t
Изобретение относится к контролю и автоматизации технологических процессов (ТП), в частности к способам измерения таких физических величин, которые не поддаются непосредственному измерению, и может бьггь использовано в АСУ ТП и в локальных системах автоматизации при контроле и управлении технологическими процессами, гфеимущественно в горной пррмьшшенности для контроля режимов экскавации и качества подготовки забоя.
Известны способы косвенного контроля и измерения режимной координаты, не поддающейся прямому измерению, например способ измерения веса материала, выгружаемого из ковша экскаватора, при котором сигнал разности умножают на сигнал, равный разности между постоянным сигналом, пропорциональным весу порожнего ковша с рукоятью, и сигналом, пропорциональным частному от деления половины произведения длины рукояти на длину вьщвинутой части рукояти Li 3.
Однако для повышения точности таких способов контроля приходится полнее считывать всю совокупность влияющих факторов, из-за чего быстро растет сложность функциональной зависимости, лежащей в основе измерения, и ее аппаратурной .реализации, а это вызывает объективное ограничение практически достижимой точности. Кроме того, многие влияющие факторы часто, в свою очередь, не поддаются измерению. Если же ограничить ся кругом измеряемых первичных переменных, то остальные факторы - помехи никак не учитываются.
Наиболее близким к предлагаемому является способ измерения режимной координаты,технологического про- . цесса, основанный на измерении технологических параметров и вычислении по ним оценки режимной координаты с помощью регрессионной модели. В нем по сигналам датчиков натяжения подъемного каната, его длины и выпета рукояти косвенно измеряемую загрузку ковша определяют с помощью одной регрессионной модели, используемой в качестве расчетной формулы. Точность контроля достигается выбором рационального момента измерения. Область вариации первичных, независимых переменных (факторов) узка в момент открывания днища ков27953 2
ша при его разгрузке. Благодаря
этому найденное по данным наблюдений в этой области уравнение регрессии остается адекватным, а измере ние загрузки ковша достаточно точ- , ным во всех дальнейших циклах экскавации t2
Однако при известном способе измеряемая величина не стохастическая непрерывная .переменная а постоянная величина в течение всего периода поворотного движения экскаватора. Именно поэтому достаточно выбрать один наиболее благоприятный момент измерения, чтобы обеспечитьхорошую точность определения загрузки ковша. Способ не решает общей задачи косвенного измерения, так как при широкой области вариации факторов и/или нестационарности ТП, он не дает точных результатов.
Устройство для измерения режимной координаты технологического процесса j содержащее датчики техноло/гических параметров и блок определеI ния оценки режимной координаты, Iпостроено -на одной регрессионной модели и разпознавателе момента взвешиванзия содержимого ковша, благодаря выбору которого достигается 0-
повьвпение точности, с которой отклик
модели отражает действительную загрузку ковша. В этот момент распознаватель открывает ключ и пропускает сигнал измеряемой загрузки,на инди5 катор, причем разпознавание кондиционного момента цикла экскавации происходит либо по нажатию машинистом кнопки открьшания днища ков,ша, либо по наступлению определенно0 го соотношения факторов L3 2.
Однако общая задача измерения непрерьганой стохастической координаты ТП не решаема с помощью одномодельной измерительной схемы. Б
5 ней выбором момента отбора информации уже нельзя достичь повьшения точности измерения.
Целью изобретения является повышение точности измерения и расшире0 ние области использования.
