Изобретение относится к транспортной технике, в частности к системам,, осуществляющим оптимизацию по критериям минимального удельного расхода топлива и максимального тягового КПД режимов работы транспортного средства с бесступенчатой передачей, и может быть использовано в устройствах управления транспортными средствами.
Известна система автоматического управления (САУ) режимами работы транспортного средства, содержащая задатчик и датчик скорости соединенные с входами блока сравнения, один из выходов которого связан с исполнительным механизмом управления регулирующим органом передачи, а другой соединен с одним из входов блока формирования команд управления, связанного одним из выходов с исполнительным механизмом управления рейкой топливного насоса, датчики расхода топлива, крутящего момента двигателя и оборотов коленчатого вала, оптимизатор, первый блок умножения, управляемые ключи, причем датчик оборотов коленчатого вала соединен одним и другим выходами соответственно с вторым входом блока формирования команд управления и одним из входов первого блока умножения, другой вхОд которого соединен с датчиком крутящего момента двигателя, а выход - с одним из входом оптимизатора, второй вход которого соединен с датчиком расхода топлива, а выход - с сигнальным входом одного из ключей, выход которого соединен с исполнительным механизмом управления рейкой топливного насоса, а управляющий вход - с первым выходом блока формирования команд управления, второй, третий и четвертый выходы которого соединены соответственно с управляющими входами второго и третьего ключей и третьим входом первого блока умножения, выход второго ключа соединен с одним из входов исполнительного механизма управления регулирующим органом передачи, второй вход которого соединен с выходом третьего ключа, соединенного сигнальным входом с первым выходом блока сравнения, при этом третий вход блока формирования команд управления связан с регулирующим органом передачи 1.
Недостаток известной САУ заключается в том, что в процессе перехода с режима движения с постоянной скоростью при минимальном удельном расходе топлива на режим движения с постоянной мощностью двигателя в дальнейщем осуществляется поддержание такого значения мощности двигателя, которое наблюдалось на предыдущем режиме. При этом значительно снижается средняя скорость движения транспортного средства.,
Цель изобретения - повыщение средней скорости движения транспортного средства.
Поставленная цель достигается тем, что САУ режимами работы транспортного средства, содержащая задатчик и датчик скорости, соединенные с входа1у1и блока сравнения, один из выходов которого связан с исполнительным механизмом управления регулирующим органом передачи, а другой соединен с одним из входов блока формирования команд управления, связанного одним из выходов с исполнительным механизмом управления рейкой топливного насоса, датчики расхода топлива, крутящего момента двигателя и оборотов коленчатого вала, оптимизатор, первый блок умножения, управляемые ключи, причем датчик оборотов коленчатого вала соединен одним и другим выходами соответственно с вторым входом блока формирования команд управления и одним из входов первого блока умножения, другой вход которого