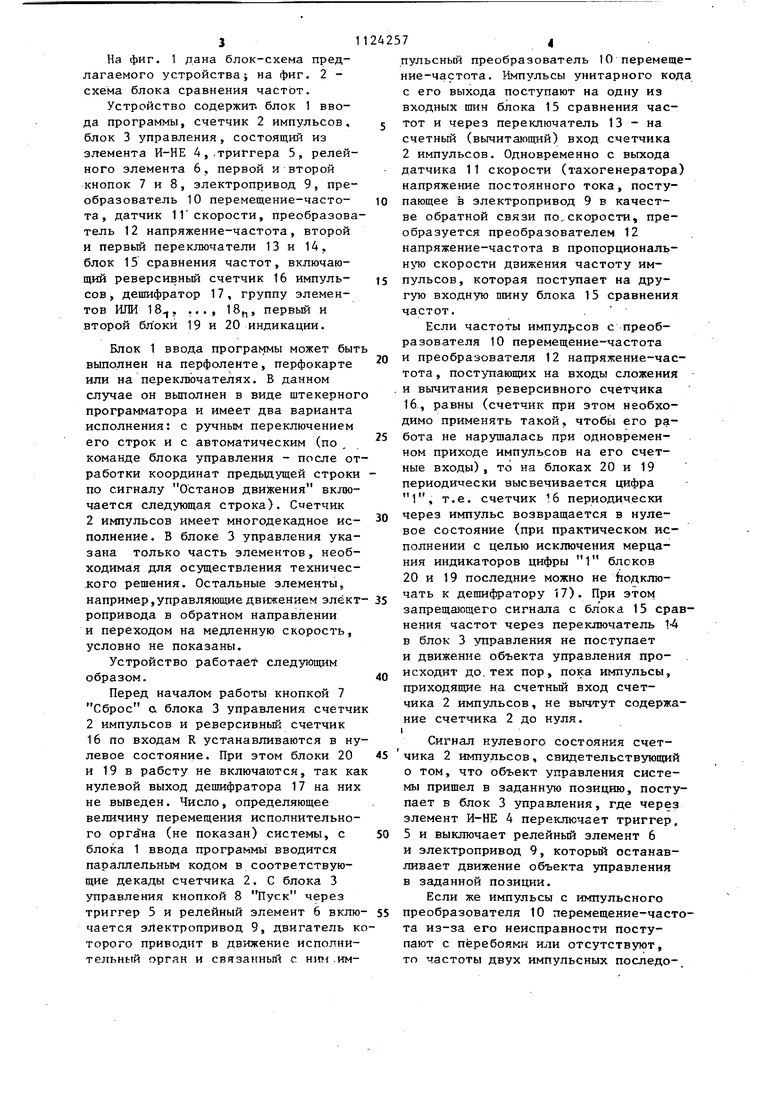
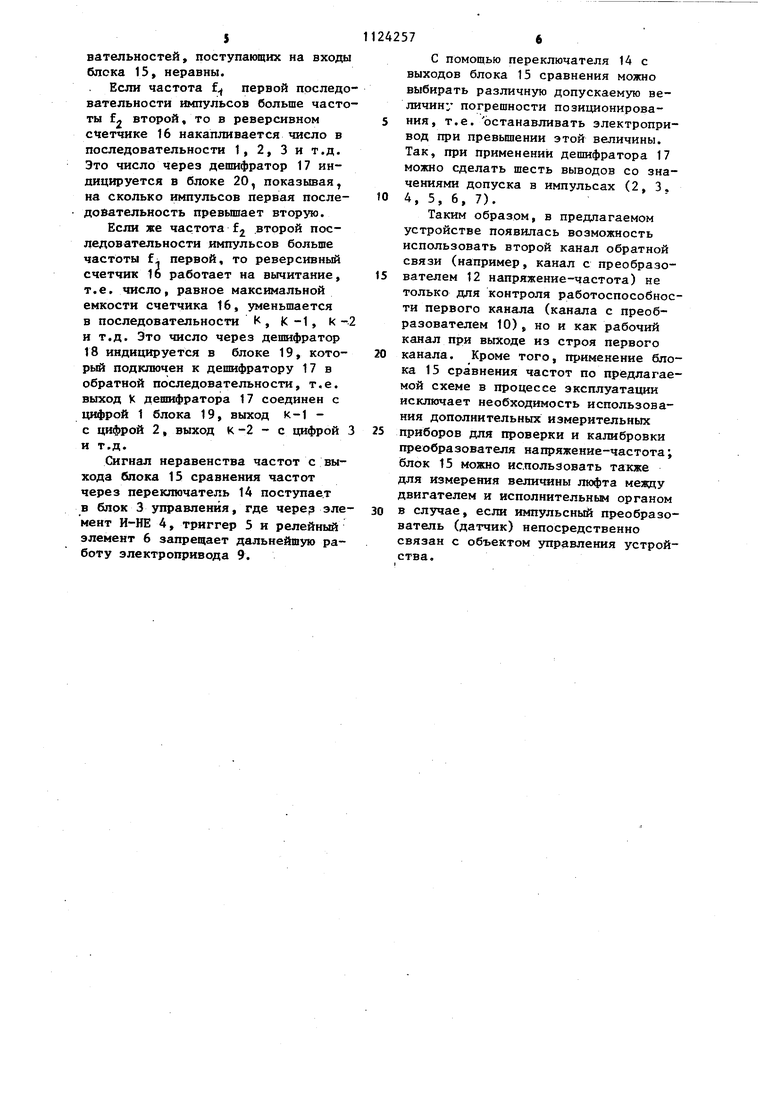
1 Изобретение относится к системам автоматизации в промьпи.пенности и может найти применение для автоматизации различных производственных процессов: сверления, точечной сварки и т.д. , в частности, для автоматизации процесса гиба трубогибочного станка. Известно устройство для программного управления приводом координат ного стола станка, содержащее индик - тор ошибки, регистр, соединенньм с блоком задания программы, и блок сравнения, входы которого подключены к датчику перемещения стола и к выходу блока задания программы, а выход - к управляющему выходу устройства, кроме того, устройство содержит последовательно соединенные циклический кодовьй датчик положения стола и дополнительный блок сра нения , другой вход и выход которого подключены соответственно к выходу регистра и к входу индикатора ошибки 1. Недостатком известного устройства являются ограниченные функционал ные возможности, так как при выходе из строя одного из датчиков перемещения устройства нет возможности перейти, в случае производственной необходимости, на работу от другого исправного датчика. Кроме того, в случае обрыва связи между основным датчиком и счетчиком движение стола не прекращается до достижения им упора, что приводит к браку в работе. Наиболее близкой к предлагаемому устройству является число-импульсная система программного Управления, содержащая устройство вводапрограммы, подключенное через последовательно соединенный блок совпа дения и командное устройство к исполнительному двигателю, связанному с тахогенератором, соединенным через устройство обратной связи по скорости с исполнительным двигателем, и последовательно соединенные преобразователь напряжение-частота подключенньм к тахогенератору, и счетчик импульсов, вход которого соединен с одним из входов блока совпадения {,2}. Недостатком указанной системь является низкая надежность, так как выходные импульсы с преобразо572вателя напряжение-частота не контролируются, что может привести к браку в работе при неисправности преобразователя напряжения-частота. Кроме того, отсутствие датчика перемещения и встроенного блока контроля, с помощью которых можно было бы тарировать работу преобразователя напряжение-частота в соответствии с величиной перемещения исполнительного органа (калибровать частоту преобразователя)-; снижает надежность системы. Цель изобретения - повышение надежности устройства. Поставленная цель достигается тем, что в устройство для позиционного управления, содержащее блок ввода программы, подключенный выходами к соответствующим установочным