Поставленная цель достигается тем, что при способе измерения режимной координаты технологического процесса, основанном на измерении
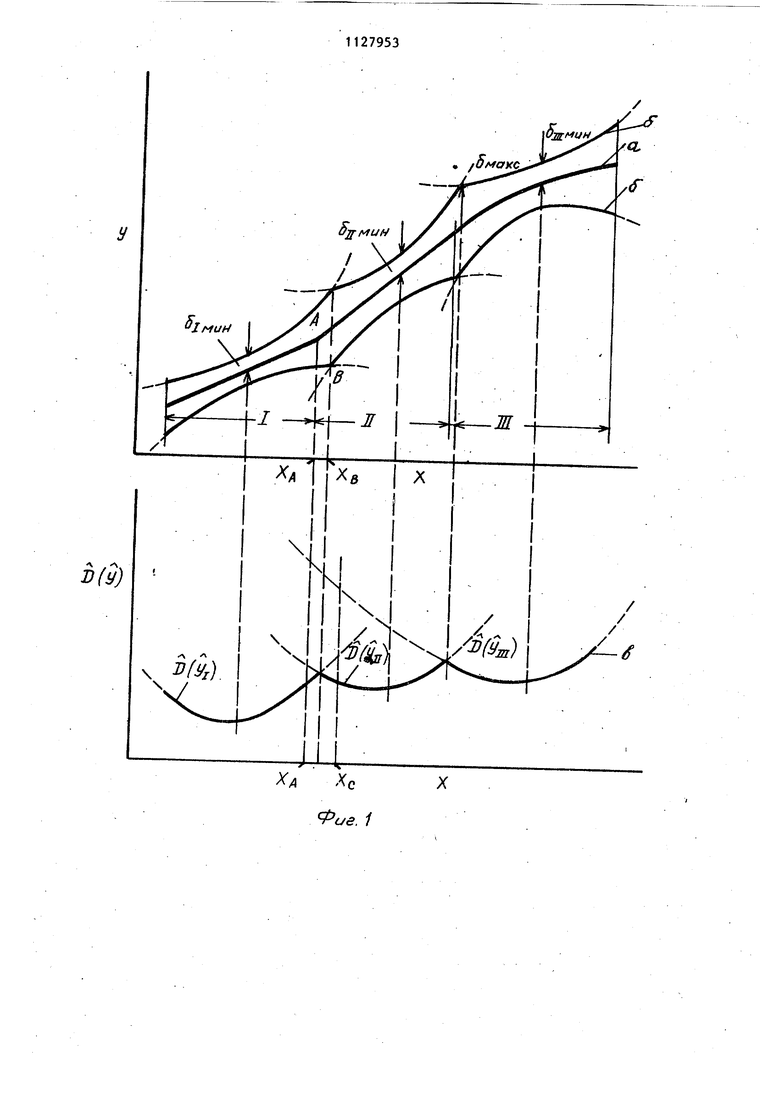
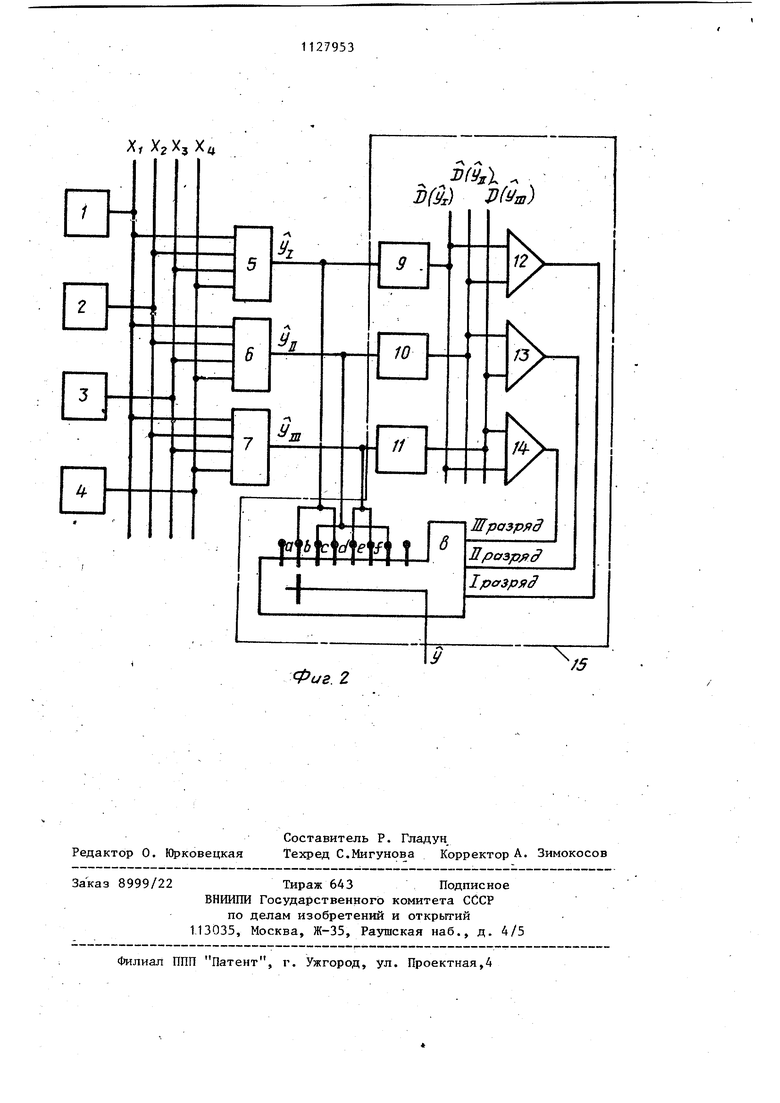
5 технологических параметров и вычислении по ним оценки режимной координаты с помощью регрессионной модели, дополнительно определяют рцен-ки режимной координаты по числу режимов технологии, измеряют и сравнивают между собой дисперсии полученных для каждого режима технологии оценок режимной координаты и о текущем ее значении судят по величине оценки того режима технологии, в котором дисперсия оценки режимной координаты в данньй момент времени минимальна. При -этом устройство для измерения режимной координаты технологического процесса, содержащее датчики технологических параметров и блок определения оценки режимной координаты, снабжено дисперсиометрами, компараторами и дополнительными блоками определения оценки режимной координаты по числу режимов технологии и управляемым коммутатором, причем выходы датчиков технологических параметров подключены к входам .соответствующего блока определения оценки режимной -координаты, выходы каждого из которых соединены непосредственно с информационными входами управляемого коммутатора и через последовательно соединенные дисперсио,метры и компараторы с управляющими входами управляемого коммутатора. ;ВЫХОД, которого является выходом устройства . На фиг.1 изображены линии регрессии, доверительных границ и дисперсий в области вариации первичного -фактора; на фиг.2 - блок-схема пред- 35 лагаемого устройства для измерения режимной координаты технологического процесса. Сущность способа измерения режимной координаты технологического про- 40 цесса состоит в том, что вначале всю область вариации первичных измеряемых технологических величин ТП разбивают на подобласти, т..е. оп. ределяют, из каких режимов техноло- 45 гии состоит данньй ТП, а затем в каждом из них огГределение значений измеряемой координаты ТП производят по первичным технологическим величинам с помощью регрессионной модели 50 данного режима. Каждьй раз, когда косвенное измерение координаты ТП выходит за пределы заданной точности, переходят к новому прямому измерению и преобразованию первич- 55 ных технологических величин, в результате чего вновь получают адекватное значение координаты ТП. ду что бол ре ноф нос сре ка дан фак оц S// лен нии ван чая ра II 5 линтел V мер .Достоверность зтого решения слет из известного положения о том, любое уравнение регрессии наиее точно предсказывает в центфакторного пространства. В одакторном случае эта достоверть видна из выражения для оценки днеквадратической ошибки отюиY регрессионной модели в заной точке интервала вариации тора . (ч-м .кв.ош Z(x,-x) наблюдаемые значения фактора х , общее среднее значение х-ов по выборке объема п , .(х.-х) сумма квадратов отклонений фактора; заданная точка интервала .вариации фактора i оценка остаточного среднеквадратическо- го отклонения Y-ой т.е. эксперименталь- .