(S) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА
1
Изобретение относится к тр нспортной технике, в частности к системам, осуществляющим оптимизацию по критерию минимального удельного расхода топлива режимов работы транспортного средства с бесступенчатой передачей, и может быть использовано в устройствах управления транспортными средствами.
По основному авт.св. № 745727 известна система автоматического управления режимами работы транспортного средства, содержащая задатчик и датчик скорости, соединенные с входами одного из блоков сравнения, один из выходов которого связан с исполнительным механизмом управления регулирующим органом передачи. Другой выход блока сравнения соединен с одним из входов блока формирования команд управления, связанного одним из выходов с исполнительным механизмом управления рейкой топливного насоса. Система также содержит датчики расхода топлива, крутящего, момента двигателя и оборотов коленчатого вала. Кроме того, она включает в себя.оптимизатор, блок умножения, управляемые ключи и задатчик мощности двигателя. Датчик оборотов коленчатого вала соединен одним и другим выходами соответственно с вторым входом бло-ка формирования команд управления и одним из входов блока умножения. Другой вход блока умножения соединен с датчиком крутящего момента двигателя, авыход - с одним из входов оптимизатора. Другой вхрд оптимизатора соединен с датчиком расхода
10 топлива, а выход - с сигнальным входом одного из ключей. Выход этого ключа соединен с исполнительным механизмом управления рейкой топливного насоса, а его управляющий вход 15с первым выходом блока формирования команд управления. Второй, третий и четвертый выходы блока формирования команд управления соединены соответственно с управляющими входами
20 второго и третьего ключей и третьим входом блока умножения. Второй выход блока умножения соединен с одним из входов другого блока сравнения, второй вход которого соединен с задатчиком мощ25ности двигателя, а выход - с сигнал -ным входом второго ключа. Выход второго ключа соединен с одним из входов исполнительного механизма управления регулирующим органом передачи,
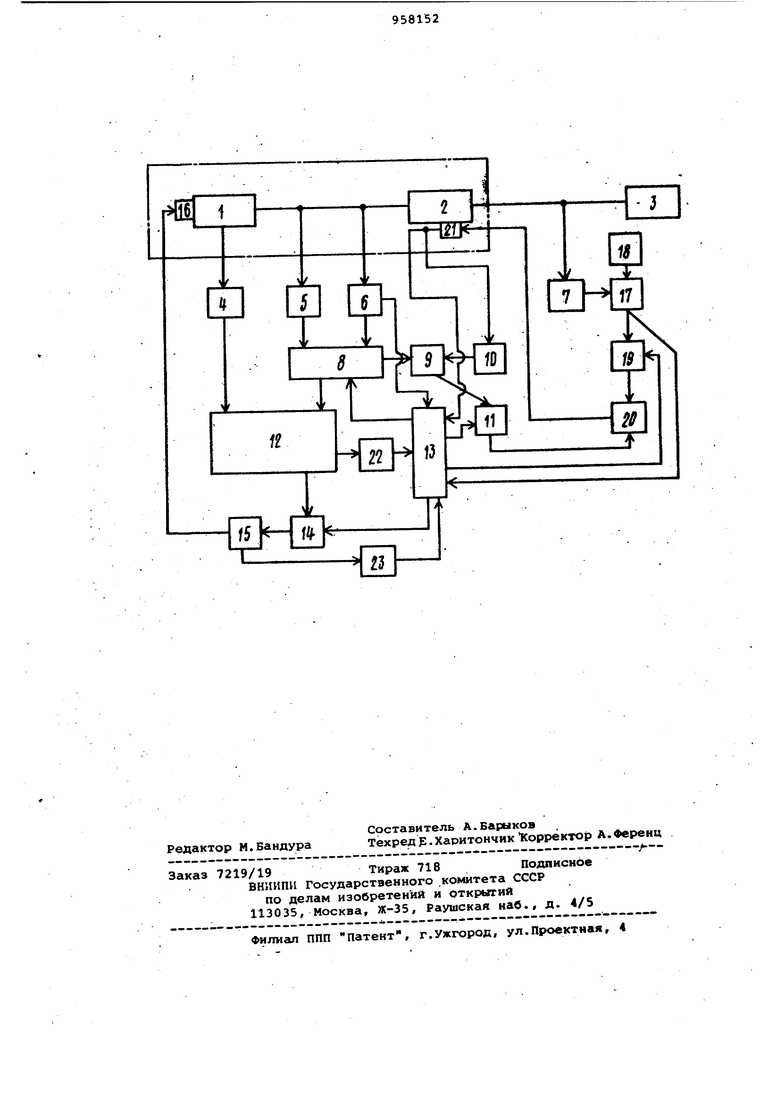
30 второй вход i oToporo соединен с выходом третьего ключа. Третий ключ соединен сигнальным входом с первым выходом первого блока сравнения. Вхо задатчика мощности двигателя и третий вход блока формирования команд управления связан с регулирующим органом передачи Cl. Недостаток известного изобретения заключается в том, что при выходе транспортного средства, на установив шийся режим движенТия оптимизатор про должает работать в режиме автоколебания, что объясняется процессом поиска экстремума в оптимизаторе. В этом случае подача топлива в цилиндр дригателя носит колебательный характер, что оказывает отрицательное влияние на качество смесеобразования и мощность двигателя. Скорость движе ния объекта в связи с этим меняется. Разность между действительной и заданной скоростями не превосходит некоторой величины, регулятор выполняет режим постоянной скорости движения. Однако запаздывание в системе поддержания .скорости движения транспортного средства приводит к тому, что с учетом постоянной времени двигателя изменение передаточного числа бесступенчатой Трансмиссии наступает в .тот момент, когда в процессе поиска экстремума сигнал на исполнительный механизм меняет знак на противоположный и увеличивает амплитуду колебаний скорости д.