входам счетчика импульсов, блок управления , содержащий элемент И-НЕ, подключенный первым входом к нулевому выходу счетчика импульсов, а выходом - к нулевому входу триггера, соединенного инверсным выходом через релейный элемент с информационным входом электропривода, механически связанного с датчиком скорости, включенным в цепь обратной связи по скорости электропривода, преобразователь напряжение-частота, подключенный входом к выходу датчика скорости, введены преобразователь перемещение-частота, первый и второй переключатели, реверсивный счетчик импульсов, дещифратор, группа элементов ИЛИ, подключенных выходами через первый переключатель к . второму входу элемента И-НЕ, а первым и вторым входами - к соответствующим выходам дешифратора, соединенного входами с выходами реверсивного счетчика импульсов, подключенного вычитающим и суммирующим входами через второй переключатель к счетному входу счетчика импульсов и к выходам соответственно преобразователя напряжение-частота и преобразователя перемещение-частота, механически связанного с электроприводом, причем сбросовые выходы счетчика импульсов и реверсивного счетчика импульсов подключены через первую кнопку к шине нулевого потенциала и к первому вьгеоду второй кнопки, соединенной вторым выводом с единичным входом трнггеря. 3 На фиг. 1 дана блок-схема предлагаемого устройства; на фиг. 2 схема блока сравнения частот. Устройство содержит, блок 1 ввода программы, счетчик 2 импульсов, блок 3 управления, состоящий из элемента И-НЕ 4,,триггера 5, релейного элемента 6, первой и второй кнопок 7 и 8, электропривод 9, преобразователь 10 перемещение-частота, датчик 1Г скорости, преобразова тель 12 напряжение-частота, второй и первый переключатели 13 и 14. блок 15 сравнения частот, включающий реверсивный счетчик 16 импульсов, дешифратор 17, группу элементов ИЛИ 18. ..., 18, первый и второй блоки 19 и 20 индикации. Блок 1 ввода программы может быт выполнен на перфоленте, перфокарте или на переключателях. В данном случае он вьшолнен в виде штекерног программатора и имеет два варианта исполнения: с ручным переключением его строк и с автоматическим (по . команде блока управления - после от работки координат предьиущей строки по сигналу Останов движения включается следующая строка). Счетчик 2 импульсов имеет многодекадное исполнение . В блоке 3 управления указана только часть элементов, необходимая для осуществления техничес.