воздействуя на механизм включения глав ного сцепления и уменьшения скорости его включения. При этом уменьшается амплитуда вынужденных колебаний за счет корректировки скорости изменения момента на входном и выходном валах и, тем самым, увеличивается датговечность трансмиссии.
6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1115932A2 |
| Система автоматического управления режимами работы транспортного средства | 1977 |
|
SU745727A1 |
| Система автоматического управления режимами работы транспортного средства | 1981 |
|
SU958152A2 |
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1127784A1 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| Система автоматического управления механической трансмиссией транспортного средства | 1987 |
|
SU1495154A1 |
| АДАПТИВНАЯ ТРАНСМИССИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2440524C1 |
| Система автоматического управления режимами работы двигателя транспортного средства | 1990 |
|
SU1754506A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2604003C2 |
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2651388C1 |
Изобретение относится к транспортной технике, в частности к системам, осуществляющим оптимизацию по критерию минимального удельного расхода топлива режимов работы транспортного средства, и может быть использовано в устройствах управления транспортными средствами. Пелью изобретения является повыщение эффективности путем улучшения процесса разгона при снижении уровня динамической нагруженности в трансмиссии. Система содержит двигатель 1, трансмиссию 2, на которую действует внещняя нагрузка 3, датчик расхода топлива 4, датчик крутящего момента 5, датчик 6 оборотов коленчатого вала двигателя, датчик скорости движения 7, блок умножения 8, блок сравнения 9, задатчик 10 мощности двигателя, управляющий ключ 11, оптимизатор 12, блок формирования команд управления 