соединен с датчиком крутящего момента двигателя, а выход - с одним из входов оптимизатора, второй вход которого соединен с датчиком расхода топлива, а выход - с сигнальным входом одного из ключей, выход которого соединен с исполнительным механизмом управления рейкой топливного насоса, а управляющий вход - с первым выходом блока формирования команд управления, второй, третий и четвертый выходы которого соединены соответственно с управляющими входами второго и третьего ключей и третьим входом первого блока умножения, выход второго ключа соединен с одним из входов исполнительного механизма управления регули.рующим органом передачи, второй вход которого соединен, с выходом третьего ключа, соединенного сигнальным входом с первым выходом блока сравнения, при этом третий вход блока формирования команд управления связан с регулирующим органом передачи, снабжена датчиком тягового усилия и, вторым блоком умножения, причем первый вход последнего соединен с выходом датчика скорости, а выход соединен с третьим входом оптимизатора, второй выход которого соединен с четвертым входом блока формирования команд управления,
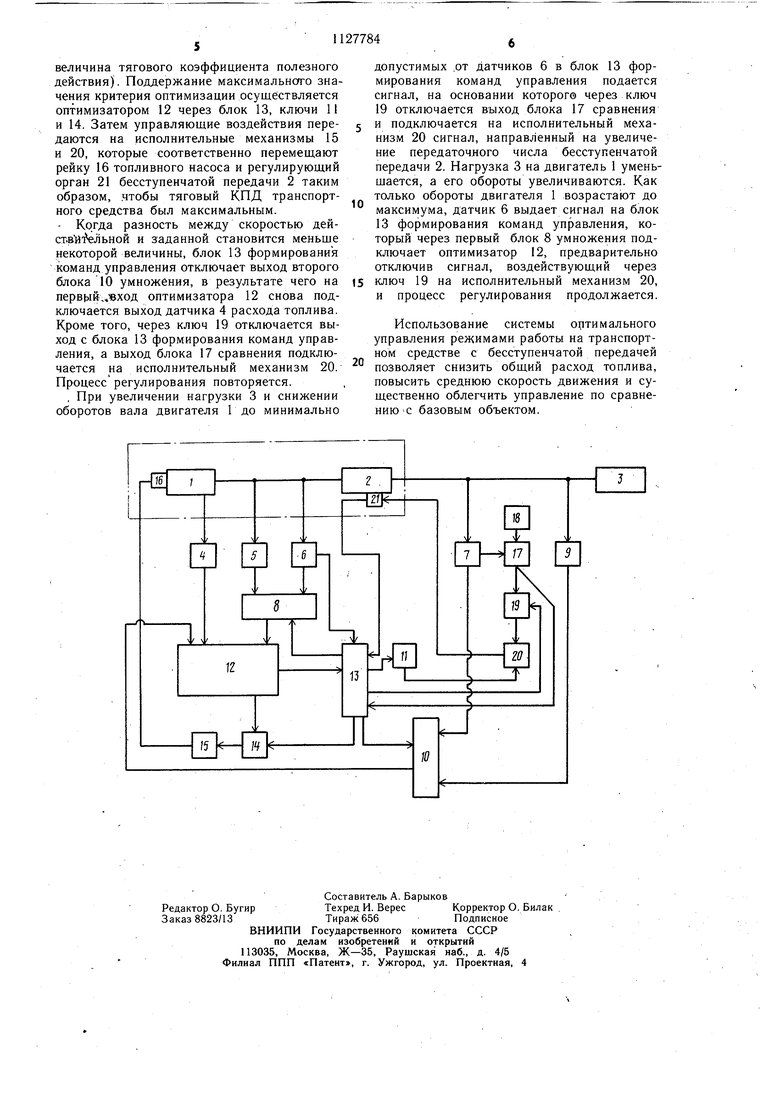
На чертеже представлена блок-схема объекта регулирования режимами работы транспортного средства.
Система содержит двигатель 1, бесступенчатую передачу 2, на которую действует нагрузка 3, датчик 4 расхода топлива, датчик 5 крутящего момента; датчик 6 оборотов коленчатого вала двигателя, датчик 7 скорости движения, первый блок 8 умножения, датчик 9 тягового усилия, второй блок 10 умножения, управляющий ключ 11, оптимизатор 12, блок 13 формирования команд
управления, управляемый ключ 14, исполнительный механизм 15 управления рейкой 16 топливного насоса, блок 17 сравнения, задатчик 18 скорости движения, управляемый ключ 19, исполнительный механизм 20 управления регулирующим органом 21 бесступенчатой передачи 2.
Выход датчика 4 соединен с одним из входов оптимизатора 12. Выходы датчиков 5 и 6, соединены с входами первого блока 8 умножения, один из выходов которого через ключ 14.соединен с исполнительным механизмом 15. Выход датчика 9 и дополнительный выход датчика 7 соединены с входами второго блока 10 умножения, выход которого соединен с третьим входом оптимизатора 12. Выход датчика 7 скорости движения соединен с одним из входов блока 17 сравнения, второй вход которого соединен с задатчиком 18 скорости движения. Один из выходов блока 13 формирования команд управления связан с первым блоком 8 умножения, другой - с управляющим входом ключа 11, третий - с управляющим входом ключа 19, через который первый выход блока 17 сравнения соединяется с вторым входом исполнительного механизма 20. Четвертый выход блока 13 связан с вторым блоком 10 умножения. Второй выход датчика 6 соединен с одним из входов блока 13 формирования команд, другой вход которого соединен с регулирующим органом 21 бесступенчатой передачи, 2, а третий вход - с вторым выходом блока 17 Сравнения. Выход исполнительного механизма 15 соединен с рейкой
16топливного насоса, а выход исполнительного механизма 20 связан с регулирующим органом .21 бесступенчатой передачи 2. Второй выход оптимизатора 12 соединен с четвертым входом блока 13 формирования команд управления.