но наблюдаемых зна- чений Y измеряемой координаты ТП. Эта оценка минимальна и равна n в центре наблюдений, при удаии от которого в любом направлеона растет. Это проиллюстрироо графически на фиг.1 для слу, когда интервал вариации фактосостоит из трех подинтервалов I, и III, где а- Jшния регрессии, линии доверительных границ, в ии дисперсий. Ординаты довери- , ьных границ для равны .)t ошибка в любойК-й точке интервала вариации факторах, (1 - у об) %-наяточка t -распределения (Стьюдента) с (м-2) степенями свободы (Л- уровень риска). Минимальные значения ошибок изения координаты ТП в подинтервалах при одинаково адекватных регрессионных моделях близки одно к другому c/-j « «пмин .й микмаксимальное значение имеет место на стыке подинтервалов. Согласно сущности предлагаемого измерения при переходе технологического процесса из одной подобласти факторов в другую необходимо соответственно переключать регрессионные модели. Для этого нужно непрерывно измерять и сравнивать между собой оценки дисперсий Л(У) откликов всех моделей. Выбор именно соотношения дисперсий в качестве критерия для переключения моделей обусловлен простотой и точностью его контроля. Шнимальная из оценок дисперсий указывает наиболее адекватную модель в данный момент вре- мени, иначе говоря, она указывает, в какой подобласти факторов находится ТП, по какой модели следует вычислять измеряемую координату в данный момент времени. Например, как указывают линии в дисперсии (фиг.Т), чтобы оценка дисперсии не превысила ординат сплошной линии или,что то же, чтобы ошибка измерения координаты ТП не превысила допустимого значения сУдоп в точке Хд , где ) D (Y,-) S ( Y, ) , выбирается модель I; в точке , где I)(Yj)D lY-) I) ( ,-) модель II; в точке Же происходит переключение моделей I и II. Таким образом, всякий раз, когда ошибка измерения координаты превысит допустимое значение, извлекают новую информацию из ТП, благодаря чему сохраняется точность измерения Способ измерения режимной координаты предназначен для технологических процессов, в которых различаются не менее двух режимов технологии., заметно очерченных последовательно сменяющихся состояний, суще ствуюп1их на различных интервалах времени. Критериями для такого различения могут служить статистичес кие критерии однородности выборок из этих режимов ТП. Последние и соответствуют подобластям факторного пространства. Для широкого круга тех нологических процессов число подобластей не превьштает пяти. Это связано с тем, что при характерных для .этого круга процессов диапазонах изменения технологических величин дальнейшее дробление их на число 1 36 подобластей, большее пяти, не дает дальнейшего существенного повьш1ения точности измерения, но затрудняет различимость и дискриминацию моделей при большей сложности измерения. Это происходит в силу экспоненциального характера зависимости уменьшения ошибки измерения от числа моделей. При переходе от одной модели к двум - трем (фиг.1) происходит резкое уменьшение ошибки, а с дальнейшим ростом числа моделей это уточнение измерения все бол,ее падает. Способ измерения базируется на возможности нахождения уравнений регрессии как расчетных формул по известной методике. Для этого массивы опытных данных об измеряемой координате ТП снимают с помощью доступных ручных методов опробования и контроля невысокой точности, например методов химического, спектрального, ситового, седиментационного экспресс-анализа проб, отбираемых в ходе процесса, гравитационных, масс-спектрографических, расчетных, балансовых и других методов лабораторного анализа, с помощью оптических пирометров, стробоскопических измерителей, различных анализаторов и т.