13, управляемый ключ 14, исполнительный механизм 15 управления рейкой 16 топливного насоса, блок сравнения 17, задатчик скорости движения 18, управляемый ключ 19, исполнительный механизм 20 управления регулирующим органом 21 трансмиссии 2, блок управления разгоном 22, исполнительные механизмы разгона 23 и 24, дифференциальные звенья 25 и 26, блок 27 определения скорости изменения крутящего момента двигателя, датчик 28 крутящего момента на выходном валу трансмиссии, блок определения скорости изменения крутящего момента 29, блок сравнения 30. Измеряя величины крутящего момента на ведущем валу трансмиссии и на ее выходном валу, определяют скорости изменения крутящих моментов и из скорости изменения момента на ведущем валу вычитают скорость изменения момента на выходном валу трансмиссии. Если результат вычитания положительный, увеличивают скорость разгона транспортного средства, если отрицательный - уменьшают скорость разгона пропорционально величине превышения. (Л со 00 ю О5 00 ел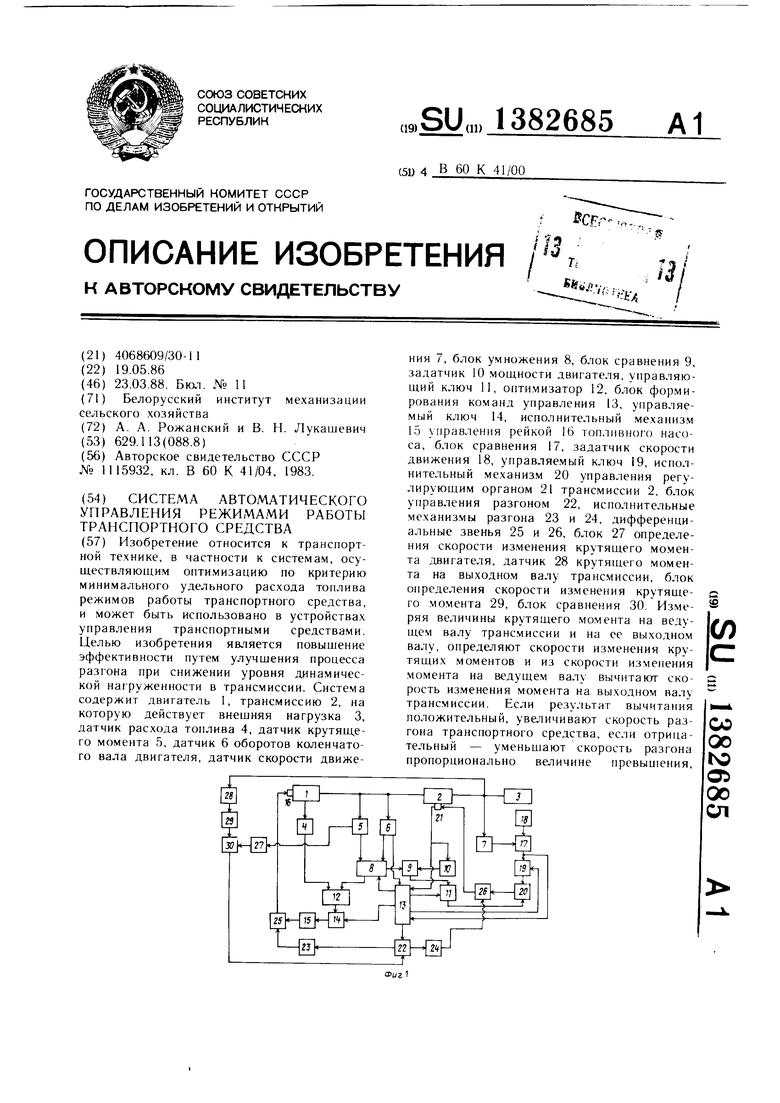
Изобретение относится к транспортной технике, в частности к системам, осущест- вляюшим оптимизацию но критерию минимального удельного расхода топлива режимов работы транспортного средства, и мо- жет быть использовано в устройствах управления транспортными средствами.
Целью изобретения является повышение эффективности путем улучн ения процесса разгона при снижении уровня динамической нагруженности в трансмиссии.
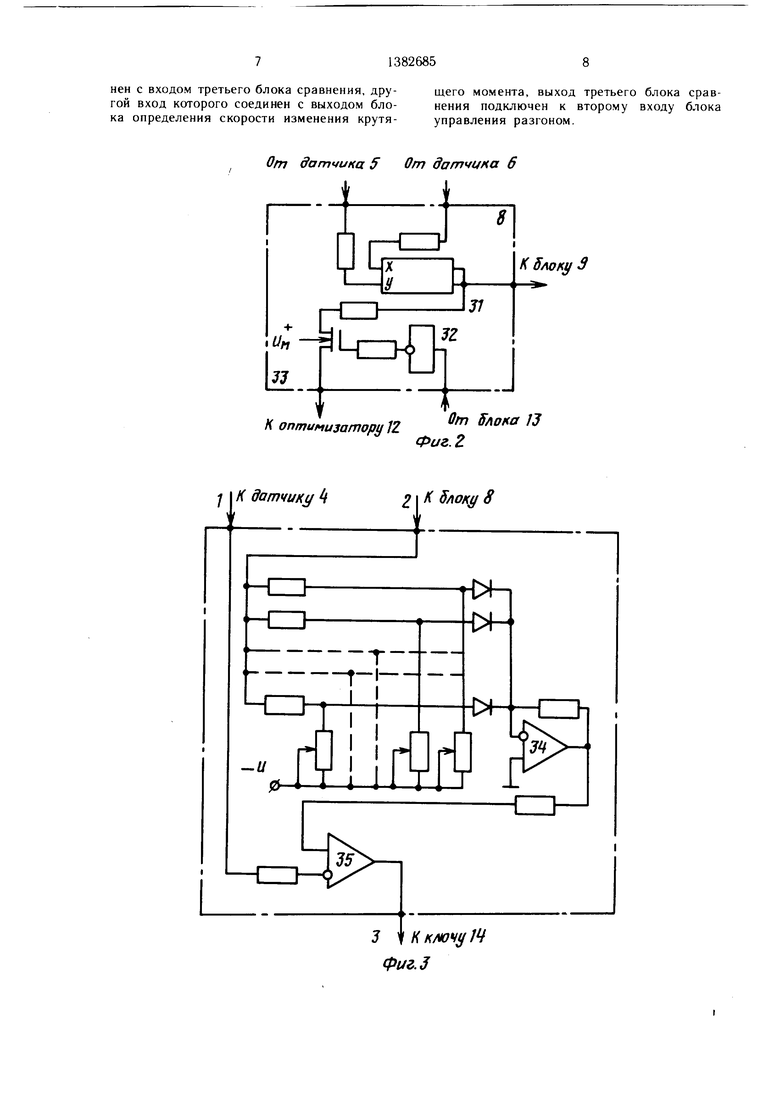
На фиг. 1 представлена блок-схема объекта регулирования и системы автоматического управления (САУ) режимами работы транспортного средства; на фиг. 2 - устройство блока умножения; на фиг. 3 - устройство оптимизатора; на фиг. 4 - устройство блока формирования команд управления; на фиг. 5 - устройство блока управления разгоном; на фиг. 6 -- устройство дифференциальных звеньев.
