11
Изобретение относится к приводам производственных механизмов и устройств, приводные двигатели которых должны вращаться с одинаковой скоростью .
Целью изобретения является повьппе- ние точности синхронизации.
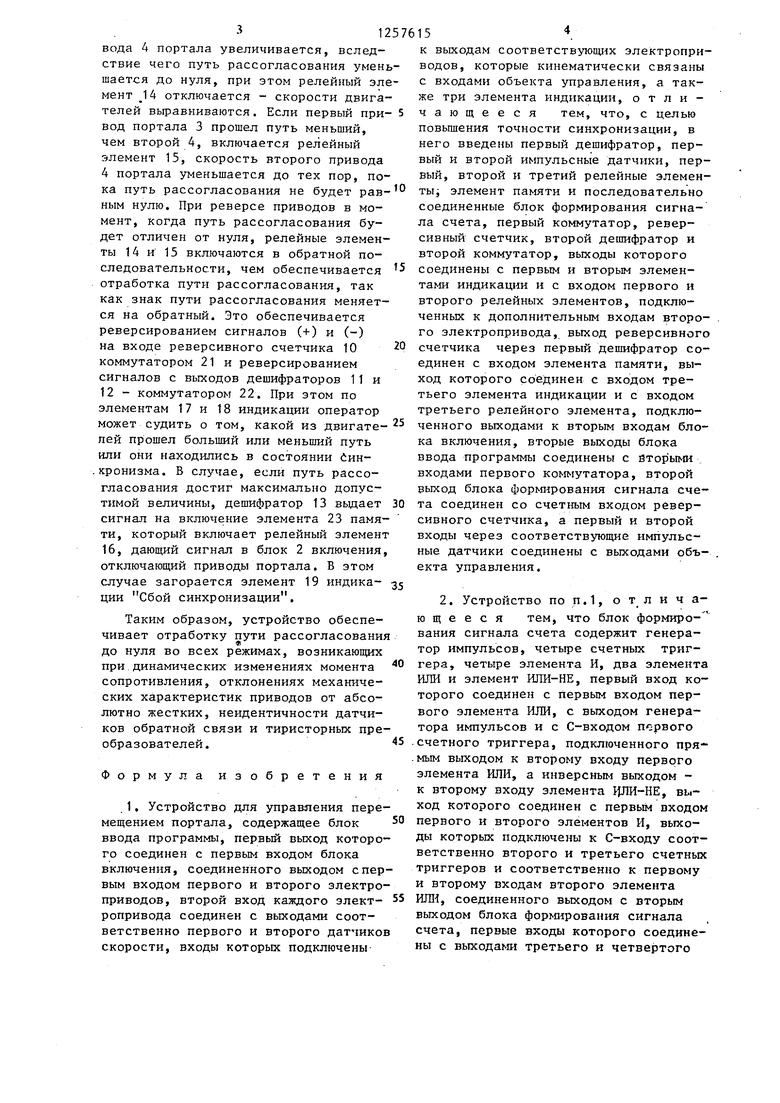
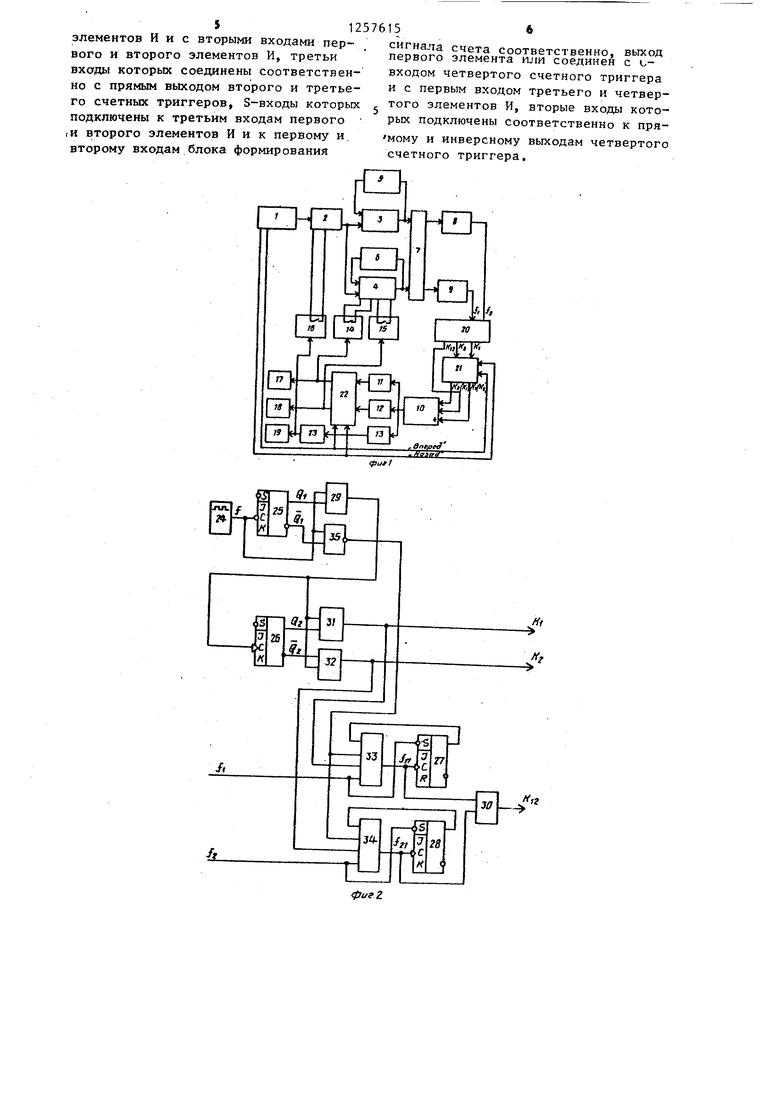