д, Если нет возможности получить экспериментальные выборки данных. то, значит, настоящий способ измерения неприменим. Предлагаемый способ включает преобразование первичных технологических величин регрессионными моделями ТП. Причем действия над этими величинами, входящие в преобразование регрессионной моделью, заключены в самой модели для конкретного ТП и конкретного режима ТП, Предлагаемый способ можно использовать, например для измерения массовой загрузки ковша экскаватора в любом его положении по таким измеримым величинам, как геометрическое расположение рабочего оборудования, нагрузки в механизмах подъема и напора, измерения характеристик экскаваторного забоя по токам электроприводов экскаватора и геометрическим координатам его рабочего оборудования; измерения тонины помола в мельницах обогащения по измеримым загрузке руды, воды, мелющих тел и возврата и выгрузке пульпы акустическому и вибросигналам, а также в металлургических процессах обжига концентратов в кипящем слое для измерения содержания остаточной серы в огарке по таким технологическим величинам, как температура обжига, расход дутья, концентрата, аэродинамический режим, выгрузка агарка и обжиговых газов и в тонколистовой холодной прокатке для измерения надлежащего раствора валков по скорости прокатки и сигналам толщиномеров до и после клети. Устройство для измерения режимной координаты технологического .. процесса (фиг.2) построено применительно к ТП, в котором вьщеляются три режима технологии (три подобласти технологических парамет ров) , причем измеряемая режимная координата Y тесно коррелирует с четырьмя технологическими параметрами 21 4 которые поддаются непосредственному измере нию с помощью датчиков (случай достаточной общности). Для режимов (технологии 1,11 и III найдены регрессионные модели . .3S 44: Yffi-SX c, . Каждое из этих уравнений реализ вано в виде вычислителя сигнала Y сигналам датчиков учетом соответствующих коэффициентов о, b и с. Устройство измерения координаты ТП содержит датчики 1-4 первичных технологических параметров, блоки 5-7 определения оценки режимной координаты по регрессионным моделя управляемый коммутатор 8, дисперсиометры 9-11 и компараторы 12-14 Выходы всех датчиков 1-4 подают на соответствующие .входы каждого из блоков 5-7, выходы которых подсоединены как к соответствующим па рам информационных входов о-с и b и управляемого коммутатора 8 так и к входам соответствующих дис персиометров 9-11. Выходы дисперсиометров 9-11 попарно подключены к двум входам каждого из компараторов 12-14, выходы последних соед нены с управляющими входами соответствующего разряда управляемого коммутатора 8, выход которого является общим выходом всего измеритель ного устройства. Элементы устройства для измерения режимной координаты ТП конструктив- но выполнены следующим образом. Датчики 1-4 представляют собой преобразователи первичных