Система содержит двигатель I, трансмиссию 2, на которую действует внешняя нагрузка 3, датчик 4 расхода топлива, датчик 5 крутяшего момента, датчик 6 оборотов коленчатого вала двигателя, датчик 7 скорости движения, блок 8 умножения, блок 9 сравнения, задатчик 10 мощности двигателя, управляющий ключ 11, опти.ми- затор 12, блок 13 формирования команд управления, управляемый ключ 14, исполнительный механизм 15 управления рейкой 16 топливного насоса, блок 17 сравнения, задатчик 18 скорости движения, управляемый ключ 19, исполнительный механизм 20 управ-1ения регулирующим органом 21 трансмиссии 2, блок 22 управления разгоном, исполнительные механизмы 23 и 24 разгона, дифференциальные звенья 25 и 26, блок 27 определения скорости изменения крутящего момента двигателя, датчик 28 крутящего момента на выходном валу трансмиссии, блок 29 определения скорости изменения крутящего момента, блок 30 сравнения.
Выход датчика 4 соединен с одним из входов оптимизатора 12, выходы датчиков 5 и 6 соединены с входами блока 8 умножения, один из выходов которого соединен с вторы.м входом оптимизатора 12, выход которого через ключ 14 соединен с испол
5
0
О 5
5
5
0
нительным механизмом 15. Второй выход блока 8 умножения соединен с одним из входов блока 9 сравнения, второй вход которого соединен с задатчиком 10 мощности двигателя. Выход блока 9 сравнения соединен с одним из входов исполнительного механизма 20. Выход датчика 7 скорости движения соединен с одним из входов блока 17 сравнения, второй вход которого соединен с задатчиком 18 скорости движения. Один из выходов блока 13 формирования команд управления связан с блоком 8 умножения, другой - с управляющим входом ключа 11, третий - с управляющим входом ключа 19, через который первый выход блока 17 сравнения соединяется с вторым входом исполнительного механизма 20. Четвертый выход блока 13 связан с управляющим входом ключа 14. Второй выход датчика 6 соединен с одним из входов блока 13 формирования команд управления, другой вход которого соединен с регулирующим орга)юм 21, а третий вход - с вторым выходом блока 17 сравнения. Первый вход блока 22 управления разгоном соединен с пятым выходом блока 13, а выходы соединены с входами исполнительных механизмов 23 и 24 разгона. Выход исполнительного механизма 23 соединен с одним из входов дифференциального звена 25, другой вход которого соединен с исполнительным механизмом 15. Выход исполнительного механизма 24 соединен с одним из входов дифференщ1ального звена 26, другой вход которого соединен с исполнительным механизмом 20. Выход дифференциального звена 25 соединен с рейкой 16 топливного насоса. Выход дифференциального звена 26 соединен с регулирующим органом 21 трансмиссии 2.
Дополнительный выход датчика 5 соединен с выходом блока 27 определения скорости изменения крутящего момента двигателя, выход которого подключен к первому входу блока 30 сравнения. Второй вход блока 30 соединен с выходом блока 29 определения скорости изменения крутящего момента на выходном валу, вход которого соединен с выходом датчика 28 крутящего момента, установленного на выходном валу трансмиссии. Выход блока 30 сравнения
подключен к второму входу блока 22 управления разгоном.