кого решения. Остальные элементы, например,управляющие движением элект ропривода в обратном направлении и переходом на медленную скорость, условно не показаны. Устройство работает следующим образом. Перед началом работы кнопкой 7 Сброс а блока 3 управления счетчи 2 импульсов и реверсивный счетчик 16 по входам R устанавливаются в ну левое состояние. При этом блоки 20 и 19 в работу не включаются, так ка нулевой выход дешифратора 17 на них не выведен. Число, определяющее величину перемещения исполнительного оргйна (не показан) системы, с блока 1 ввода программы вводится параллельным кодом в соответствующие декады счетчика 2. С блока 3 управления кнопкой 8 Пуск через триггер 5 и релейный элемент 6 вклю чается электропривод 9, двигатель к торого приводит в движение исполнительный орган и связаиньш с нян .им74пульсный преобразователь 10 перемещение-частота. Импульсы унитарного кода с его выхода поступают на одну из входных шин блока 15 сравнения частот и через переключатель 13 - на счетньй (вычитающий) вход счетчика 2 импульсов. Одновременно с выхода датчика 11 скорости (тахогенератора) напряжение постоянного тока, поступающее в электропривод 9 в качестве обратной связи по..скорости, преобразуется преобразователем 12 напряжение-частота в пропорциональH:,TO скорости движения частоту импульсов, которая поступает на другую входную пшну блока 15 сравнения частот. Если частоты импул сов с преобразователя 10 перемещение-частота и преобразователя 12 напряжение-частота , поступающих на входы сложения и вычитания реверсивного счетчика 16., равны (счетчик при этом необходимо применять такой, чтобы его работа не нарушалась при одновременном приходе импульсов на его счетные входы), то на блоках 20 и 19 периодически высвечивается цифра 1, т.е. счетчик 16 периодически через импульс возвращается в нулевое состояние (при практическом исполнении с целью исключения мерцания индикаторов цифры 1 блоков 20 и 19 последние можно не подключать к дешифратору i7). При этом запрещающего сигнала с блока 15 сравнения частот через переключатель 14 в блок 3 управления не поступает и движение объекта управления про- . исходит до, тех пор, пока импульсы, приходящие на счетньй вход счетчика 2 импульсов, не вычтут содержание счетчика 2 до нуля. I Сигнал кулевого состояния счетчика 2 импульсов, свидетельствующий о том, что объект управления системы пришел в заданн то позицию, поступает в блок 3 управления, где через элемент И-НЕ 4 переключает триггер, 5 и выключает релейный элемент 6 и электропривод 9, который останавливает движение объекта управления в заданной позиции. Если же импульсы с импульсного преобразователя 10 перемещение-частота из-за его неисправности поступают с перебоями или отсутствуют, то частоты двух импульсных последовательностей, поступающих на входы блока 15, неравны.