технологических величин в напряжение постоянного тока. В блоках 5-7 определения оценки режимной координаты по регрессионныммоделям для вьтолнения операций сложения и вычитания могут быть применены сумматоры на базе микросхемных операционных усилителей общего применения. Управляемый коммутатор 8 - это многоканальньвй (многовходовый) ком- мутатор, управляемый двоичным кодом. Здесь может быть применен микросхемный восьмиканальный коммутатор типа К590КН1, управляемый трехразрядным параллельным двоичным кодом. Суть его работы заключается в том, что к общему аналоговому выходу микросхемы подключается тот из ее восьми входов, номер которого соответствует двоичному числу, поданному на кодовые входы управления . Дисперсиометры 9-11 также могут быть построены средствами аналоговой шкpocxeмoтexники, например, по функциональной схеме,в которую входят два усредняющих фильтра, сумматор и перемножитель. Это возможно благодаря тому, что выходные сиг- . блоков 5-7 в пределах подобласти факторов представляет собой стационарные и эргодические случайные фу нкции времени Vi-t). Выходной сигнал такого дисперсиометра достаточно точно выражает дисперсию сигнала (t) при t / (610)1, где Т - доверительный отрезок времени, наприме:р, для измерения с точностью в 1% он равен 16 Т,, где fn - интервал автокорреляции выходного сигнала вычислителя по. регрессионной модели. Дисперсиометры постоянно подключены к выходам блоков определения оценки режимной координаты, благодаря чему их сигналы адекватны. При больших постоянных времени Т усредняюпщх фильтров следует использовать мало-. шумящие операционные усилители широкого применения типа К551УД1А. Компараторы 12-14 предназначены для вь1работки управляющего кода многовходового коммутатора и особы требования к ним не предъявляются. Для согласования со стандартными уровнями цифровых сигналов интегральных коммутаторов в практической схеме удобно использовать компараторы напряжения типа К52-1САЗ, Дискриминатор 15 моделей включа в себя совокупность блоков 8-14 (фиг.2, пунктир). Его функциональная роль заключается в том, чтобы выход всего устройства в качестве сигнала У подавать тот из выходных сигналов Yj, jj или Y, вычислителей 5-7 дисперсия которого минимальна. Спосйб осуществляется следующим образом; Выходные напряжения т, у х. датчиков 1-4 непрерывно подают на выходы каждого из блоков 5-7 и преобразуют ими по регрессионным моделям каждой подобласти факторов в соответствующие сигналы измеряемо координаты ТП. Дискриминатор 15, моделей осуществляет выбор между этими сигналами. Для этого все выходные сигналы Vf , Y,7 и V j блоков 5-7 также непрерывно пос тупают на соответствующие информационные выходы а-с, Ь- f и е управляемого коммутатора 8 и соответственно на входы дисперсиометров 9-11. Последние непрерывно вьфабатывают сигналы пропорциональные оценкам дисперсий сигналов каждого из блоков оценки определения режимной координаты. Компараторы 12-14 осуществляют срав нение сигналов дисперсий. При таком :попарном соединении выходов диспер|сиометра с входами компараторов (фиг.2) однозначно возможны только следующие кодовыекомбинации на выходах компараторов (компаратор 12 соответствует I