вижения транспортного средства. Кроме того, процесс работы оптимизатора в зоне экстремум затруднен в силу слабо выраженного экстремума в характеристике удельного расхода топлива. Поэтому увеличивается время поиска экстремума. Все это приводит к увеличению расхода топлива при установившемся движении транспортного средства. Целью изобретения является уменьшение расхода топлива при установившемся движении транспортного средства. Поставленная цель достигается тем что система автоматического управления режимами работы транспортного средства снабжена блоком определения знака приращения сигнала и блрком .определения направления перемещения исполнительного механизма управления рейкой топливного насоса, причем вхо блока определения знака приращения сигнала соединен с оптимизатором, а выход - с четвертым входом блока формирования команд, второй выход ис полнительного механизма управления рейкой топливного насоса соединен с входом блока определения направления перемещения исполнительного механизма управления рейкой топливного насо са, выход которого соединен с пятым входом блока формиройания команд, На чертеже представлена блок-схема объекта регулирования и систелы автоматического управления (САУ) режимами работ транспортного средства. Система содержит двигатель 1, бесступенчатую передачу 2, на которую действует нагрузка 3, датчик 4 расхода топлива, датчик 5 крутящего момента, датчик б оборотов коленчатого вала двигателя, датчик 7 скорости движения, блок 8 умножения, блок 9 сравнения, задатчик 10 мощности двигателя, управляющий ключ 11, оптиг шзатор 12, блок 13 формирования команд управления, управляемый ключ 14, исполнительный механизм 15 управления рейкой 16 топливного насоса, блок 17 сравнения, задатчик 18 скоро.сти двияения, управляекий ключ 19, исполнигтельный механизм 20 управления регулирующим органом 21 бесступенчатой передачи 2, блок 22 определения знака приращения сигнала и блок 23 определения направления перемещения исполнительного механизма управления рейкой топливного насоса. Выход датчика 4 соединен с одним из входов оптимизатора 12. Выходы датчиков 5 и б соединены с входами блока 8 умножения, один из выходов которого соединен с вторым вЗсодом оптимизатора 12, выход которого через ключ 14 соединен с исполнительным механизмом 15. Второй выход блока 8 умножения соединен с одним из входов блока 9 сравнения, второй вход которого соединен с задатчиком 10 мощности двигателя. Выход этого блока сравнения соединен с сигнальным входом ключа 11, выход которого соединен с одним из входов исполнительного механизма 20. Выход датчика 7 скорости движения соединен с одним из входов блока 17 сравнения, второй вход которого соединен с задатчиком 18 скорости движения. Одни из выходов блока 13 формирования команд управления связан с блоком 8 умножения, другой - с управляющим входом ключа 11, третий с Управляющим входом ключа 19, через который первый шлход блока 17 сравнения соединяется с вторым входом исполнительного .механизма 20. Четвертый выход блока 13 связан с управляющим входом ключа 14. Второй выход датчика б соединен с одним из входов блока 13 формирования команд, другой вход ко орого соединен с регулирующим органом 21 бесступенчатой передачи 2, а третий вход - со вторым выходом блока 17 сравнения. Выход исполнительного механизма 15 соединен с рейкой 16 топливного насоса, а выход исполнительного механизма 20 связан с регулирующим органом 21 бесступенчатой передачи 2, второй выход которого связан с входом задатчика 10 мощности двигателя. В отличие от основного
изобретения вход блока 22 соединен с оптимизатором 12, а выход - с четвертым входом блока 13 формирования команд; Выход исполнительного механизма 15 управления рейкой 16 топливного насоса соединен с входом блогка 23, выход которого соединен с пятым входом блока 13 формирования команд управления.
