1115 Изобретение относится к электротехнике и может быть использовано в автоматизированных электроприводах, а именно, в системах управления вентильными преобразователями, предназначенными для управления скорость асинхронных электродвигателей.с фазным ротором. Известен асинхронный тиристорный электропривод, содержащий электродвигатель с фазным ротором и тиристорный регулятор с системой управления. Датчик обратной связи электропривода вьтолнен в виде последовательно соединенных фильтра, формирователя прямоугольных импульсов, сумматора, преобразователя частоты в напряжение и усилителя ij . Недостатком данного электропривод является низкое быстродействие вслед ствие контроля датчиком обратной связи среднего значения скорости вра щения ротора электродвигателя. Наиболее близким к изобретению по технической сущности и достигаемому результату является асинхронный тиристорный электропривод, содержащи электродвигатель с фазньм ротором и тиристорный преобразователь, включенный в роторную цепь электродвигателя, датчик частоты тока ротора, выполненный в виде нуль-органа, блок задержки и последовательно соединенных стабилизатора, выпрямителя и опе рационного усилителя, выход датчика тока ротора через блок формирования подключен к системе управления преобразователем 2j . Недостатком известного устройства является влияние на выходной сигнал датчика частоты тока сигнала помехи, выражакяцееся в том. что при работе электродвигателя под нагрузкой из-за падения напряжения на сопротивлении ротора величина роторного напряжения не соответствует скольжению, что в конечном итоге приводит к появлению дополнительной погрешности измерения величины скорости вращения ротора двигателя. Цель изобретения - повьшение точности регулирования скорости за счет повьопения помехоустойчивости датчика частоты тока ротора. Указанная цель достигается тем, чточВ асинхронном электроприводе, содержащем электродвигатель с фазным ротором, тиррсторный преобразовател выходом подключенный к роторной цепи электродвигателя, систему управления, выход которой связан с управляющим входом тиристорного преобразователя, датчик частоты тока ротора, снабженный первым блоком задержки, нульорган, операционный усилитель, блок формирования сигнала задания, первым входом соединенный с источником задания, вторым входом - с выходом датчика частоты тока ротора, а выходом - с входом системы управления, датчик частоты тока ротора дополнительно снабжен фильтром низких частот, вторым б.локом задержки и аналоговым делителем, при этом вход Делимое аналогового делителя через фильтр низких частот подключен к фазному ротору, вход Делитель аналогового делителя через первый блок задержки подключен к выходу фильтра низких частот, а выход аналогового делителя подключен к выходу операционного усилителя, управляющий вход которого через нуль-орган и второй блок задержки соединен с выходом первого блока задержки. На фиг. 1 показана функциональная схема асинхронного электропривода; на фиг. 2 - временные диаграммы. I Устройство содержит асинхронный электродвигатель 1 с фазным ротором, тиристорный преобразователь 2, выходом подключенный к роторной цепи электродвигателя 1, а управляющий вход тиристорного преобразователя соединен с выходом системы управления 3. Вход системы управления соединен с выходом блока формирования сигнала задания 4, первый вход которо.го связан с источником задания 5, а второй вход - с датчиком частоты тока 6, который содержит фильтр низких частот 7, первый и второй блоки задержки 8 и 9, нуль-орган 10, аналоговый делитель 11, операционный усилитель 12. Вход Делимое аналогового делителя 10 через фильтр низких частот 6 подключен к роторной цепи электродвигателя, вход Делитель аналогового делителя 10 через первьй блок задержки 7 подключен к выходу фильтра низких частот, а выход аналогового делителя подключен к входу операционного усилителя 12, управляющий вход которого через нульорган 9 и второй блок задержки соединен с вьпсодомпервого блока задержки..
Устройство работает следующим образом.
При подаче на вход блока формирования сигнала задания 4 напряжения от источника задания на его выходе формируется сигнал, воздействующий на систему управления преобразователя 3 таким образом, что на вентили тиристорного преобразователя 2 начинают подаваться управляющие импульсы в соответствии с заданным алгоритмом управления. Электродвигатель 1 приводится во вращение.