разряду кода, компаратор 13 - II разряду, компаратор 14 - III разрядуi если напряжение, подаваемое на первый (инвертирующий) вход компаратора 12 больше подаваемого на второй (неинвертирующий) вход, то на выходе компаратора 12 будет сигнал логической 1 в противном случае - логический О. Это относится к каждому-из компараторов 12, 13 и 14). В случае,когда дисперсия ) . сигнала вычислителя 5 наименьшая из трех 001 (соответствует 1 в десятичной системе счисления),если D(ji) ();011 (соответствует 3), еслта S(ij $(,,). В , когда минимальна дисперсия, Г (у,-) сигнала вычислителя 6 0.10 (соответствует 2), если В(У(Г|) 1)(Ут)г110 (соответствует 6), если r(Y,3)S(Y,). В случае, когда минимальна дисперсия i)(Y,7i) сигнала вычислителя 7 , J, /Ч 100 (соответствует 4), если D(Vj) P(YuL)i 101 (соответствует 5), если (х)Р(й)Кодовые комбинации 000 и 111 в рассматриваемой схеме принципиально невозможны. Каждой кодовой комбинации соответствует подключение к выходу всего измерительного устройства соответствутющего из информационных входов управляемого коммутатора 8. Например,если минимальна дисперсия сигнала Yj- возможны две кодовые комбинации, при которых управляемый коммутатор 8 подключает на выход либо свой информационный вход а либо вход с, Поэтому в схеме (фиг,2) эти входы объединены и подсоединены к выходу блока 5. Аналогичные соединения соответственно возможным кодовым комбинациям произведены и для двух других рассмотренных случаев. Таким образом, к выходу измерительного устройства всегда подключена та регрессионная модель, дисперсия сигнала которой в данный момент времени наименьшая, а следовательно, определение измеряемой режимной координаты производится по наиболее адекватной регрессионной модели. Это значит, что за величину измеряемой (искомой) координаты в данный момент времени берется результат того первичного измерения и преобразования, которое соответствует данному технологическому режиму. Использование предлагаемых способа и устройства позволит расширить область использования на непрерывные стохастические переменные - за счет непрерывного контроля точности измерения переменной и автоматической перестройки измерительного устройства на более точную в данньй момент времени модель
11
при выходе ошибки измерения за допустимые пределы; иа нестационарные ТП - за счет разделения глобально нестационарного технологического процесса на 2-5 сменяющих один другой во времени локально стационарных процессов, в каждом из которых факторы и переменные характеризуются отсутствием трепдон, однородностью дисперсий, в них соблюдаются предпосылки метода регрессионного анализа, а также условия эргодичности переменных (благодаря последнему упрощается контроль дисперсии выходных сигналов регрессионных моделей)-, на технологические тфоцессы, которые во всей области факторов обычно требуют для своего описания нелинейных по параметрам уравнений регрессии, - за счет того, .что в узких локальных подобластях факторов всегда можно подобрать адекватные линейные по параметрам уравне12795312 ,
i ния; на случай измерения двух и более координат ТП. По предлагаемому способу это можно ос ествить на базе одних и тех же первичных дат5 чиков.