САУ режимами работы транспортного средства работает еледунхцим образом.
Задатчиком 18 скорости движения устанавливается скоростной режим движения транспортного средства. Регулирующий орган 21 бесступенчатой передачи 2 при этом находится в нейтральном положении. Блок 17 сравнения передает сигнал рассогласования на блок 13 формирования команд управления, который отключает оптимизатор 12 и через ключ 14 и исполнительный механизм 15 воздействует на рейку 16 топливного насоса, увеличивая подачу топлива в Цилиндры двигателя 1 .
V На вход блока 13 формирования команд управления, который может быть реализован на известных логических элементах И, ИЛИ, Не подаются различные сочетания входных сигналов в зависимости от-которых на выходе получаются однозначные определенные переключательные функции, обеспечивающие требуемую последовательность работы системы.
Когда обороты двигателя 1 достигают максимума от датчика 6 оборотов, который представляет -собой комбинированный датчик, на первом выходе которого формируется аналоговый сигнал, поступсцощий на вход блока 8 умножения для полученияя непрерывного текущего значения мощности двигателя 1, а на втором - дискретный сигнал, соответствующий минимальным и максимальным оборотам двигателя, на вход блока 13 поступает сигнал. Он включает ключ 19 таким образом, что сигнал рассогласования с блока 17 сравнения поступает на исполнительны механизм 20, который начинает воздействовать на регулирующий орган 21 бесступенчатой передачи 2, уменьшая ее передаточное число.
Одновременно с подключеним блока 17 сравнения к исполнительному механизму 20 по сигналу с блока 13 формирования команд управления происходит подключение выхода,блока 8 умножения на вход оптимизатора 12, который через ключ 14 подключается pia исполнительный механизм 15. Оптимизатор 12 представляет собой устройство, формирующее критерии оптимизации .. (в данном случае удельный расход топлива) и обеспечивающее на выходе такое управляющее воздействие, которое минимизирует критерий оптимизации. Транспортное средство начинает разгоняться до .заданной задатчиком 18 скорости движения путем изменения передаточного числа бесступенчатой передачи 2, а оптимизатор 12 для каждого значения передаточного числа бесступенчатой передачи 2 обеспечивает такую подачу топлива,, чтобы удельный его расход
0 был Минимальным. В отличие от основ- ного изобретения сигнал от оптимизатора 12 поступает также в блок 2.2, где определяется знак приращения сигнала при движении определяющей точ5ки по кривой удельного расхода топлива. При каждом переходе изобража1рщей точки через экстремум, исполнительный механизм 15 выдает соответствующие управления рейке 16 топливного насоса, и при помощи блока 23, определяющего направление перемещения исполнительного механизма 15, передает кодированные сигнашы знакопеременного вида, которые поступают на пятый вход блока 13 формирования
5 команд управления. Так как начгшом установившегося движения системы считают состояние, когда изображающая точка хотя бы один раз перешла через экстремум плавающей характе0ристики удельного расхода топлива и вернулась на исходную наклонную ветвь, то окончание установившегося движения и начало переходного процесса определяются постоянной време5ни двигателя. В этом случае изображаиощая точка не пересекает экстремума на характеристике удельного расхода топлива, несмотря на соответствующее перемещение исполнительного механизма 15 управления рейкоИ 16
0 топливного насоса. Сигналы от блоков 22 и 23 направляются в блок 13 формирования команд, где, при условии выполнения режима движения с постоянной скоростью и условия нахождения
5 агрегата в установившемся режиме, вырабатывается сигнсш, который отключает выход блока 17 сравнения от одного входа управляемого ключа 19. Одновременно блок 13 формирования команд кл0дает на вход управляемого ключа 19 сигнал, при котором уменьшению или увеличению подачи топлива соответствует увеличение или уменьшение передаточного числа бесступенчатой пере5дачи 2. Это приводит к более выраженному положению экстремума и в целом уменьшает время его поиска. Колебания скорости движения транспортного средства уменьшаются до минимума.