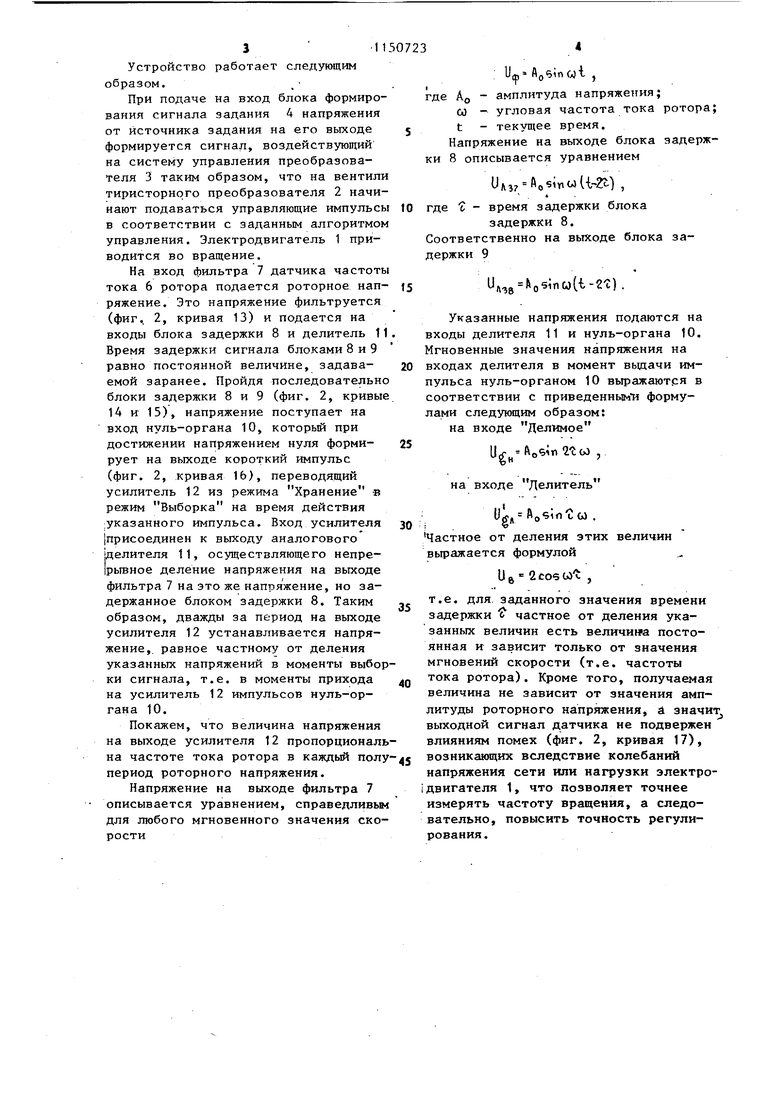
На вход фильтра 7 датчика частоты тока 6 ротора подается роторное нап- ряжение. Это напряжение фильтруется (фиг.. 2, кривая 13) и подается на входы блока задержки 8 и делитель 11 Время задержки сигнала блоками 8 и 9 равно постоянной величине, задава- емой заранее. Пройдя последовательно блоки задержки 8 и 9 (фиг. 2, кривые 14 и 15), напряжение поступает на вход нуль-органа 10, который при достижении напряжением нуля формирует на выходе короткий импульс (фиг. 2, кривая 16), переводящий усилитель 12 из режима Хранение -в режим Выборка на время действия :указанного импульса. Вход усилителя присоединен к выходу аналогового йелителя 11, осуществляющего непре|рьгеное деление напряжения на выходе фильтра 7 на это же напряжение, но задержанное блоком задержки 8. Таким образом, дважды за период на выходе усилителя 12 устанавливается напряжение, равное частному от деления указанных напряжений в моменты выборки сигнала, т.е. в моменты прихода на усилитель 12 импульсов нуль-органа 10.
Покажем, что величина напряжения на выходе усилителя 12 пропорциональна частоте тока ротора в каждый полупериод роторного напряжения.
Напряжение на выходе фильтра 7 описывается уравнением, справедливым для любого мгновенного значения скорости
иф A(,6;ncoi , где АО - амплитуда напряжения;
6} - угловая частота тока ротора; t - текущее время. Напряжение на выходе блока задержки 8 описывается уравнением
илзг Ао5п01(1-2г) ,
где - время задержки блока
задержки 8.
Соответственно на выходе блока задержки 9
U,g Ao5inQ(t-2c) .
Указанные напряжения подаются на входы делителя 11 и нуль-органа 10. Мгновенные значения напряжения на входах делителя в момент вьщачи импульса нуль-органом 10 вьфажаютря в соответствии с приведенными формулами следующим образом:
на входе Делимое
, на входе Делитель
AoSino со .