Блок 8 умножения (фиг. 2) содержит аналоговый полупроводниковый перемножитель 31 напряжений, логический элемент НЕ 32, ключ на транзисторе 33.
Оптимизатор (фиг. 3) содержит аппрок- симатор, выполненный на интегральном операционном усилителе 34, и однопороговый компаратор 35.
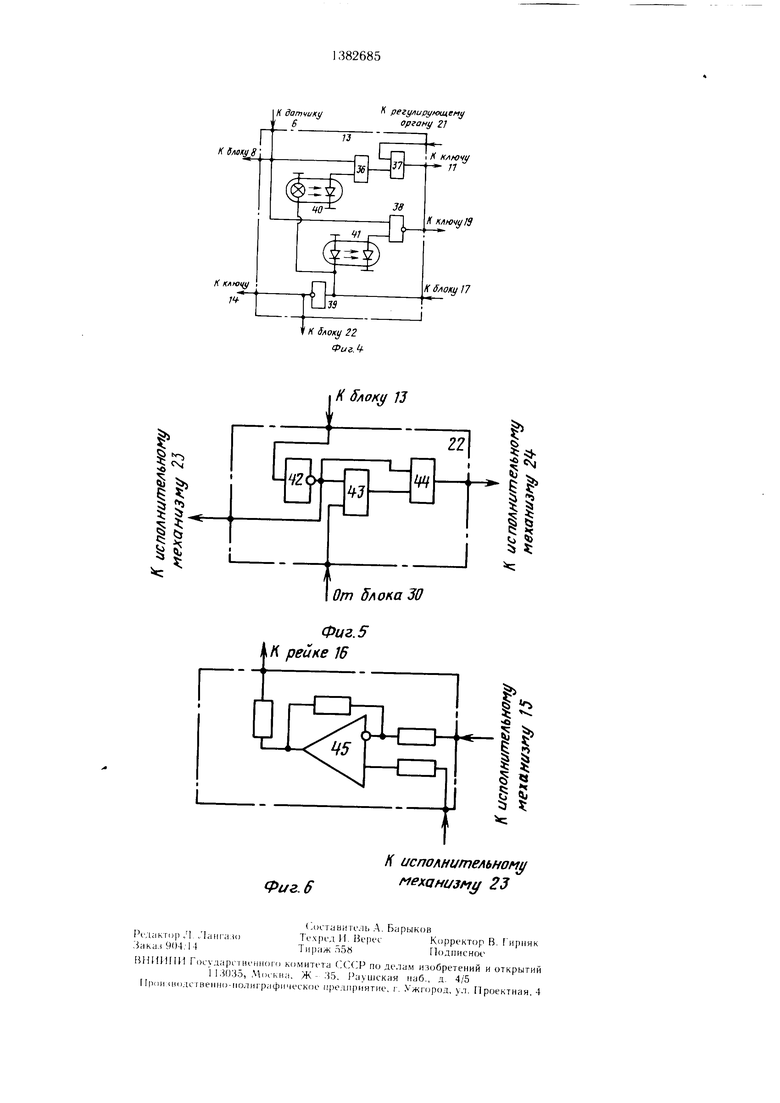
Блок формирования команд управления (фиг. 4) выполнен на логических элементах 36-39 и оптопарах 40 и 41.
Блок 22 управления разгоном (фиг. 5) состоит из логических элементов 42-44.
Дифференциальные звенья (фиг. 6) построены на операционном усилителе 45, включенном по схеме дифференциального сумматора.
САУ режимами работы транспортного средства работает следующим образом.