0
В слу1ае окончания установившегося движения, переходной процесс в системе продолжается в пределах движения на заданном режиме.
Если заданная скорость движения
5 превосходит действительную на определенную величину, а регулирунхдий орган 21 бесступенчатой передачи не находится в нейтральном положении, то ПРОИСХОДИТ переход на режиме поддержания постоянной мощности двигателя.
Блок 13 формирования команд управления посылает сигнал, на основании которого через ключ 19 отключается выход блока 17 сравнения на исполнительный механизм 20.
На входы блока 9 сравнения поступают сигналы от блока 8 умножения и задатчика 10 мощности двигателя, связанного с регулирующим органом 21 бесступенчатой передачи 2. Одновременно с отключением выхода блока 17 сравнения на исполнительный механизм 20 через ключ 11 -поступает сигнал рассогласования текущего и задаваемого значения,мощности двигателя который, воздействуя на регулирующий орган 21, yBeJjH4HBaeT передаточное число бесступенчатой передачи 2 таким образом, чтобы мощность двигателя 1 оставалась постоянной. При этом для каждого значения передаточного числа оптимизатор 12 обеспечивает; такую передачу топлива, чтобы его удельный расход был минимальным.
Когда разность между скоростью действительной и заданной .стает , меньше некоторой величины, блок 13 формирования команд управления через ключ 11 отключает выход блока 9 сравнения и подключает на исполнительный механизм 20 через ключ 19 выход блока 17 сравнения. Затем процесс регулирования повторяется.
При увеличении нагрузки 3 и снижении оборотов двигателя 1 до минимально допустимых от датчиков б в блок 13 формирования команд управления подается сигнал, на основании которого через блок 8 умножения отключается оптимизатор 12, а через ключ 19 отключается выход блока 17 сравнения и подключается на исполнительный механизм 20 сигнал, направляемый на увеличение передаточного числа бесступенчатой передачи 2. Нагрузка 3 на двигатель 1 уменьшается, а его обороты увеличивёцотся. Как только обороты двигателя 1 возрастают до максимума, датчик 6 выдает сигнал на блок 13 формирования команд управления, который через блок 8 умножения подключает оптимизатор 12, предварительно отключив cffrнал, воздействовавший через ключ 19 на исполнительный механизм 20, и процесс регулирования продолжается.
Использование системы режимами работы на транспортном средстве с
бесступенчатой передачей позволяет
снизить общий расход топлива и существенно облегчить управление транспортными средствами.
Формула изобретения
Система автоматического управления режимами работы транспортного средства по авт.св. № 745727, о тличающаяся тем, что, с целью уменьшения расхода топлива при установившемся движении транспортного средства, она снабхсена блоком определения знака приращения сигнала и блоком определения направления перемещения исполнительного механизма . упргшления р ейкой топливного насоса. Причем вход блока определения знака приращения сигнала соединен с оптимизатором, а выход - с четвертым входом блока, формирования команд, второй выход исполнительного механизма управления рейкой топливного насоса соединен с входом блока определения направления перемещения исполнитель0 него.механизма управления рейкой топливного насоса, выход которого соединен с пятым входом блока формирования команд.
Источники информации,
с принятые во внимание при экспертизе
1. Авторское свидетельство СССР 745727, кл. В 60 К 41/04, 1977.



| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления режимами работы транспортного средства | 1977 |
|
SU745727A1 |
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1127784A1 |
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1115932A2 |
| Система автоматического управления режимами работы двигателя транспортного средства | 1990 |
|
SU1754506A1 |
| Система автоматического управления режимами работы транспортного средства | 1986 |
|
SU1382685A1 |
| Устройство для автоматического регулирования режима работы транспортного средства | 1977 |
|
SU743902A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Устройство для автоматического регулирования нагрузки двигателя транспортного средства | 1980 |
|
SU880804A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182086C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ИЗМЕНЯЕМЫМ ЧИСЛОМ РАБОТАЮЩИХ ЦИЛИНДРОВ | 1992 |
|
RU2032824C1 |