Частное от деления этих величин выражается формулой
и 6 2 сое Wt ,
т.е. для заданного значения времени задержки частное от деления указанных величин есть величи1«а постоянная и зависит только от значения мгновений скорости (т.е. частоты тока ротора). Кроме того, получаема величина не зависит от значения амплитуды роторного напряжения, d знач выходной сигнал датчика не подвержен влияниям помех (фиг. 2, кривая 17), возникёшщих вследствие колебаний напряжения сети или нагрузки электр:двигателя 1, что позволяет точнее измерять частоту вращения, а следовательно, повысить точность регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный тиристорный электропривод | 1981 |
|
SU1001411A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Способ пуска асинхронного электродвигателя и устройство для его осуществления | 1990 |
|
SU1774453A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока | 1990 |
|
SU1758821A1 |
| Способ реверса асинхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU970620A1 |
| Электропривод переменного тока | 1980 |
|
SU955482A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий электродвигатель с фазным ротором, тиристорный преобразователь, ;выходом подключенный к роторной цепи электродвигателя, систему управления, выход которой связан с управляющим входом тиристорного преобразователя, датчик частоты тока ротора, снабженный первым блоком задержки, нуль-орган, операционный усилитель, блок формирования сигнала задания, первым входом соединенный с источником задания, вторым входом - с выходом датчика частоты тока ротора, а выходом - с входом системы управления, отличающий ся тем, что, с целью повышения точности регулирования скорости, датчик частоты тока ротора дополнительно снабжен фильтром низких частот, вторым блоком задержки и аналоговым делителем, при этом вход Делимое аналогового делителя через фильтр низких- частот подключен к фазному ротору, вход Делитель аналогового делителя через первый блок задержки подключен к выходу фильтра низких-частот, а выход аналогового делителя подключен к выходу операционного усилителя, (Я управляющий вход которого через нуль-орган и второй блок задержки соединен с виходом первого блока задержки.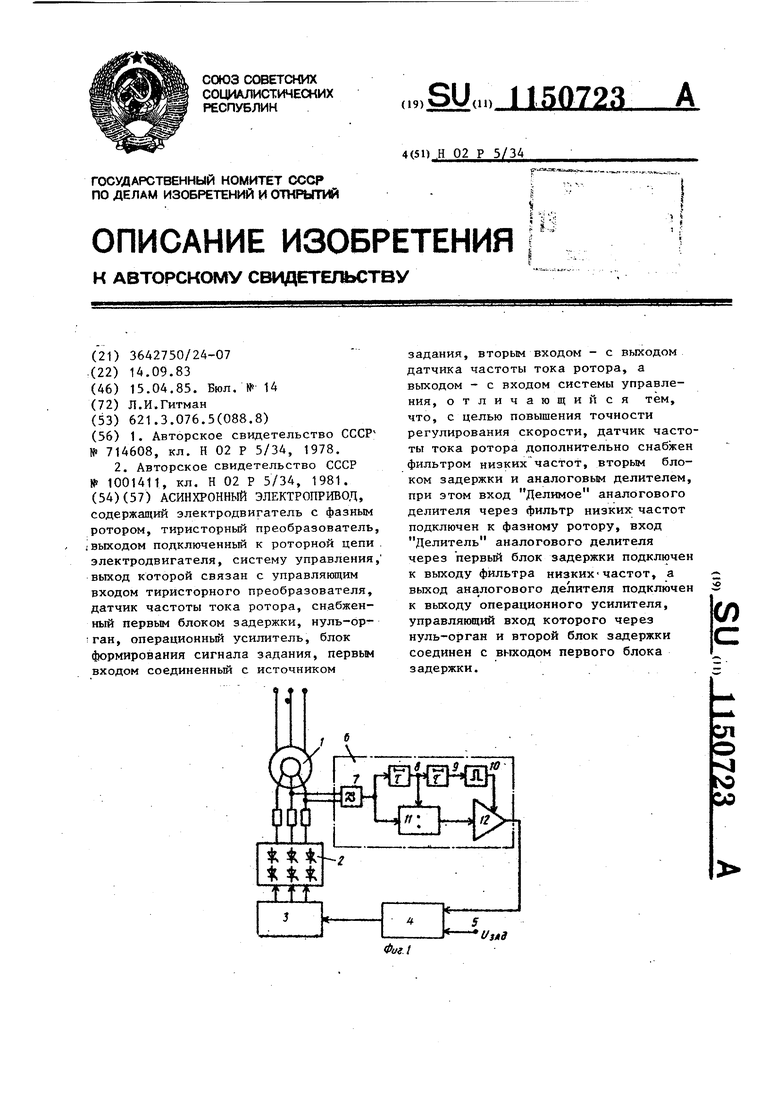
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Асинхронный тиристорный электропривод | 1978 |
|
SU714608A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Асинхронный тиристорный электропривод | 1981 |
|
SU1001411A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