Задатчиком 18 скорости движения устанавливается скоростной режим движения транспортного средства. На вход блока 13 формирования команд управления, который может быть реализован на известных логических элементах И, ИЛИ, НЕ, подаются различные сочетания входных сигналов, в зависимости от которых на выходе получаются однозначные определенные переключательные функции, обеспечивающие требуе- мую последовательность работы системы, первоначально регулирующий орган 21 находится в нейтральном положении. Блок 17 сравнения передает сигнал рассогласования на блок 13 формирования команд управления, который отключает оптимизатор 12, при этом подключается блок 22 управления разгоном, который реализован на той же элементной базе, что и блок 13. После подключения блока 22 на его выходах формируются управляющие воздействия, которые передаются на входы исполнительных механизмов 23 и 24 и через дифференциальные звенья одновременно воздействуют .на рейку 16 топливного насоса и регулирующий орган 21 трансмиссии 2, который, перемещаясь, плавВо включает главное сцеп- ление и начинает уменьщать передаточное отнощение трансмиссии. Величина начальной скорости перемещения регулирующего органа выбирается максимальной, но не превышающей значения, позволяющего развивать транспортному средству ускорения, превыщающие предельно допустимые по санитарным нормам. Крутящий момент двигателя по мере включения сцепления начинает воздействовать на трансмиссию, закручивая ее валы. Характер изменения кру- тящего момента на выходных валах (полуосях) трансмиссии, пропорциональный величине внещней нагрузки, регистрируется датчиком 28, с выхода которого сигнал поступает на вход блока 29 определения скорости изменения крутящего момента (темпа). Информация о темпе изменения крутящего момента на выходных валах трансмиссии с выхода блока 29 и о темпе изменения движущегося момента (на первичном валу) с выхода блока 27 поступает в блок 30 сравнения. Величина темпа момента на полуосях сравнивается блоком 30 с темпом момента на первичном валу трансмиссии. Естн темп момента на полуосях превыщает величину темпа момента на первичном валу, то на выходе блока 30 вырабатывается сигнал превыщения, величина которого пропорциональна величине превыщения. Сигнал превыщения поступает в блок 22 управления разгоном, формирующий управление на исполнительный механизм 24, уменьщаю- щий скорость перемещения регулирующего органа 21. Тем самым осуществляется корректировка отклонения темпа на выходном валу от величины темпа на входном валу, что приводит к снижению амплитуды колебаний, и, соответственно, динамических нагрузок в трансмиссии. Тем самым скорость перемещения регулирующего органа должна изменяться следующим образом;
V
Vp...v
где Vp.,- скорость перемещения регулирующего органа;
Vo - начальная скорость перемещения регулирующего органа;
Ун-скорость изменения движущего крутящего момента на первичном валу;
Vn - скорость изменения крутящего момента на полуоси;
а - коэффициент регулирования.
Таким образом, при увеличении внещней нагрузки время разгона уве-тичивается. так как темп на выходном валу растет быстрее темпа на входном валу, а при уменьще- нии нагрузки - уменьщается. Одновременно снижается величина динамической на- груженности вследствие уменьщения амплитуды вынужденных колебаний системы за счет корректировки отклонения темпа в ту или другую сторону.
, Одновременно с началом разгона рейка 16 перемещается исполнительным механизмом в сторону увеличения подачи топлива до отказа (до упора). Разгон продолжается до тех пор, пока разность между скоростью действительной и заданной не становится меньще некоторой величины. При этом блок 13 отключает блок 22 и через ключи 14 и 19 подключает на исполнительные механизмы 15 и 20 выходы оптимизатора 12 и блока 17 сравнения. Осуществляется режим поддержания заданной скорости движения, а оптимизатор обеспечивает
: . : ч :. - , , - I i.;i :,) ; i-л I
|i, IV V -i I .U iir ГЫ: I ....
i ): .: ( llbillii V : pl i V, I h
I ,, i -i ,. i ;-. J .i ,1(1,4 l |ial , U-HH l j r i : I: I i , aiX-. Ifi 1) |:)h
;.: u ,:.M y,i);jB, it4i.iv) KK i,; i:,i .. ii;.i,,jiinh KoTup. i / iriii s
;: ,; .чао : I имлод б.лс К; I / ii;i
i,i.i M ...liiH iM 20, iifi i :; U i f itJ
i I ,. -A ii;i i Ы D l o. KiKa К к I i i
i , : : , . /..: Ч-,; i Mid
: , i I i i: i .1И I r ал1ый «,H xa ни м
;,, : ; i ,. 11 : aac i t urH :; i ))ari. ii
.1. , .;i I h ;и ,()1 u uia 4i
Г..II : ;; , i4, l(i| IMr i,l(ii
; ; :И;,1И ;:) аи 21 VIU J1I4II :: -h; i , 1 аК, ч го 1 aUIIOl, I i.