Если частота f первой последовательности импульсов больше частоты л второй, то в реверсивном счетчике 16 накапливается число в последовательности 1, 2, 3 и т.д. Это число через дешифратор 17 индицируется в блоке 20, показывая, на сколько импульсов первая последовательность превьшает вторую.
Если же частота f второй последовательности импульсов больше частоты fi первой, то реверсивный счетчик 16 работает на вычитание, т.е. число, равное максимальной емкости счетчика 16, уменьшается в последовательности К, К -1, kи т.д. Это число через дешифратор 18 индицируется в блоке 19, который подключен к дешифратору 17 в обратной последовательности, т.е. выход X дешифратора 17 соединен с цифрой 1 блока 19, выход к-1 с цифрой 2, выход К-2 - с цифрой и т.д.
Сигнал неравенства частот с выхода блока 15 сравнения частот через переключатель 14 поступает в блок 3 управления, где через элемент И-НЕ 4, триггер 5 и релейный элемент 6 запрещает дальнейшую работу электропривода 9.
1242576
С помощью переключателя 14 с выходов блока 15 сравнения можно выбирать различную допускаемую величину погрешности позиционирова5 ния, т.е. останавливать электропривод при превьшгении этой величины. Так, при применений дешифратора 17 можно сделать шесть выводов со значениями допуска в импульсах (2, 3.
10 4, 5, 6, 7).
Таким образом, в предлагаемом устройстве появилась возможность использовать второй канал обратной связи (например, канал с преобразо15 вателем 12 напряжение-частота) не только для контроля работоспособности первого канала (канала с преобразователем 10), но и как рабочий канал при выходе из строя первого
20 канала. Кроме того, применение блока 15 сравнения частот по предлагаемой схеме в процессе эксплуатации исключает необходимость использования дополнительных измерительных
25 приборов для проверки и калибровки преобразователя напряжение-частота; блок 15 можно использовать также для измерения величины люфта между двигателем и исполнительньм органом
30 в случае, если импульсный преобразователь (датчик) непосредственно связан с объектом управления устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для моделирования выбросов и размахов напряжения с монотонным изменением параметров | 1982 |
|
SU1064439A1 |
| Лотовый уровнемер | 1986 |
|
SU1381338A1 |
| Устройство для регулирования расхода жидкости | 1989 |
|
SU1707602A1 |
| Устройство для управления перемещением портала | 1985 |
|
SU1257615A1 |
| Номеронабиратель | 1990 |
|
SU1728977A1 |
| Вентильный электропривод | 1985 |
|
SU1356171A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО УПРАВЛЕНИЯ, содержащее блок ввода программы, подключенный выходами к соответствующим установочным входам счетчика импульсов, блок управления, содержащий элемент И-НЕ, подключен;ный первым входом к нулевому выходу счётчика импульсов, a выходом - к. нулевому входу триггера, соединенного инверсным выходом через релейный элемент с информационным входом электропривода, механически связанного с датчиком скорости, включенным в цепь обратной связи по скорости электропривода. преобразователь напряжение-частота, подключенный входом .к выходу датчика скорости, отличающееся тем, что, с целью повышения надежности устройства, в него введены преобразователь пере-ч мещение-частота, первый и второй переключатели, реверсивный счетчик импульсов, дешифратор, группа элементов ИЛИ, подключенных выходами через первый переключатель к второму входу элемента И-НЕ, a первым и вторым входами - к соответствующим выходам дещифратора, соединенного входами с выходами реверсивного счетчика импульсов, подключенного вычитающим и суммирующим входами через второй переключатель к счетному входу счетчика импульсов и к выходам соответственно преобразователя напсл ряжение-частота и преобразователя перемещение-частота, механически связанного с электроприводом, причем сбросовые выхода счетчика импульсов и реверсивного счетчика импуль. сов подключены через первую кнопку к шине нулевого потенциала и к перY 9 вому выводу второй кнопки, соеди.4 Is9 СП ненной вторым выводом с единичным входом триггера.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для программного управления приводом координатного стола станка | 1975 |
|
SU631874A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Число-импульсная система программного управления | 1971 |
|
SU525058A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| . | |||