Система оптимального управления режимами работы транспортного средства работает следующим образом.
Задатчиком 18 скорости движения устанавливается скоростной режим движения транспортного средства. Регулирующий орган 21 бесступенчатой передачи 2 при этом находится в нейтральном положении. Блок
17сравнения передает сигнал рассогласования на блок 13 формирования команд
.управления, который отключает оптимизатор 12 и через ключ 14 и исполнительный меха низм 15 воздействует на рейку 16 топливного насоса, увеличивая подачу топлива в цилиндры двигателя 1.
На вход блока 13 формирования команд управления, который может быть реализован на известных логических элементах И, ИЛИ и НЕ, подаются различные сочетаниявходных сигналов, в зависимости от которых на выходе получают однозначно определенные переключательные функции, обеспечивающие требуемую последовательность работы системы.
Когда обороты двигателя 1 достигают максимума от датчика 6 оборотов, который , представляет собой комбинированный датчик, на первом выходе которого формируется аналоговый сигнал, поступающий на вход блока 8 умножения для получения непрерывного текущего значения мощности двигателя 1, а на второй - дискретный сигнал,
соответствующий минимальным и максимальным оборотам двигателя, на вход блока 13 поступает сигнал. Он включает ключ 19 таким образом, что сигнал рассогласования с блока 17 сравнения поступает
5 на исполнительный механизм 20, который начинает- воздействовать на регулирующий орган 21 бесступенчатой передачи 2, уменьщая ее передаточное число.
Одновременно с подключением блока 17 сравнения к исполнительному механизму 20
0 по сигналу с блока 13 формирования команд управления происходит подключение выхода первого блока 8 умножения на вход оптимизатора 12, который через ключ 14 подключается на исполнительный механизм
5 15. Оптимизатор 12 представляет собой уст..ройство, формирующее критерий оптимизации (в данном случае удельный расход топлива) и обеспечивающее на выходе такое управляющее воздействие, которое минимизирует критерий оптимизации.
0 Транспортное средство начинает разгоняться до заданной задатчиком 18 скорости движения путем изменения передаточного числа бесступенчатой передачи 2, а оптимизатор12 для каждого значения передаточного числа бесступенчатой передачи 2 обеспечивает такую подачу топлива, чтобы его удельный расход был минимальным. Если заданная скорость движения превосходит действительную на определенную величину, а регулирующий орган 21 бес0 ступенчатой передачи 2 не находится в нейтральном положении, то происходит переход на режим поддержания максимального тягового КПД.
Блок 13 формирования команд управ5 ления посылает сигнал, на основании которого через ключ 19 отключается выход блока 17 сравнения на исполнительный мёха-низм 20 и оптимизатору 12 подключается выход второго блока 10 умножения.
На выходы второго блока 10 умножения
0 поступает сигнал от датчика 9 тягового усилия и от датчика 7 скорости движения. Таким образом, на выходе блока 10 получаем сигнал, пропорциональный тяговой мощности транспортного средства. Этот 5 сигнал отключает выход датчика 4 расхода топлива с первого входа оптимизатора 12, на выходе которого теперь формируется критерий оптимизации (в данном случае
величина тягового коэффициента полезного действия). Поддержание максимального значения критерия оптимизации осуществляется оптимизатором 12 через блок 13, ключи 11 и 14. Затем управляющие воздействия передаются на исполнительные механизмы 15 и 20, которые соответственно перемещают рейку 16 топливного насоса и регулирующий орган 21 бесступенчатой передачи 2 таким образом, чтобы тяговый КПД транспортного средства был максимальным. - Ко.гда разность между скоростью дейст.вйт ельной и заданной становится меньще некоторой величины, блок 13 формирования команд управления отключает выход второго блока 10 умножения, в результате чего на первый;,чэход оптимизатора 12 снова подключается выход датчика 4 расхода топлива. Кроме того, через ключ 19 отключается выход с блока 13 формирования команд управления, а выход блока 17 сравнения подключается на исполнительный механизм 20. Процесс регулирования повторяется.