j i . . . M ai : : I I IHil liuH . I I |)M -/ 1 : - . :;;:i :: l:i--l . Л,;1 lOM il il О I 1
;. i ;;Г)1 rii;: 4iiii U так-ао ипда. . .:: i, (I il . ihHhlH )аС.ОД МИНИ
i;.i -;;.; :;.а Л и i аа /к а а ; га , и; мииим альио а. шу. Ii4:i:.a I : П. КЖ I. } tJHipvlH |1она
. i:|K,ii К нии подастся cm на;, :1 M.j opii: ( Гхлок 8 умно i) iai.MC4 он-( имичатор 2 а чс (11., ill i.(i гея 1Д б, 1ока 1 . и ia i. :: V IHHI сд1а1ый а сч м i |м : ,а|ныи на не inicHai .1 iai г: I pa iicMJiccHM ) 1( ai pv ; , I -1 laaaaiua , a ci ) ofioim : ;M . 11 i; I ;)ai.K(i об чро i ы дли t i . гмксимумa. :атчнк ;
. . i| 1 1 . M li-. 1 ,i, К((;;ИЙ f|li i
. ,. i. . i H VI H a I iip i , ч;:и-;1
i I ч , . ,, i , Л . М И a M, K:
ч ;: маи 14 паи,: i i
: p( r Д1(ропааи;1 11)1
a и-|-чД ОГ() vii j aii ч iina
аИ1 И)рТН()1(1 С 1С 1С Д Л , i:4 , If rUiT lrti; i Л- I (K I, ТИ
a;. - ,ми 6 ioKii ) ;i;-| ii iiji ;r-,|j(,(-() свнчаг с aciin ; лс a - M vnpaii. icHMU |:км VJIH
/ л : и( .v; | :Ч). -|;ц1и у ci n . Ui
4-- i 41 . fi. ioKa iftoii ji ai И :
1 ;i ;s ii i5i. I iiM.i.lMHOro одним и ; i л ;) iiriTiMbiiblM меха ИИ 14 иЛ
: i , ai- 1- ,, ч 1И|(И()Г1) иаслса ;
4:1 i п-: ч , h)V ЯИКМ о MO i ian :
ч lai 1И И)аимл1ия KI ; .i I l
i-ilii i-a, :-:)||t), l()i V )|(;ЖС ИИ-.1
i- ; i 4i f/ lOK aipa),4ciuiH p l 1 4 144 :. ч : 1 v Mc,Hii 1П1Ч1;-на
0
:
0 II
S
д.: ,jiij -pi4i iiia Лг чч,( -. i,,,,; и ,; I,;:, ; ic ЛСИИЯ i KI ;)( И ) /4 H hi, Kji V 15ia--v; ) i.io U4i/a Д|5И I a ro. l я ilpiaii M .uJ iMul-, ofi,,j;l)Oi
tM) ifi i;n ii 11 нала Mil и .)Д(а;л1 ,. .чпчим fi;,i i:- taN; - . i,oiau ; с I )iio i. BiojibiM ьчодом (1Лок,1 / шрмироиании KiyMain у iipa |;-гаия я одним ил нхпдои бл(,ка ,.; Ho/Ktaiavi, д)(, й
15л(Д :)Гир(ИО (. ОСДИИеН с Да1 ЧИК1)М Кру1Я1н,сг() ло 1сл1га дни ;М1 Ли а иыход с од ним i: i влод.ом ibi i гора, игорой ьлод noTopoi o ioca.HiiOH V дагчи ком расхода тои- .iiiiia. а Dbixoji . с И iiajibiiwM входом од Hoi o и (Д|, :л.|.()д )oiii соединен с исаюд.чн I е.||1, Ч л а низмом л1)аидС11нн рейкой roii;iJiBHOi ч па. иа, а у||)ав,,ий вход с нс)вым иьгход..,; блока формиро вания (чоманд уиравлсиии ит)о(|, 1ре1ИЙ и летвергый выходы Ko ioptjM, ctiea.niieHu rooi- 1К ГС1ьсиио с ун()г1В. 1ЯК)а1.ими входами ыор01() и 1 еГЬС1(; пДЮ К Й и Ipeit.HM ВЧОДОМ