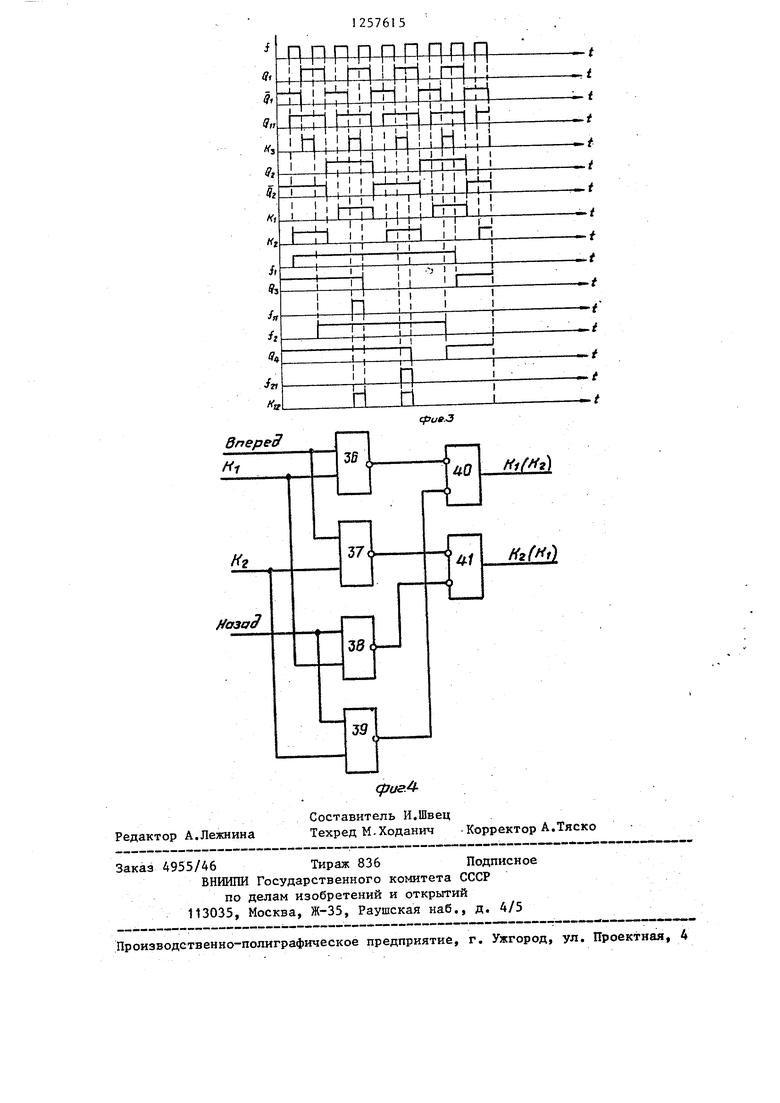
На фиг.1 показана структурная схема предлагаемого устройства; на фиг.2 функциональная схема блока формирова- ния сигналов счета; на фиг.З - вре- менные диаграммы работы блока формирования сигналов счета , на фиг.А -. функциональная схема блока реверсирования сигналов.