, При увеличении нагрузки 3 и снижении оборотов вала двигателя 1 до минимально
допустимых ,от датчиков 6 в блок 13 формирования команд управления подается сигнал, на основании которого через ключ 19 отключается выход блока 17 сравнения и подключается на исполнительный механизм 20 сигнал, направленный на увеличение передаточного числа бесступенчатой передачи 2. Нагрузка 3 на двигатель 1 уменьщается, а его обороты увеличиваются. Как только обороты двигателя 1 возрастают до максимума, датчик 6 выдает сигнал на блок 13 формирования команд управления, который через первый блок 8 умножения подключает оптимизатор 12, предварительно отключив сигнал, воздействующий через ключ 19 на исполнительный механизм 20, и процесс регулирования продолжается.
Использование системы ортимального управления режимами работы на транспортном средстве с бесступенчатой передачей позволяет снизить общий расход топлива, повысить среднюю скорость движения и существенно облегчить управление по сравнению -с базовым объектом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления режимами работы транспортного средства | 1977 |
|
SU745727A1 |
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1115932A2 |
| Система автоматического управления режимами работы транспортного средства | 1981 |
|
SU958152A2 |
| Система автоматического управления режимами работы двигателя транспортного средства | 1990 |
|
SU1754506A1 |
| Система автоматического управления режимами работы транспортного средства | 1986 |
|
SU1382685A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182086C1 |
| Устройство для автоматического ре-гулиРОВАНия пОСТОяННОй СКОРОСТидВижЕНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823183A1 |
| Устройство управления буровым агрегатом | 1981 |
|
SU1086134A1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА, содержащая зздатчик- и датчик скорости, соединенные с входами блока сравнения, один из выходов которого связан с исполнительным механизмом управления регулирующим органом передачи, а другой соединен с одним из входов блока формирования команд управления, связанного одним из выходов с исполнительным механизмом управления рейкой топливного насоса, датчики расхода топлива, крутящего момента двигателя и оборотов коленчатого вала, оптимизатор, первый ,блок умножения, управляемые ключи, причем датчик оборотов коленчатого вала соединен одним и другим выходами соответственно с вторым входом блока формирова,ния команд управления и одним из входов первого блока умножения, другой вход которого соединен с датчиком крутящего момента двигателя, а выход - с одНИ.М из входов оптимизатора, второй вход которого соединен с датчиком расхода топлива, а выход - с сигнальным входом одного из ключей, выход которого соединен с исполнительным механизмом управления рейкой топливного насоса, а управляющий вход - с первым выходом блока формирования команд управления, второй, третий и четвертый выходы которого соединены соответственно с управляющими входами второго и третьего ключей и третьим входом первого блока умножения, выход второго ключа соединен с одним из входов исполнительного механизма управления регулирующим органом передачи, второй вход которого соединен с выходом третьего ключа, соединенного сигнальным входом с первым выходом блока с |авнения, при этом третий (Л вход блока формирования команд управления связан с регулирующим органом передачи, отличающаяся тем, что, с целью повышения средней скорости движения транспортного средства, она снабжена датчйТком тягового усилия и вторым блоком умножения, причем первый вход последнего соединен с выходом датчика тягового усилия, второй to вход -.с дополнительным выходом датчика скорости, а выход соединен с третьим входом оптимизатора, второй выход которого 00 соединен с четвертым входом блока форми рования команд управления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического управления режимами работы транспортного средства | 1977 |
|
SU745727A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