(j б. ижа ум (1 1же11ия, выход июрого кдюча соединен с одиим ич входоь иснод- ии-1е. ьио|-о .механи:(ма у 1равд(лжя )ук)1цим органом передачи, вюрсж вход которою соедирюн с |д,1ходом грегьего , соединенного си||1а.тьным входом с а рвым выходом блока сраьиснин, т)етий вх(д 6.:io ка ()о)1иронанин команд ун)ав.1ения свя :ian с pel у;1И{)ук)1ним opianoM передачи, нри чтом первый вход б. юка у11)авдения paai o- ном соеди}1ен с пятым выходом бдока фор- команд ун|)авдепия, выходы блока управлении ра:л оном с(;етинсн 1 i в.чода ми ип|о, 1нитед1, механизмов ia.u oHa, выход,| которых сое ituiL Hi.i ( ОД11ИМ вхо дов диффереии.иал1а1п1 .uieiibCB, вторые иходЛ) ди1}) 11.НЫЛ чвсньев соеди HcHfJ с исиолнитедыилми мсчанилмамл унрав леиия рейкой то1 ливио о насоса и ре1уди руюшим органом бес тс|ил1чатой не Н лачи, иыход|,| диф|4)е(;1е 111иалы11яХ ..св соед11 Hciii.i i )ейк(М1 nai И- i|i;;.; iiaC(.cH и ара. дя1он1,им органом i ч с;;чат 1М нсречачи. до1Кх;:ни rivibfibiii .т датчика кругящсго момента соединил; с ( блока О11)сделе- г1ия скорости иамеисиии кругни1е;о мо.мент а ДВН1 ате.чя, BTijpoii яичоч б,,11)ка VM о./1 ,емия 1-оединен с одним и- иход:; нто)ого бдока сравнения, д)угой вход, )го соединен с тадагчик(;м мощности дви1 ателя, а выход с сигнальн1)|м входом второго к;1юча, отличающаяся тс,м, что, с 1и;.чыо нов -инення ificKTHBHOCTH иугсм у,т чи1ения ир(Л1Ссса paiioiia при снижении уровня ,;1ннамической а1 ружсл 11остн в 1 ран: миссии, она спабжс H;I доио, 1ните,(,|М ;, атчиком кругячач о момент и, дон(1чните, 11иым б. юком о)едс дения скорости ,и тмснслн момен la и 1)егьим б,,током )Н 1ения, а)и ITOM ,и)11о, ииггет1)Иый дагчик , яиич с) момента |ia:sMCiHeH на выходном вату трансмигсии и
ВЫХО,ТОМ подключен к HXO,:U ДОИОЛ ИИ 1 еЛЬHOF o блока ()н(дс,темня из,менения крут чикд о момент а выход когорого 1о(, дт1713826858
нен с входом третьего блока сравнения, дру-щего момента, выход третьего блока сравгой вход которого соединен с выходом бло-нения подключен к второму входу блока
ка определения скорости изменения крутя-управления разгоном.
От датчика 5 От датчика 6
К оптимизатору 1Z
1 К датчик(/ 4
От лока /J
Фиг. 2
К SAOK 8
J (к/wчy1 t Фиг.
к датчику 6
К SMUuSi
К
К 5локу 22 ФигЛ
К 5ло1(1 /J
От 5л ока 30
Фиг. 5 К рей не 16
К регулируницему органу ZJ
Л
К ключу J3
К бмку 17
| Система автоматического управления режимами работы транспортного средства | 1983 |
|
SU1115932A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