Устройство содержит блок 1 ввода программы, блок 2 включения, первый 3 и второй 4 электроприводы, первый 5 и второй 6 датчики скорости, портал первый 8 и второй 9 импульсные датчи- ки, реверсивный счетчик 10, три дешифратора 11-13, три релейных элемента 14-16, три элемента 17-19 индикации, блок 20 формирования сигналов счета, коммутаторы 21 и 22 и элемент 23 памяти.
Блок 20 формирования сигналов счета (фиг.2) состоит из генератора 24 импульсов, счетных триггеров 25-28, элементов ИЛИ 29 и 30, элементов И 31 и 34 и элемента ИЖ-НЕ 35.
Коммутатор 21 (22) (фиг.4) содержит элементы И-НЕ 36-39 и элементы НЕ-ИЛИ 40 и 41.
Устройство работает следующим об- разом.
При задании задающего напряжения а аналоговой форме, величина и знак которого определяют величину и направления вращения двигателей портала в блоке 1 ввода программы, сигнал поступает в блок 2 включения, с выхода которого в виде задающего напряжения IL. подается на электроприводы 3 и 4.
Двигатели портала начинают разгонять- ся. Датчики 5 и 6 скорости связаны своими выходами с входами электроприводов 3 и 4 соответственно и позволяют расширить диапазон регулирования. Импульсы с датчиков 8 и 9 импульсов поступают на блок 20 формирования сигнала счета, где образуются три последовательности импульсов: К,, Kj и K,j . Последовательности импульсов К и Kj разнесены во времени друг отно- сительно друга и поступают в коммутатор 21, а с его выхода в зависимости от направления вращения на суммиру
0
К
0 5
0
152
ющий (+) и вычитающий (-) или наоборот на вычитающий (-) и суммирующий (+) вход,ы реверсивного счетчика 10. Последовательность импульсов К, поступает на счетный G-вход реверсивного счетчика 10. Причем в течение одного импульса с датчика 8 или 9 импульсов на счетный С-вход и на суммирующий (+) или вычитающий (-) входы реверсивного счетчика 10 проходит ровно один импульс, а импульсы на суммирующем и вычитающем входах счетчика 10 разнесены во времени, что необходимо для нормальной его работы. Число импульсов с датчиков 8 и 9 импульсов пропорционально пройденному пути первым 3 и вторым 4 приводами портала. В случае, если первый привод 3. прошел путь больший, чем второй привод 4, на счетный С-вход и суммирующий вход реверсивного счетчика 10 пройдет большее число импульсов, чем на счетный С-вход и на вычитающий вход счетчика 10, при одном направлении вращения и в обратной последовательности при другом направлении вращения. Б этом случае на выходе реверсивного счетчика 10 может образоваться код числа: при одном направлении вращения
1 6 S т;
при другом направлении вращения п S 1; S га; S п
где S - число, пропорциональное разности путей пройденных первым и вторым двигателями портала , . m - число, пропорциональное максимально допустимому пути рассогласованияi 1 - модуль счета счетчика, п 1 - т.
