на него не может.
В описании изобретения приведен один из вариантов реализации логического устройства.
Назначение логического блока выявления аварийного режима 6 выявлять ситуацию, когда имеется задание на протекание тока, а сам ток отсутствует. В частном случае это вызывается обрывом цепи якоря двигателя.
Устройство защиты от обрыва цепи питания якоря двигателя применено в электроприводе КУШБМ-1М, серийно выпускаемом на АЭМЗ.
При эксплуатации электропривода ложных срабатываний защиты не наблюдается. При проверке функционирования защиты она действовала надежно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТИРИСТОРНЫЙ ВОЗБУДИТЕЛЬ ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2050661C1 |
| Электропривод постоянного тока буровой лебедки | 1988 |
|
SU1577055A1 |
| Электропривод | 1989 |
|
SU1735994A1 |
| УСТРОЙСТВО КОНТРОЛЯ НАПРЯЖЕНИЯ В ЯКОРНОЙ ЦЕПИ ДВИГАТЕЛЯ | 2016 |
|
RU2634349C1 |
| Реверсивный электропривод | 1983 |
|
SU1116514A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТНОГО ОТКЛЮЧЕНИЯ ТИРИСТОРНОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ ОБРЫВЕ СИЛОВОЙ ЦЕПИ | 1992 |
|
RU2117373C1 |
| Устройство для управления аккумуля-TOPOM пОлОСы | 1979 |
|
SU814499A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОБРЫВА ЦЕПИ ТАХОГЕНЕРАТОРА | 1996 |
|
RU2126162C1 |
| Электропривод | 1987 |
|
SU1534723A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
Изобретение относится к электротехнике, в частности к устройствам для защиты от обрыва цепи питания электродвигателя тиристорного электропривода. Цель изобретения - повышение надежности путем исключения ложных срабатываний защиты. Устройство содержит тиристорный преобразователь 1, электродвигатель постоянного тока 2, блок импульсно-фазового управления 3 с регулятором скорости 4, датчик состояния регулирования скорости 5, блок выявления аварийного режима 6, датчик тока якоря 7, первый триггер 8, датчик тока возбуждения 9, блок управления электромагнитной муфтой 10, электромагнитную муфту 11, задатчик скорости 12, тахогенератор 13. Обрыв якорной цепи приводит к исчезновению тока якоря. Датчик тока якоря двигателя 7 подает на вход логического блока выявления аварийного рижема 6 логический сигнал "0". На выходе регулятора скорости 4 появится большой уровень напряжения и датчик состояния регулятора скорости 5 подает на вход логического блока 6 логический сигнал единица. Логический блок фиксирует аварийную ситуацию и через переключенный триггер 8 подает сигнал включения электромагнитной муфте 11 и отключения тиристорного преобразователя 11 путем переведения углов открывания тиристоров в нерабочую зону. 1 ил.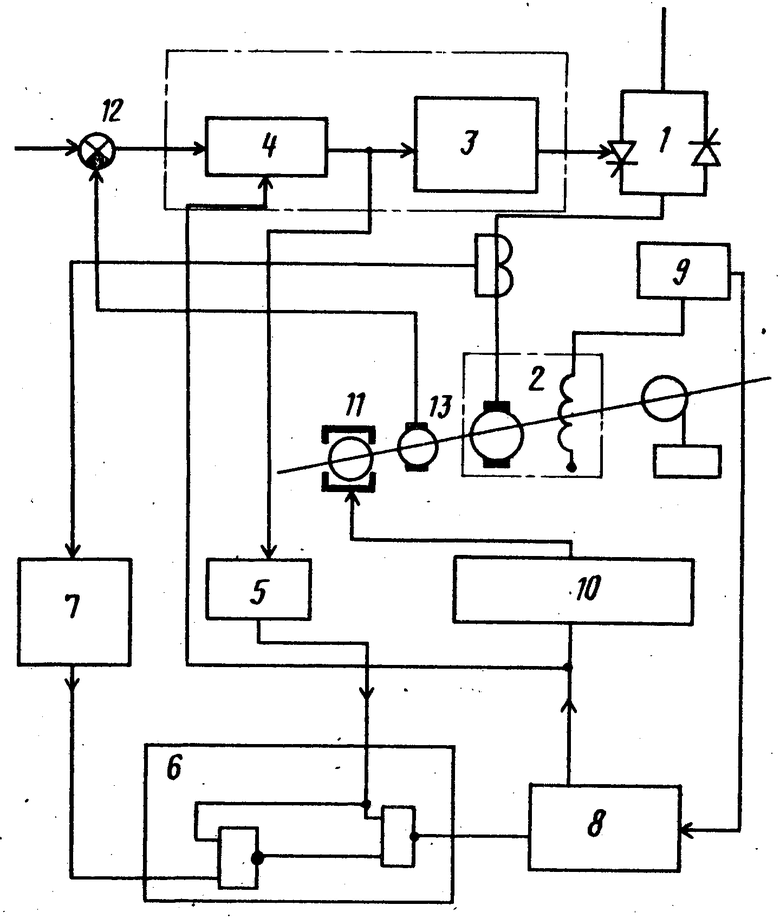
УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ ОБРЫВА ЦЕПИ ПИТАНИЯ ЯКОРЯ ЭЛЕКТРОДВИГАТЕЛЯ ТИРИСТОРНОГО ЭЛЕКТРОПРИВОДА, снабженного электромагнитной тормозной муфтой с блоком управления, содержащее датчик тока якоря, с выводами для подключения в цепь якоря и датчик тока возбуждения с выводами для подключения в цепь обмотки возбуждения, при этом выход датчика тока якоря присоединен к первому входу логического блока выявления аварийного режима, отличающееся тем, что, с целью повышения надежности путем исключения ложных срабатываний защиты, дополнительно введены датчик состояния регулятора скорости тиристорного электропривода и выходной триггер, первый вход которого соединен с выходом логического блока выявления аварийного режима, второй вход присоединен к выходу датчика тока возбуждения, а выходные выводы триггера предназначены для подключения к входу управления регулятора скорости тиристорного электропривода и к входу управления электромагнитной тормозной муфтой, датчик состояния регулятора скорости снабжен входными выводами для подключения к выходу управления регулятора скорости тиристорного электропривода и к входу управления электромагнитной тормозной муфтой, датчик состояния регулятора скорости снабжен входными выводами для подключения к выходу регулятора скорости тиристорного электропривода и выходными выводами, соединенными с ворым входом логического блока выявления аварийного режима.
| Электропривод постоянного тока | 1978 |
|
SU838919A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