Изобретение позволит также повысить точность измерения режимной координаты ТП за счет умекыпенйя удаленности вектора факторов от
центра наблюдений. В однофакторном случае - это уменьшение величины (), а также за счет непрерьшного контроля точности измерения и уменьшения остаточной дисперсии в центре наблкщений, поскольку теперь уравнения регрессии подбираютс и оцениваются для узкой подобласти вариации факторов и облегчается вьлолнение четырехкратного Крите-, рия точности предцсказания.
Способ позволит, уменьшить ошибку измерения до 2-3 раз по сравнению с регрессионным измерением на базе одномодельной измерительной схемы.
А А
(У)
Фиг. Z
/5

| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПРОЦЕССА КОНТРОЛЯ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 1990 |
|
RU2042168C1 |
| Устройство для контроля измерительной информации | 1987 |
|
SU1450115A1 |
| Устройство для проведения многофакторного эксперимента | 1989 |
|
SU1691820A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИЙ ХРОМОФОРОВ БИОЛОГИЧЕСКОЙ ТКАНИ | 2012 |
|
RU2506567C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГЕМОГЛОБИНА И СТЕПЕНИ ОКСИГЕНАЦИИ КРОВИ В СЛИЗИСТЫХ ОБОЛОЧКАХ | 2013 |
|
RU2528087C1 |
| СПОСОБ И УСТРОЙСТВО ЭКСПРЕСС-ОЦЕНКИ РАБОТОСПОСОБНОСТИ ЧЕЛОВЕКА-ОПЕРАТОРА В ПРОИЗВОДСТВЕННЫХ УСЛОВИЯХ, ПРИ ЭКОЛОГИЧЕСКИ НЕБЛАГОПРИЯТНЫХ ВОЗДЕЙСТВИЯХ И РЕАБИЛИТАЦИИ ПОСЛЕ ТРАВМ И ЗАБОЛЕВАНИЙ | 1998 |
|
RU2164075C2 |
| Устройство для прогнозирования ресурса электромеханических систем | 1985 |
|
SU1359859A1 |
| СПОСОБ ПОВЫШЕНИЯ ДОСТОВЕРНОСТИ И ИНФОРМАТИВНОСТИ РЕЗУЛЬТАТОВ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 2009 |
|
RU2434228C2 |
| Способ контроля процесса брожения теста | 1981 |
|
SU1027613A1 |
1. Способ измерения режимной координаты технологического процесса, основанный на измерении технологических параметров и определении по ним оценки режимной координаты с помощью регрессионной модели, отличающийся тем, что, с целью повышения точности измере - НИН И расширения области использования, дополнительно определяют оценки режимной координаты по числу режимов технологии, измеряют и сравнивают между собой дисперсии полу ченных для каждого реяЙ1ма технологии оценок режимной координаты и о текуп ем ее значении судят по величине оценки того режима технологии, в котором дисперсия оценки режимной координаты в данный момент времени минимальна. 2. Устройство для измерения режимной координаты технологического процесса, содержащее датчики технологических параметров и блок определения оценки реяммной координаты, отл, ичающееся тем, что оно снабжено дисперсиометрами, i компараторами и дополнительными блоками определения оценки режимной (Л координаты по числу режимов технологии и управляемым коммутатором, причем выходы датчиков технологических параметров подключены к входам со5 ответствующего блока определения оценки режимной координаты, в ыходы ка кдого из которых соединены неЮ посредЬтвенно с информационными входами управляемого коммутатора и СО СП через последовательно соединенные дисперсиометры и компараторы с уп09 равляющими входами управляемого коммутатора, выход которого является выходом устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР 488504, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