Дешифраторы 11-13 расшифровывают три указанных состояния кодов на выходе реверсивного счетчика 10. Выходы дешифраторов 11 и 12 подключены к коммутатору 22, который в зависимости от направления вращения выдает сигнал на включение релейных элементов 14 и 15. При включениии релейного элемента 14 вьщается сигнал на увеличение скорости электропривода 4, а при включении релейного элемента 15 - на-, уменьшение скорости. Таким образом , если первый привод 3 портала прошел путь больший, чем второй 4, включается релейный элемент 14, скорость при312576
вода 4 портала увеличивается, вследствие чего путь рассогласования уменьшается до нуля, при этом релейный элемент J4 отключается - скорости двигателей вьфавниваются. Если первый при- 5 вод портала 3 прошел путь меньший, чем второй 4, включается релейный элемент 15, скорость второго привода 4 портала уменьшается до тех пор, пока путь рассогласования не будет рав- ным нулю. При реверсе приводов в момент, когда путь рассогласования бует отличен от нуля, релейные элементы 14 и 15 включаются в обратной последовательности, чем обеспечивается 5 отработка пути рассогласования, так как знак пути рассогласования меняется на обратный. Это обеспечивается еверсированием сигналов (+) и (-) на входе реверсивного счетчика 10 0 коммутатором 21 и реверсированием игналов с выходов дешифраторов 11 и 12 - коммутатором 22. При этом по лементам 17 и 18 индикации оператор ожет судить о том, какой из двигате- ей прощал больший или меньший путь ли они находились в состоянии йин- кронизма. В случае, если путь рассогласования достиг максимально допустимой величины, дешифратор 13 вьщает 30 сигнал на включение элемента 23 памяти, который включает релейный элемент 16, дающий сигнал в блок 2 включения, отключающий приводы портала. В этом случае загорается элемент 19 индика- 35 ции Сбой синхронизации.
Таким образом, устройство обеспечивает отработку пути рассогласования до нуля во всех режимах, возникающих при динамических изменениях момента сопротивления, отклонениях механических характеристик приводов от абсолютно жестких, неидентичности датчиков обратной связи и тиристорных преобразователей.
Формула изобретения
1. Устройство для управления перемещением портала, содержащее блок 0 ввода программы, первый выход которого соединен с первым входом блока включения, соединенного выходом с первым входом первого и второго электроприводов, второй вход каждого элект- 55 ропривода соединен с выходами соответственно первого и второго датчиков скорости, входы которых подключены
154
к выходам соответствующих электроприводов, которые кинематически связаны с входами объекта управления, а также три элемента индикации, отличающееся тем, что, с целью повышения точности синхронизации, в него введены первый дешифратор, первый и второй импульсные датчики, первый, второй и третий релейные элементы; элемент памяти и последовательно соединенные блок формирования сигнала счета, первый коммутатор, реверсивный счетчик, второй дешифратор и второй коммутатор, выходы которого соединены с первым и вторым элементами индикации и с входом первого и второго релейных элементов, подключенных к дополнительным входам второго электропривода, выход реверсивного счетчика через первый дешифратор соединен с входом элемента памяти, выход которого соединен с входом третьего элемента индикации и с входом третьего релейного элемента, подключенного выходами к вторым входам блока включения, вторые выходы блока ввода программы соединены с йтор ыми входами первого коммутатора, второй выход блока формирования сигнала счета соединен со счетным входом реверсивного счетчика, а первый и второй входы через соответствующие импульсные датчики соединены с выходами объекта управления.
2. Устройство по П.1, отличающееся тем, что блок формиро- вания сигнала счета содержит генератор импульсов, четыре счетных триггера, четыре элемента И, два элемента ИЛИ и элемент ИЛИ-НЕ, первый вход которого соединен с первым входом первого элемента ИЛИ, с выходом генератора импульсов и с С-входом n jpBoro .счетного триггера, подключенного пря- .мым выходом к второму входу первого элемента ИЛИ, а инверсным выходом - к второму входу элемента ИЛИ-НЕ, выход которого соединен с первьи входом первого и второго элементов И, выходы которых подключены к С-входу соответственно второго и третьего счетных триггеров и соответственно к первому и второму входам второго элемента ИЛИ, соединенного выходом с вторым выходом блока форм1рования сигнала счета, первые входы которого соединены с выходами третьего и четвертого
элементов И и с вторыми входами первого и второго элементов И, третьи входы которых соединены соответственно с прямым выходом второго и третьего счетных триггеров, S-входы которьпс подключены к третьим входам первого ,и второго элементов И и к первому и второму входам блока формирования
сигнала счета соответственно, выход первого элемента пли соединен с i.входом четвертого счетного триггера и с первым входом третьего и четвертого элементов И, вторые входы которых подключены соответственно к пря- мому и инверсному выходам четвертого счетного триггера.
дпереЗ
HI
cfueJ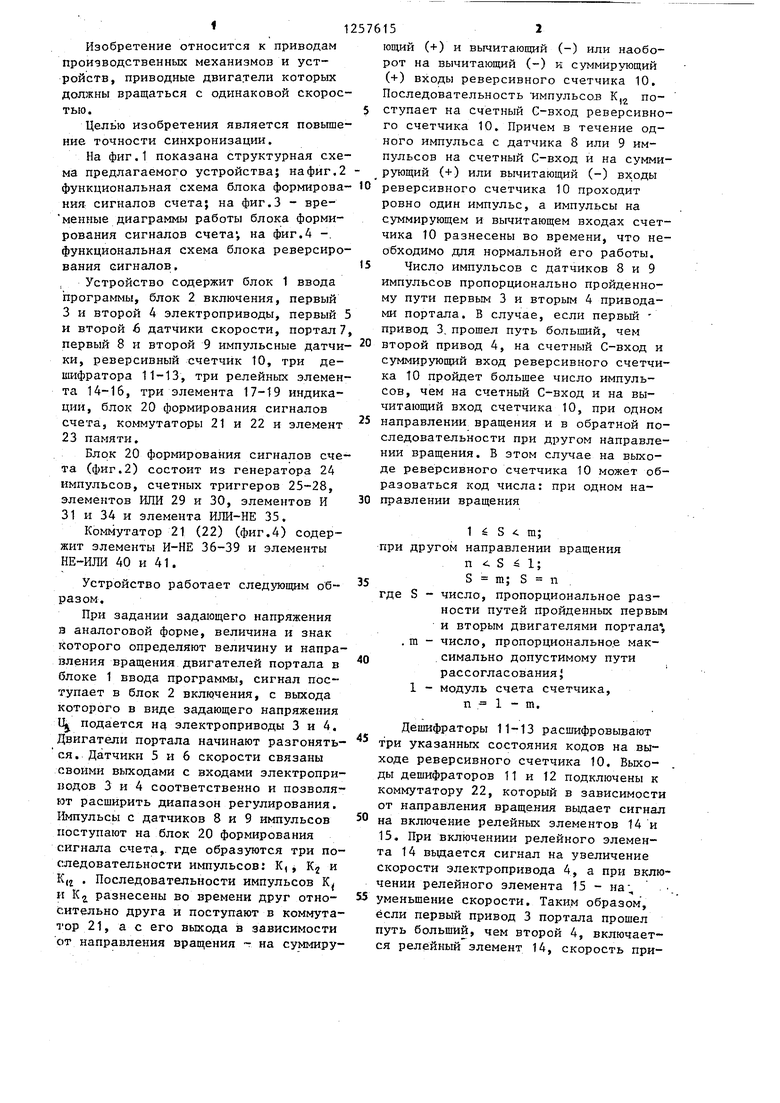
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционного управления | 1983 |
|
SU1124257A1 |
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ ОТКЛОНЕНИЙ ПАРАМЕТРОВ ПРИ ДОПУСКОВОМ КОНТРОЛЕ | 2016 |
|
RU2617982C1 |
| Номеронабиратель | 1990 |
|
SU1728977A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1330725A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Весоизмерительное устройство для грузов, подвешенных в захвате конвейера | 1991 |
|
SU1806331A3 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
Изобретение относится к приводам производственных механизмов и устройств, приводные двигатели которых должны вращаться с одинаковой скоростью. Цель изобретения - повьшение точности синхронизации. Устройство для управления синхронно перемещакяци- мися объектами содержит блок ввода программы, блок включения, два электропривода, два датчика скорости,портал, два импульсных датчика, реверсивный счетчик, три дешифратора, три релейных элемента и три элемента индикации, блок формирования сигналов счета, элемент памяти и два коммутатора. Данное устройство обеспечивает отработку.пути рассогласования до нуля во всех режимах, возникающих при динамических изменениях момента сопротивления, отклонениях механическихс. характеристик приводов от абсолютно жестких, неидентичности датчиков обратной связи и тиристорных преобразователей. 1 з.п. ф-лы, 4 ил. (Л СД GD
Кг
ЯазиЗ
Редактор А.Лежнина
дуигЛ
Составитель И.Швец
Техред М. Ходанич Корректор А.Тяско
Заказ 4955/46 Тираж 836 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Z7i
4Г
и
HifHj)
| Устройство для управления синхронно перемещающимися объектами | 1977 |
|
SU739477A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
